СО
с
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАНИПУЛЯТОР ДЛЯ ПОЗИЦИОНИРОВАНИЯ ЗОНДА | 1992 |
|
RU2056666C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2050037C1 |
| Сканирующий туннельный микроскоп | 1990 |
|
SU1797149A1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 1991 |
|
RU2018188C1 |
| Растровый туннельный микроскоп | 1987 |
|
SU1471232A1 |
| Сканирующий туннельный микроскоп | 1988 |
|
SU1564702A1 |
| КОМБИНИРОВАННЫЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП - РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 1994 |
|
RU2089968C1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
Изобретение относится к устройствам для точного дистанционного позиционирования образца и может быть использовано, например, в растровых туннельных микроскопах. Целью изобретения является расширение эксплуатационных возможностей позиционера образца за счет увеличения числа степеней свободы при сохранении простоты конструкции. Устройство содержит горизонтальное основание, преобразователь движения, образованный четырьмя пьезокерамическими трубками, которые параллельны и симметричны относительно вертикальной оси основания и жестко закреплены с одной стороны на основании, а с другой - относительно нижней поверхности пластины, на которой размещена каретка с возможностью проскальзывания относительно пластины. 1 ил.
Изобретение относится к устройствам для точного дистанционного позиционирования образца и может быть использовано в приборах для локального анализа поверхности твердых тел, например, в растровых туннельных микроскопах.
Целью изобретения является расширение эксплуатационных возможностей позиционера образца за счет увеличения числа степеней свободы позиционирования при сохранении простоты конструкции.
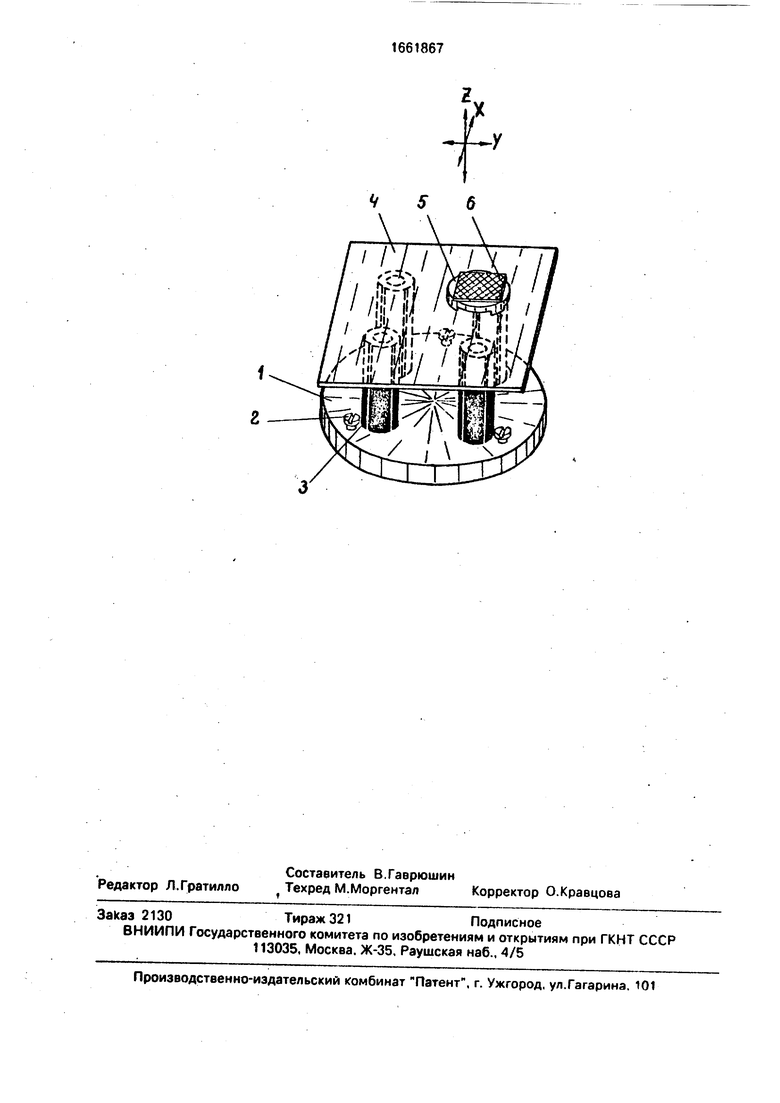
На чертеже показана схема устройства.
Позиционер образца состоит из основания 1, снабженного тремя регулировочными винтами 2, четырех пьезокерамических трубок 3, каждая из которых имеет четыре секторных управляющих электрода на внешней и один на внутренней цилиндрических поверхностях, направляющего элемента в виде пластины 4. выполненной, например, из стекла, и подвижной каретки 5 с обьектодер- жателем 6. Пьезокерамические трубки 3 расположены параллельно и симметрично относительно вертикальной оси основания и жестко соединены нижними концами с основанием, а верхними - с нижней поверг хностью пластины.
Устройство работает следующим образом.
Позиционер предварительно устанавливают горизонтально с помощью регулировочных винтов. При включении управляющего пилообразного напряжения между внутренним и внешними электродами любой из пьезокерамических трубок последняя, в зависимости от полярности напряжения, удлиняется или укорачивается
ON Оч
00 С VI
вдоль оси Z. Подача на противоположные наружные электроды одинакового по величине, но противоположного по знаку напряжения относительно обычно заземленного внутреннего электрода приводит к изгибу пьезокерамической трубки в направлении X и Y в зависимости от того, какая пара из электродов находится под напряжением. Если это напряжение пилообразное и синхронно прикладывается ко всем четырем пьезокерамическим трубкам таким образом, что последние изгибаются в одну и ту же сторону, например вдоль оси X, то в фазе медленного линейного нарастания напряжения плоская пластина, жестко связанная с верхними концами пьезокерамических трубок, и каретка, свободно размещенная на пластине, перемещаются в направлении X. Сила трения покоя каретки удерживает ее от перемещения относительно пластины. В фазе скачкообразного спадания амплитуды пилообразного напряжения концы трубок и плоская пластина резко возвращаются в исходное положение. Приобретаемое при этом ускорение пластины настолько велико, что сила инерции, действующая на каретку с образцом, превышает силу трения покоя, в результате чего пластина проскальзывает под кареткой, и последняя перемещается относительно пластины вдоль оси X. Величина элементарного шага и скорость перемещения каретки определяются амплитудой и частотой пилообразного напряжения, а максимальное перемещение ограничено лишь геометрическими размерами плоской пластины в направлении X.
Поворот каретки с образцом на требуемый угол относительно вертикальной оси Z осуществляется за счет изгиба трубок в направлениях, перпендикулярных друг другу. Причем диапазон вращений по углу также не ограничен. Приложение постоянного напряжения ко всем г.-чружным электродам приводит в зависимости от полярности напряжения к перемещению пластины и каретки по оси Z или к их наклону на углы
относительно осей X и Y. Линейные и угло- вые перемещения при этом ограничены лишь пьезоэлектрическими свойствами используемой керамики и напряжениями пробоя изоляции между электродами и
основанием. Однако даже малые с макроскопической точки зрения линейные и угловые перемещения оказываются достаточными для точного позиционирования образца относительно анализирующего
зонда, например относительно иглы растрового туннельного микроскопа.
Позиционер прост по конструкции, технологичен и обеспечивает дополнительно пять степеней свободы перемещения обраэца.
Формула изобретения Позиционер образца, содержащий горизонтальное основание, пьезокерамический преобразователь движения, жестко установленный на основании, и каретку с обьектодержателем, установленную со стороны подвижной части преобразователя движения с возможностью проскальзывания относительно поверхности направляющего элемента, отличающийся тем, что, с целью расширения эксплуатационных возможностей за счет увеличения числа степеней свободы позиционирования
при сохранении простоты конструкции, преобразователь движения образован четырьмя пьезокерамическими трубками, размещенными параллельно и симметрично относительно вертикальной оси основания,
а направляющий элемент выполнен в виде пластины, жестко закрепленной на подвижных концах пьезокерамических трубок.
| Бинниг, Смит | |||
| Трубчатый трехкоорди- натный пьезопреобразователь для растрового туннельного микроскопа | |||
| - Приборы для научных исследований, 1986, № 8, с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Поль | |||
| Динамическое пьезокерамиче- ское устройство перемещения | |||
| - Приборы для научных исследований, 1987, ISfe 1, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
