Изобретение относится к транспортным средствам и может быть использовано людьми с ограниченной подвижностью.
Целью изобретения является повышение безопасности при перемещении по поверхностям с различным профилем за счет автоматического регулирования положения движителя в зависимости от профиля.
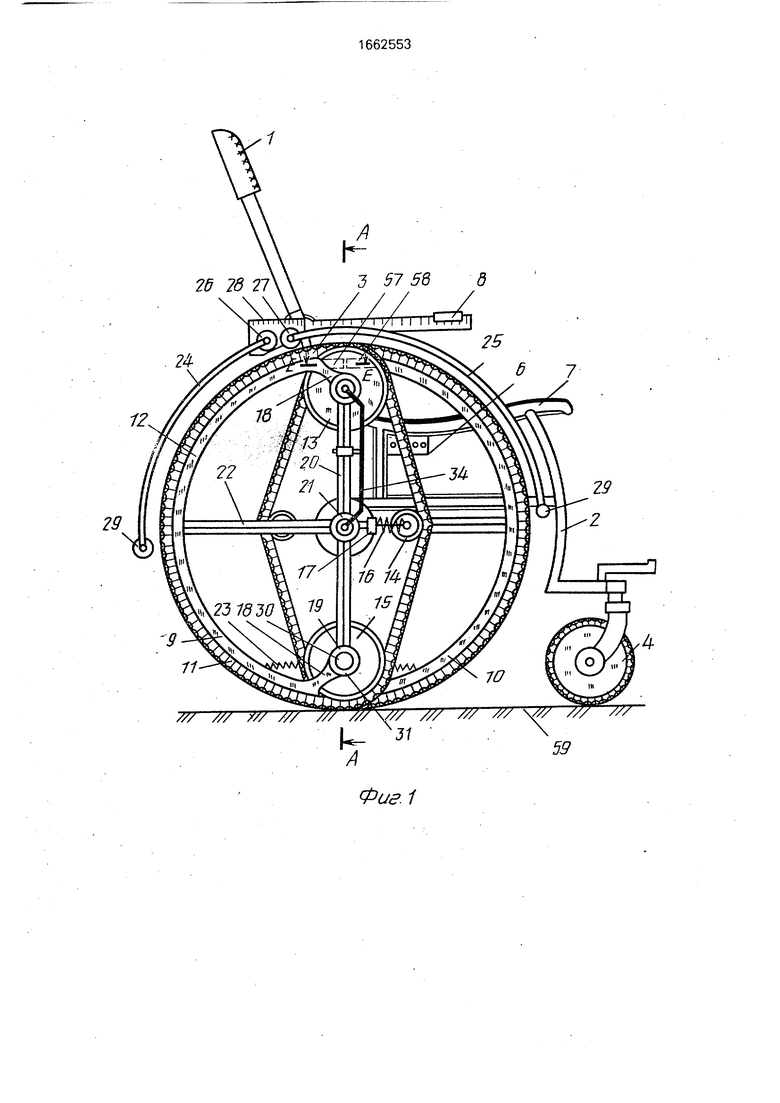
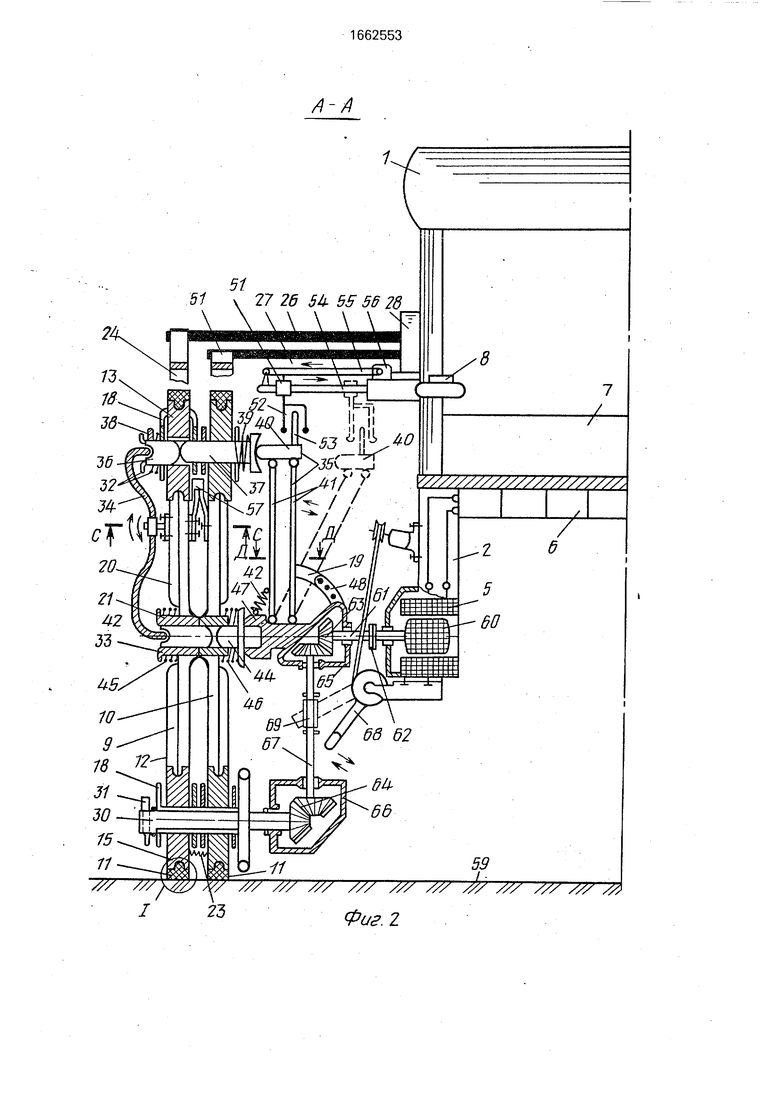
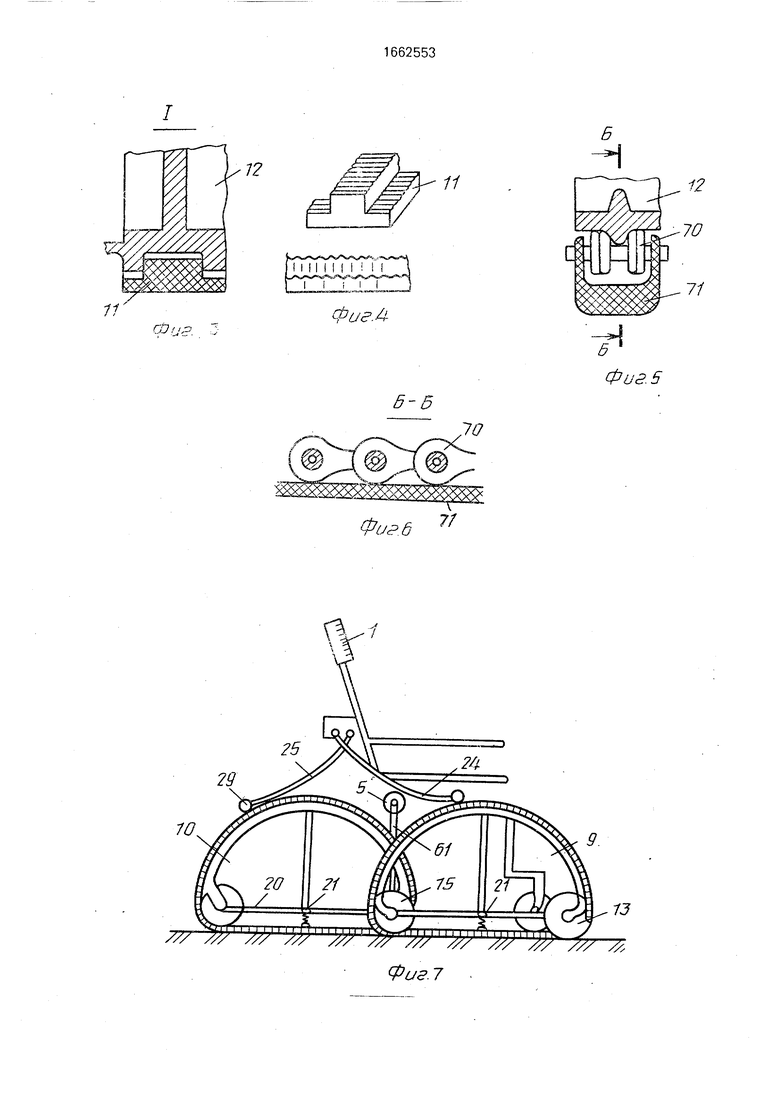
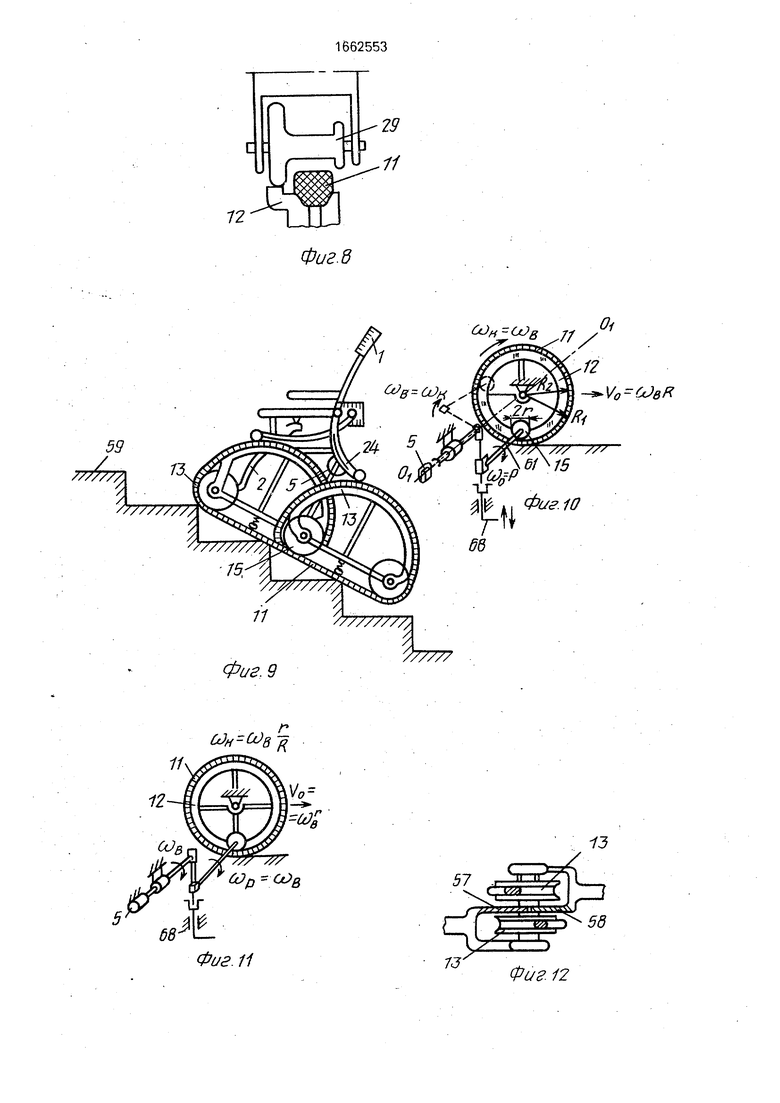
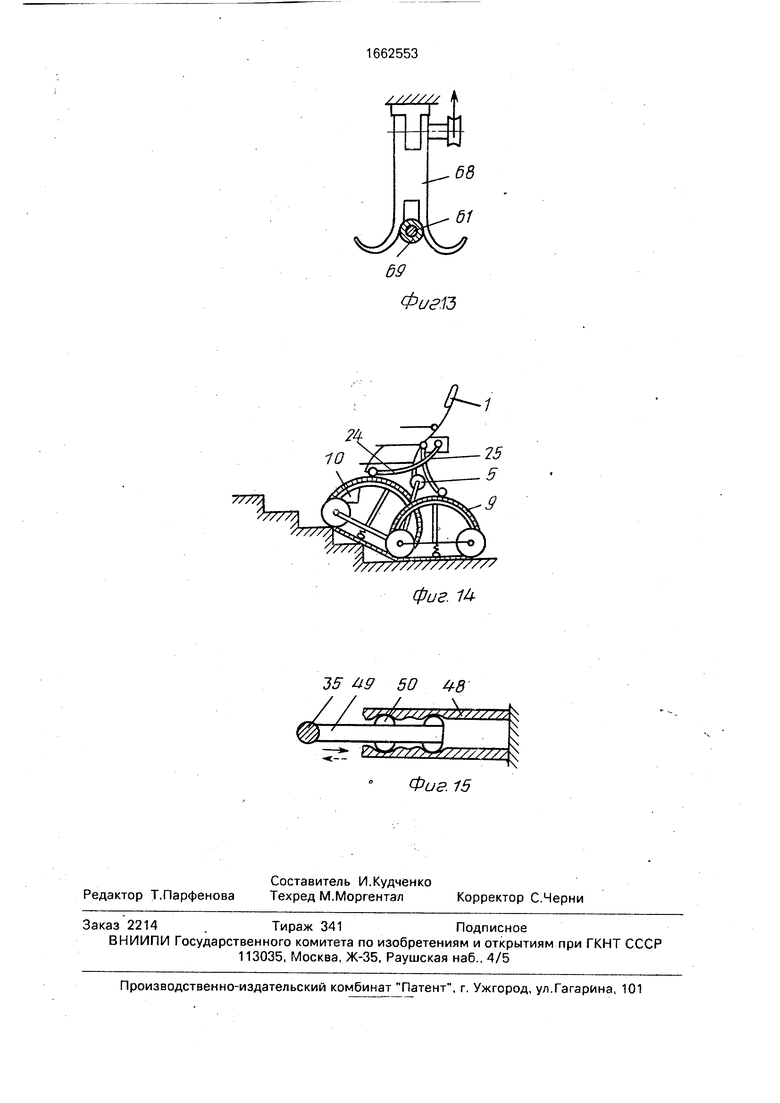
На фиг. 1 изображена предлагаемая коляска, вид сбоку; на фиг. 2 - разрез А - А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - гибкий обод; на фиг. 5 - вариант исполнения гибкого обода на шарнирной цепи в пйперечном разрезе; на фиг. 6 - разрез Б - Б на фиг. 5; на фиг. 7 - коляска на ровной дороге с развернутыми полуколесными блоками; на фиг. 8 - упорный направляющий ролик; на фиг. 9 - коляска на лестничном марше; на фиг, 10 - кинематическая схема вращения колеса без скольжения по нему гибкого обода; на фиг. 11 - кинематическая схема вращения гибкого обода относительно колеса; на фиг. 12 - схема стыковки полуколесных блоков в зоне ведомых роликов; на фиг. 13 - схема механизма удержания карданного вала от вращения вместе с колесом; на фиг. 14 - схема расположения коляски перед подъемом; на фиг. 15 - пружинящий фиксатор
Коляска содержит кресло 1, закрепленное на раме 2, которая опирается на два ведущих колеса 3 и два ведомых колеса 4, привод 5, выполненный в виде электродвигателя, который питается эт аккумуляторов 6, закрепленных под сиденьем 7 кресла,и пульт 8 управления, расположенный на ручке кресла.
Каждое ведущее колесо 3 состоит из полуколесных блоков 9 и 10, заходящих диаметральными сторонами друг за друга и соединенных в поперечной плоскости. Каждый полуколесный блок состоит из гибкого обода 11, охватывающего с возможностью скольжения опорную направляющую 12 полукруглой формы, ведомый ролик 13 и натяжной ролик 14, приводной ролик 15.
Ё
О CS
го ел
СП
со
Натяжной ролик 14 закреплен на пружине 16 с возможностью регулируемого выдвижения посредством винтовой пары 17. При этом ролики 13 и 15 закреплены на вилках 18 с опорами 19 вращения, которые между собой соединены жесткой перемычкой 20, в центре которой имеется ступица 21 полуколесного блока 9. Между ступидей 21 и направляющей 12 имеется поперечная жесткая перемычка 22.
Блоки 9 и 10 закреплены с возможностью расхождения вокруг приводного ролика 15 после разъема блоков в зоне ведомого ролика 13. Для возврата блоков 9 и 10 в исходное рабочее положение служит пружина 23 растяжения, В плоскости каждого блока 9 и 10 над ним расположены соответственно толкатели 24 и 25, являющиеся одновременно крыльями, укрывающими сверху блоки. Толкатели 24 и 25 входят в механизм разведения и соединения полуколесных блоков, выполнены поворотными в плоскости расположения блоков и закреплены на осях 26 и 27 вращения, кине,матиче- ски связанных с электрическим приводом 28, снабженным соответственно редуктором и фиксатором (не показаны), управление которым осуществляется с пульта 8 управления. Толкатели 24 и 25 имеют по концам опорные направляющие ролики 29. Приводные ролики 15 блоков 9 и 10 снабжены приводной осью 30, зашплинтованной с наружной стороны колеса 3 выводным клином 31. Вокруг геометрического центра оси 30 происходит поворот блоков при их разведении. При удалении клина 31 можно снять целиком ведущее колесо 3 с коляски. Механизм разведения и соединения блоков содержит замковый узел, состоящий из замка 32 и ведомых роликов 13, замка 33 ступицы 21 блоков, связанных между собой двуплечим рычагом 34,и привода размыкания 35.
Замок 32 ведомых роликов 13 состоит из оси 36 ролика 13, расположенного на блоке 9, оси 37 ролика 13, принадлежащего блоку 10. При этом ось 36 подпружинена пружиной 38 растяжения, действующей в сторону втягивания оси 36 внутрь ролика 13, а ось 37 подпружинена пружиной 39 в сторону выхода из ролика 13, принадлежащего блоку 9, с внутренней стороны колеса 3. В положении соединения блоков оси 36 и 37 перемещены наружу колеса 3 под действием толкателя 40, укрепленного на шарнирном параллелограмме 41, находящегося под действием мощной растянутой пружины 42, перекрывающей противодействующее усилие пружин 38 и 39.
Через связывающий двуплечий рычаг 34 усилие от толкателя 40 передается на оси 43 и 44 ступиц 21 разных блоков 9 и 10, которые подвигаются во внутреннюю сторону колеса 3, преодолевая действие пружины 45 сжатия и пружины 46 растяжения, смыкая таким образом указанные ступицы, кроме того, соединяясь в осевом направлении с опорой 47 вращения. Таким же образом
0 ролики 13 соединены путем смещения осей 36 и 37, и из блоков 9 и 10 образовано единое колесо 3, которое имеет возможность совместно со всеми замковыми узлами вращаться вокруг геометрической оси
5 колеса 00.
Механизм разведения и соединения содержит также пружинящий фиксатор, выполненный в виде стопорящей вилки 48, взаимодействующей с язычком 49, закрел0 ленным на шарнирном параллограмме 41 и снабженным шариковыми выступами 50 для взаимодействия с соответствующими лунками пружинящих пластин вилки 48.
Для размыкания блоков 9 и 10 служит
5 прив од 35 размыкания осевых связей 51, включающий вилку 52, имеющую возможность зацепления с выступом 53 толкателя 40. Вилка 52 перемещается по направляющей 54, закрепленной на раме 2, посредст0 вом тросового привода 55, действующего от приводного посредством электродвигателя ролика 56, управление вращением которого задействовано с пульта 8 управления.
При переводе вилки 52 вправо толка5 тель 40 отходит от оси 37, последняя перемещается в том же направлении под действием своей пружины 39 и выходит из осевого отверстия ролика 13 блока 9. Таким образом, ролики 13 разных блоков 9 и 10
0 размыкаются ввиду того, что граница контакта осей 36 и 37 переходит на границу раздела роликов 13 по плоскости mn. При этом поворачивается рычаг 34, ослабляя свое действие на оси 43 и 44, пружины 45 и
5 46 которых выводят границу их контакта на ту же плоскость mn. Таким образом, в блоках остаются всего два элемента, удерживающих от расхождения: пружина 23 и фиксирующие положение блоков в их соеди0 нении под действием пружины взаимодействующие упоры 57 и 58.
Разведение блоков осуществляется при включении электропривода 28, поворачивающего оси 26 и 27 вращения в противопо5 ложных направлениях так, что блоки 9 и 10 под действием.толкателей 24 и 25 занимают положение, при котором с дорожным покрытием 59 начинает взаимодействовать часть обода 11, расположенная диаметрально (фиг. 7). При этом, изменяя угол поворота
тол кателей 24 и 25, можно добиться изменения углового расположения кресла 1 относительно рамы 2.
Привод 5 включает электродвигатель 60, соединенный с карданным валом 61 через муфту 62. Вал 61 имеет два угловых перелома, осуществленных через конические зацепления 63 и 64, проведенные внутри корпусов 65 и 66. При этом к корпусу 65 присоединены опора 47 вращения, шарнирный параллелограмм 41 и фиксатор 48. Все названные элементы могут вращаться вместе с колесом 3, при этом средняя часть 67 вала 61 в этом случае вращается в вертикальной плоскости, параллельной плоскостям расположения блоков 9 и 10. Для фиксации положения вала 61 относительно рамы 2 на ней выполнен приводной поворотный ловитель 68, в месте действия которого на валу 61 имеется поворотная муфта 69, которая не препятствует осевому вращению вала 61 при его фиксации относительно рамы (фиг. 13). Управление ловителем осуществляв .я с пульта 8. При включении привода 5 ловитель 68 поворачивается из положения С в положение Д при остановленном в соответственном положении колеса 3, при этом вал 61 останавливается в своем вращении относительно рамы в плоскости, параллельной плоскости вращения колеса 3.
При зафиксированном (фиг. 11) вале 61 вращение колеса 3 целиком становится не- еозможным, при этом вращение вала будет передаваться на приводные ролики 15, за- цепленныес гибким ободом 11, и последний будет перемещаться относительно направляющих 12 подобно гусеничной ленте, что образует гусеничный ход при остановленных жестких связях 22 и 20, которые становятся как бы опорной рамой гусеницы.
В том случае, когда момент сопротивления вращению обода 11 относительно направляющих 12 будет больше, чем момент, необходимый для продвижения коляски по дороге (фиг. 10), то вал 61 будет вращаться с угловой скоростью Шв и с такой же скоростью (DK й)в будет вращаться обод 11 вместе с направляющими 12. Приводные ролики 15 в этом случае относительно гибкого обода 11 не вращаются, их относительная угловая скорость относительно гибкого обода равна гУр 0. Скорость продвижения транспортного средства будет определяться линейной скоростью, реализуемой по окружности большого колеса вместе с ободом V0. ftfe Rr WK Rr.
При остановке вала 61 в его вращении в плоскости, параллельной плоскости ведущего колеса 3 (фиг. 11), посредством включения ловителя 68 вал 61 реализует осевое вращение со скоростью &% . при этом при5 водные ролики 15 вращаются со скоростью (/k. Линейная скорость продвижения коляски будет определяться уравнением Vo (t)r. Угловая скорость вращения гибкого обода 11 относительно опоры вращения будет со0 ставлять
(Ок 0)в
Режим закрепленного вала 61 может возникать и без включения ловителя 68. Дня
5 этого достаточно отрегулировать выход натяжного ролика 14 посредством винтовой пары 17 таким образом, чтобы создаваемое натяжение препятствовало взаимному перемещению направляющей 12 и гибкого
0 обода 11 на определенном уровне дорожных нагрузок. Сверх этого уровня будет наблюдаться проскальзывание обода 11 относительно его направляющих 12. В указанном режиме проскальзывания ролики 15
5 будут приводиться во вращение валом 61. При сложных переменных условиях движения будет иметь место одновременно и осевое вращение вала 61 (вокруг своей оси) и вращение вала 61 в плоскости колеса 3. Та0 ким образом будут реализовываться промежуточные режимы в зависимости от условий движения, что означает реализацию процессов авторегулирования движением коляски.
5Гибкий обод 11 может иметь два варианта конструкции: в виде упругой ленты из резины или другого подобного материала (фиг. 3 и 4) с внутренней поверхностью в виде зубчиков для уменьшения трения по
0 направляющим и лучшего зацепления с таким же образом профилированной поверхностью приводных роликов 15 и в виде роликовой цепи 70 (фиг. 5 и 6), снабженной соединенной с ней резиновой шиной 71.
5 Роликовая цепь 70 взаимодейств ет с зубчатым венцом, выполненным на приводном ролике 15. Вариант применения роликовой цепи придает большую определенность и надежность движению в условиях гусенич0 ного хода.
Коляска используется следующим образом.
Предусмотрено три режима движения 5 транспортного средства при соединенных блоках 9 и 10. Это колесные оежимы быстрого хода, медленного хода и торможения. Также предусмотрено три режима при разъединенных блоках 9 и 10; гусеничный режим подъема,спуска и стоянки.
Колесный режим быстрого хода реализуется при опирании на поддерживающие колеса 4 в хороших дорожных условиях при AT рчг торможенного вала 61 и отсутст- 1 awiMtiLix перемещений гибкого обода 1 I с го направляющей 12 (фиг 10),
тесный режим медленного хода (фиг. 11) реализуется гiyiом перевода ловителя Сю .rs положения С и положение Д которое .водится посредством привода 5 с MI .I . с В упраши 1ия Режим используется дл1- лрсодолеп /ш препятствий в виде подъемок. Реализуется пл малой скорости и характеризуется тем, что а нем исключается Ьысфыи разгон коляски при откатке назад а случае отказа привода, что повышает безопасность движения
Колесный р зжмгл гсрможония реализуете , теми же деис гъиями чти и првдыду щий, но НгЗ затяжных для т/ичвидацим BOO ложною оплг.ного он-гона плгч-ки.
Гусеничные рекимы ревизуются голь : , 94 пяхожаенми ЬРЛЗ 51 между усиками ,пя 68 (фи -i) порядок включения ч j г юго описан.
t yre 1ичнь-(| ;л подъема 5 использу... i , ГЛЗВННМ , дл;., ,1р8ОДОЛвНМР
чругых препякмоий и, в частности, для преодоления лестничных -мршрй оаз ледения блоков посредством толкателзй 4 и 25 onviridh. Путем остулиооики углового взаимного рпгпг/лпженпг1 т ОЛКЗТОЛРЙ 24 5 с пульта 8 Ч Прявпснпя посргдст и привода 28, реалису. отдптьчый лонирт каждого толкателя, .можно доЬьнлтьом благо ipn THOfо уело.) о ;гюлож ими кресла , относительно уроз ; чорои-i При пхо/:е на оодъем (фиг. 14) ft илизустся уловие pscr-c лсльние бло.-ив 9 и (0 по профилю перелома, в дяльн ти Пьм их положение
выравнивается, и нижние стороны блоков располагаются по прямой линии (фиг. 11).
Режим спуска не отличается от режима подъема, только вся коляска разворачиваетсяна180°.
Формула изобретения Коляска, содержащая раму с сиденьем, ведущим и ведомым колесами и приводом, связанным с ведущими колесами, о т л и ч а
ю щ а я с я тем, что, с целью повышения безопасности при перемещении по поверхностям с различным профилем за счет обеспечения автоматического регулирования положения движителя в зависимости от
профиля, каждое ведущее колесо выполнено в виде двух полуколесных блоков, связанных между собой механизмом их разведения и соединения, а каждый полуколесный блок выполнен в виде опорной направляющей полукруглой формы с размещенными на ее концах приводным и ведомым роликами, опоры вращения которых соединены жесткой перемычкой, снабженной ступицей и подпружиненным
натяжным роликом, имеющим возможность взаимодействия с внутренней поверхно- сгоЮ замкнутой гибкой связи совместно с направляющей и приводным и ведомым роликами, при этом ведомые ролики и ступицы
полуколесных блоков каждого ведущего колеса связаны соответствующими осями, кинема гически соединенными с приводом, а механизм разведения и соединения полуколесных блоков выполнен в виде закрепленных на раме с возможностью фиксации и поворота толкателей, имеющих возможность взаимодействия с соответствующим полуколесным блоком, и замкового узла, состоящего из замка ведомых роликов и замка
С1упмцы, связанных между собой двуплечим рычагом,
69
/// /л
/ -5Пф
к 4
/// /// /// /// /// /м /// ///
1г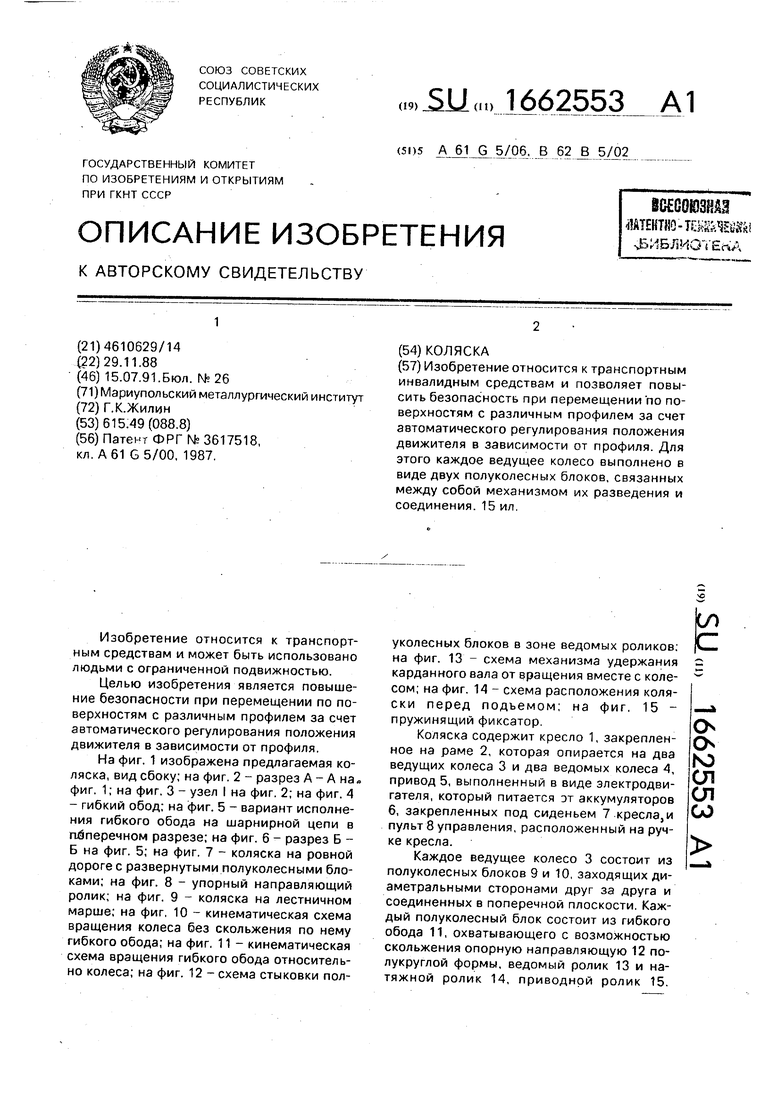

| название | год | авторы | номер документа |
|---|---|---|---|
| Кресло-коляска | 1988 |
|
SU1572619A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА ИНВАЛИДНОГО КРЕСЛА-КОЛЯСКИ | 1995 |
|
RU2116774C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2004 |
|
RU2274577C1 |
| Инвалидная коляска | 1988 |
|
SU1629058A1 |
| СРЕДСТВО ПЕРЕДВИЖЕНИЯ | 2005 |
|
RU2286121C1 |
| Коляска для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688288C1 |
| Коляска с функцией подъёма по лестницам для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688289C1 |
Изобретение относится к транспортным инвалидным средствам и позволяет повысить безопасность при перемещении по поверхностям с различным профилем за счет автоматического регулирования положения движителя в зависимости от профиля. Для этого каждое ведущее колесо выполнено в виде двух полуколесных блоков, связанных между собой механизмом их разведения и соединения. 15 ил.
Ј992991
А-А
51
27 26 5k 55 56 28
if ЈQ 34- Эй 3D /0
л
i
/
Фиг. 2
L глф У/ /// /// /// ////// s// /// /// /// /л
u
S
9-9
5 5Пф
C99S991
Oi
17 2Пф
с- СО
со
I
CD u-
LJ Й
////// А
Фе/е13
фиг. 1k
| Патент ФРГ №3617518, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
