Модуль колесно-гусеничного движителя.
Изобретение относится к движителям транспортных средств повышенной проходимости.
Известна ходовая часть транспортного средства ИЗ №2507102, МПК B62D 55/04 (2006.01), A61G 5/06 (2006.01), содержащая установленное на оси колесо, балансир, установленный на оси колеса, опорные катки, установленные на свободных концах балансира, и бесконечную ленту (гусеницу), охватывающую опорные катки. Ведущее колесо выполнено составным из двух колес, конструктивно и технологически однотипных, с ободом и ступицей, принадлежащих разным плоскостям. Между ступицами колес на общей бортовой оси смонтирована ведущая звездочка привода бесконечной ленты, охватывающей на верхнем одинаковом уровне горизонта верхние точки катков и звездочки привода ленты.
Недостатками данного изобретения является невозможность раздельного использования колесного и гусеничного движителей при креплении к шасси транспортного средства.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение конструктивных и эксплуатационных качеств, обусловленное соединением колесного и гусеничного движителей в один узел, с возможностью одновременного и раздельного их использования при креплении модулей к шасси транспортного средства.
Данная задача решается за счет следующего: модуль колесно-гусеничного движителя, содержит колесный и гусеничный движители в одном узле, при этом на валу (оси) колесного движителя установлены с возможностью вращения один на другой приводной полый вал ведущего зубчатого колеса гусеничного движителя и полый вал, установленный на подшипник в кронштейне для крепления к раме транспортного средства, с фланцем, образующим одно целое с держателем корпуса гусеничного движителя; на валу с фланцем установлено средство для амортизации гусеничного движителя, присоединенное к кронштейну; гусеничный движитель установлен на вал ведущего зубчатого колеса с возможностью поступательного и вращательного движений с помощью пазов в корпусе; при перемещении корпуса и держателя относительно друг друга остановка осуществляется фиксирующим устройством, а торможение и остановка гусеницы обеспечиваются тормозным средством.
Техническими результатами являются следующие эффекты:
- конструктивно модуль представляет собой узел, совмещающий функции колесного и гусеничного движителей и является законченной составной частью транспортного средства;
- конструктивно обеспечивается взаимозаменяемость деталей левого и правого исполнения модуля по присоединению к транспортному средству, т.е. составные части самого модуля имеют модульные свойства;
- каждому типоразмеру колесного движителя (диаметр, ширина, вид: с электроприводом, мотор-колесо, интегрированная подвеска "Softwheel") может соответствовать несколько типоразмеров гусеничного движителя с разной длиной и высотой;
- модули колесно-гусеничного движителя в транспортном средстве дают возможность двигаться по ровной твердой поверхности на колесах, по мягкому грунту - на гусеницах.
Возможность одновременного и раздельного использования колесного и гусеничного движителей в модуле при креплении к транспортному средству обеспечивается способностью гусеничного движителя перемещаться относительно вала (оси) колесного движителя и способностью колесного движителя вместе с кронштейном перемещаться относительно гусеничного движителя при опоре на гусеницу.
Достижение этой целей возможно только при свободных поворотах относительно оси колесного движителя и друг друга валов ведущего зубчатого колеса и корпуса гусеничного движителя, а также взаимной их поступательной подвижности с помощью пазов в корпусе гусеничного движителя, вал которого установлен на подшипнике в кронштейне.
Сущность изобретения поясняется чертежами, на которых изображено:
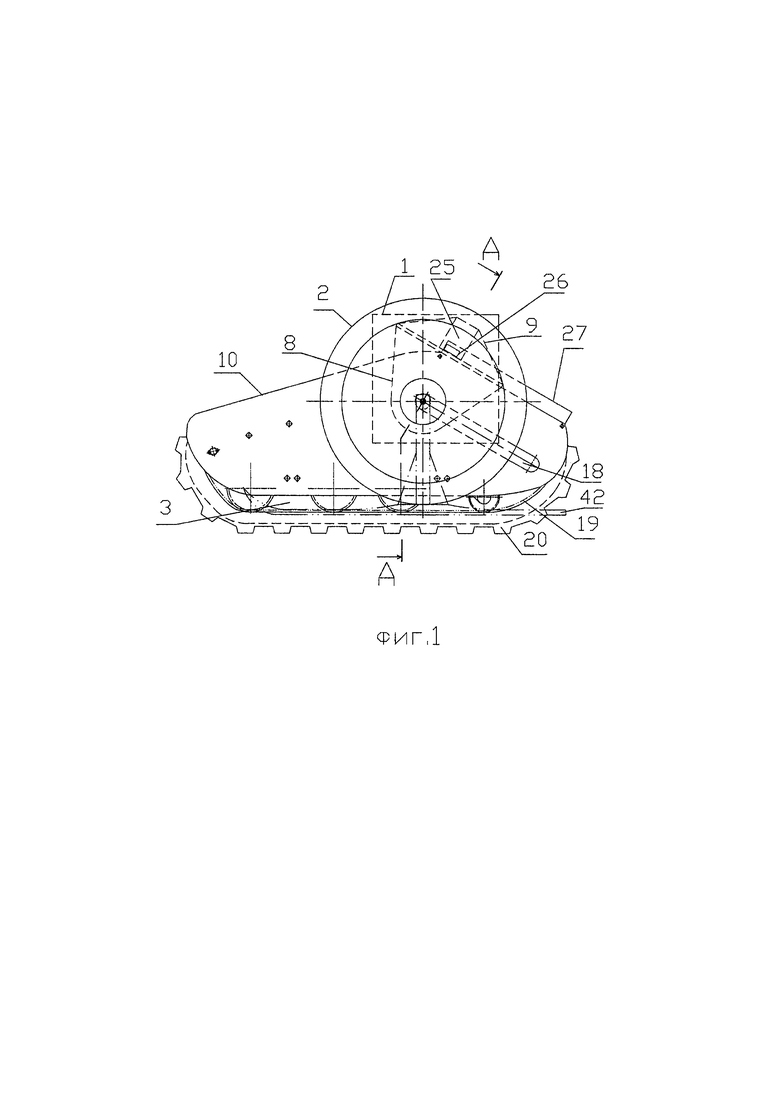
на фиг. 1 показан общий вид модуля слева;
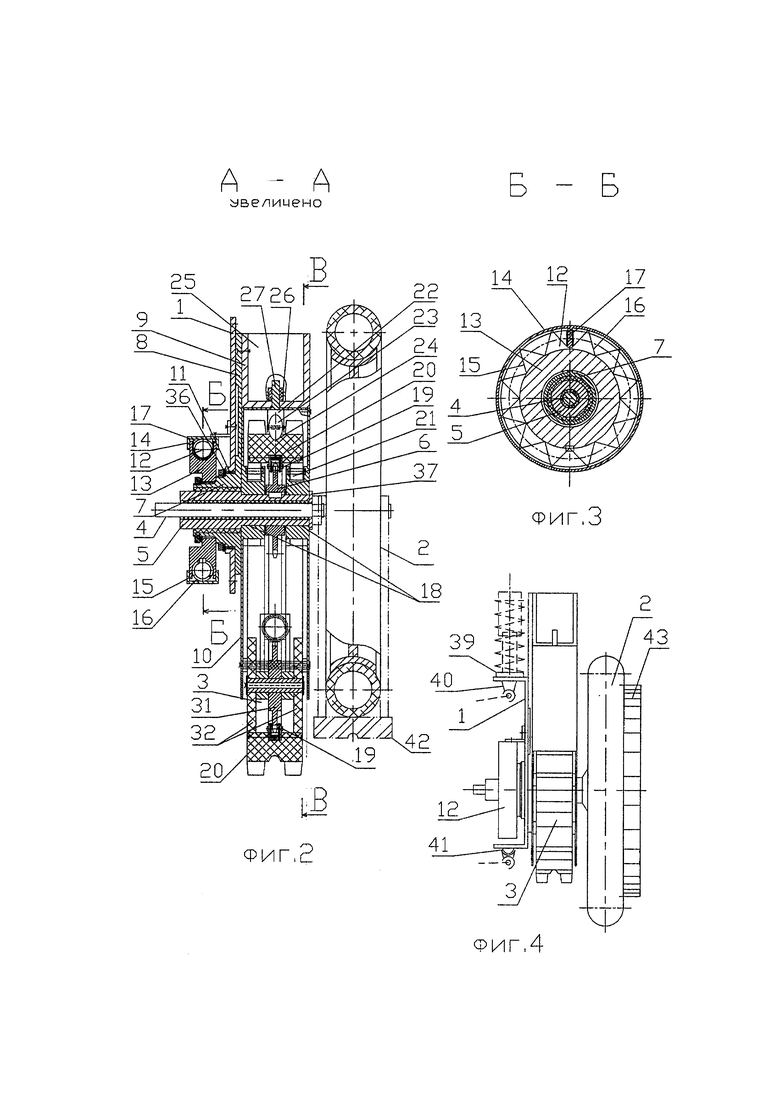
на фиг.2 - разрез А - А;
на фиг. 3 - разрез Б - Б (средство 12 для амортизации гусеничного движителя 3);
на фиг. 4 - управляемый поворотный модуль;
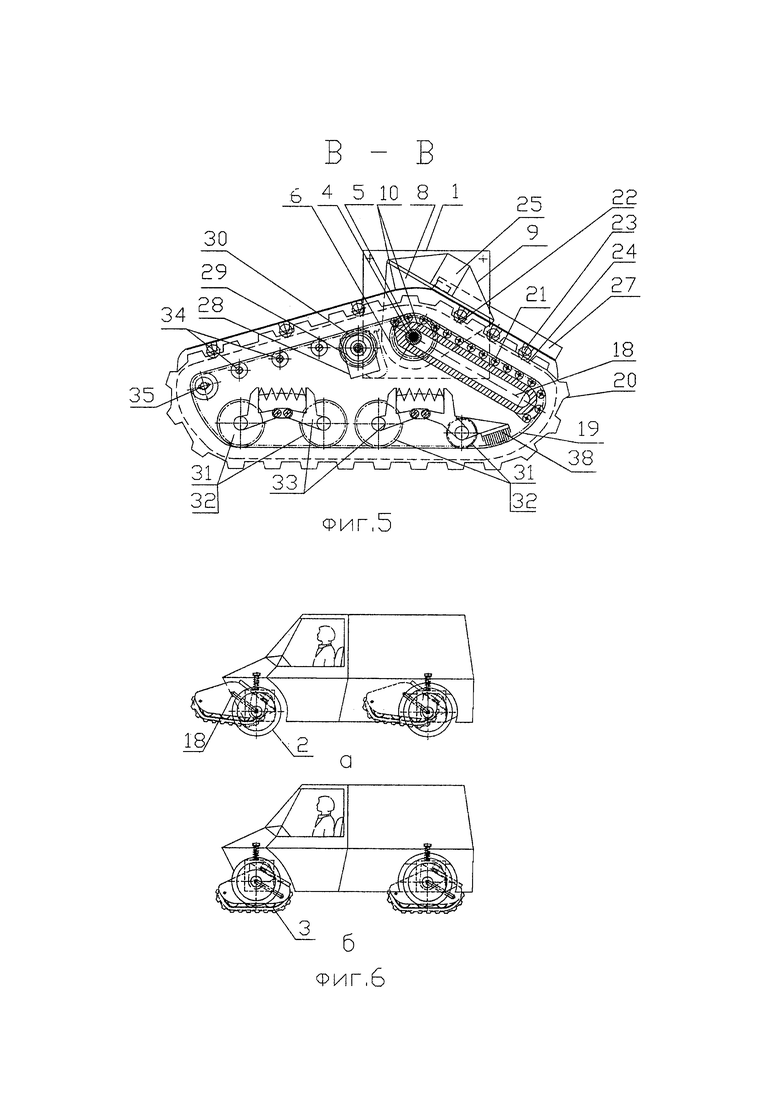
на фиг. 5 - разрез В-В;
на фиг. 6 - использование модулей в транспортном средстве повышенной проходимости.
Модуль колесно-гусеничного движителя содержит кронштейн 1 для крепления к раме транспортного средства, колесный, движитель 2, гусеничный движитель 3 (фиг. 1). На валу (оси) 4 колесного движителя 2 установлены с возможностью вращения один на другой приводной полый вал 5 ведущего зубчатого колеса 6 (в частности, звездочки) гусеничного движителя 3 и полый вал 7, установленный на подшипник 11 в кронштейне 1, с фланцем 8 для крепления держателя 9 корпуса 10 гусеничного движителя 3 (фиг. 2). На валу 7 установлено средство 12 для амортизации (фиг. 2 фиг. 3) (в частности, не регулируемой, состоящее из внутренней обоймы 13, закрепленной на валу 7 и внешней обоймы 14, закрепленной к кронштейну 1, имеющими внутри, закрепленные одним концом к внутренней обойме 13, две цилиндрические пружины 15, 16 сжатия разнонаправленного действия, а другим концом упирающиеся в выступ 17 наружной обоймы 14) гусеничного движителя 3 и его удержания в горизонтальном положении.
Гусеничный движитель 3 установлен на вал 5 с возможностью поступательного и вращательного движений с помощью пазов 18 в корпусе 10. Звездочка 6 входит в зацепление с цепью 19, закрепленной на гусенице 20, которая прижимается к опорным роликам 21 с помощью прижимного средства 22 (в частности, состоящим из прижимных роликов 23 и желоба 24 на гусенице 20), создавая надежное зацепление звездочки 6 с цепью 19 (фиг. 2, фиг. 5).
При перемещении корпуса 10 и держателя 9 относительно друг друга остановка осуществляется фиксирующим устройством 25 (в частности, состоящим из суппорта 26, прикрепленного к держателю 9 и планки 27, соединенной с корпусом 10), а возможность торможения и остановки гусеницы 20 обеспечивается тормозным средством 28 (в частности, парой: тормозным суппортом 29 и звездочкой 30) (фиг. 2, фиг. 5).
Передача энергии для срабатывания фиксирующего суппорта 26 и тормозного суппорта 29 осуществляется от встроенных источников питания (на чертеже не показаны) или по гибким каналам передачи энергии от источника питания на транспортном средстве.
В корпусе 10 смонтирована упругая подвеска гусеничного движителя 3 (в частности, балансирная, с зубчатыми колесами 31;между опорными катками 32, объединенными между собой попарно в каретки 33). Гусеницы 20 опираются на поддерживающие ролики 34 и натяжные звездочки 35 (фиг. 5).
Свободный поворот фланца 8 относительно кронштейна 1 обеспечивается необходимой толщиной регулировочной шайбы 36 (фиг. 2).
Свободный ход корпуса 10 и фланца 8 относительно друг друга регулируется толщиной шайбы 37 при отсутствии осевого смещения вала 7 (фиг. 2) в раздаточной коробке 57 от привода 56 в случае присоединения модуля к транспортному средству (фиг. 8).
К рычагу каретки 33 крепится щетка 38 для очистки внутренней поверхности гусениц 20 от грязи (фиг. 5).
На корпусе 10 в местах входа гусеницы 20 закреплены щетки (на чертеже не показаны) для очистки от грязи грунтозацепов и боковин гусеницы 20 и желоба 24.
У поворотных управляемых модулей кронштейн 1 выполняется, как поворотный кулак независимой подвески с присоединительным элементом 39 для установки амортизатора и пружины, элементом 40 для крепления рулевой тяги и элементом 41 для крепления рычага подвески (фиг. 4).
При использовании модуля в транспорте с амфибийными свойствами к ободу колесных движителей 2 крепится средство отталкивания от воды 43 (в частности, крыльчатка) (фиг. 4).
Работают модули следующим образом:
1. Использование модулей в транспортном средстве повышенной проходимости (фиг. 6).
Рама транспортного средства выполняется с учетом поворота управляемых модулей. Задние модули присоединяются к раме на упругой подвеске. Валы 4 и 5 управляемых и задних модулей присоединяются к раздаточным коробкам 57 от приводов 56, которые сочленены с помощью карданных валов 60 и шарниров (аналог см. фиг. 11). Фиксирующие устройства 25 и тормозные средства 28 подключаются к встроенным источникам питания или по гибким каналам передачи энергии от источника питания на транспортном средстве.
Движение на колесных движителях осуществляется по дорогам с твердым покрытием (фиг. 6а), на гусеничных движителях - по мягким грунтам (фиг.6б). Переход транспортного средства с колесного хода на гусеничный осуществляется следующим образом. Приводы 56 выключены. Фиксирующие устройства 25 выключены, тормозные средства 28 включены. Включаются приводы 56 и через раздаточные коробки 57 и валы 5 передается крутящий момент к ведущим колесам 6. Гусеничные движители 3 с помощью пазов 18 опускаются вниз, поднимая транспортное средство.
2. Использование модулей в транспортном средстве двойного назначения (для движения на гусеницах по земле и на колесах по железнодорожному пути).
Конструктивная схема транспорта двойного назначения при использовании модулей и их работа аналогична п. 1. При этом, модули оборудуются колесными движителями 2, поверхность качения которых выполняется аналогично поверхности качения железнодорожного колеса.
3. Использование модулей в снегоходном транспортном средстве.
Конструктивная схема снегоходного транспорта при использования модулей и их работа аналогична п. 1. На колесные движители 2 или оси 4 крепятся лыжи 42 (фиг. 1, фиг. 2). При этом, весовая нагрузка на гусеницы 20 и лыжи 42 распределяется оптимально для данной плотности снежного покрова при достижении гусеничными движителями 3 необходимой для движения тяговой силы. Для движения по льду гусеницы 20 могут быть оборудованы цепляющимися за лед шипами.
Использование модуля движителя в разных машинах потребует для его изготовления различных металлов, пластмасс и других материалов, применение которых обосновывается расчетами.
Шасси с двумя модулями.
Изобретение относится к шасси транспортных средств повышенной проходимости, в том числе кресел-колясок ступенькоходов.
Известно колесно-гусеничное шасси у электрической коляски Scewo Вrо швейцарской фирмы ScewoAG (https://www.scewo.ch/bro/), содержащее раму с механизмом, опускающим кресло по направляющим рамы, левый и правый электроприводные колеса, управляемые с помощью гиростабилизирующей системы, позволяющей поддерживать баланс пользователю коляски, левый и правый гусеничные движители на раме с гидроцилиндром для поднятия сидения в горизонтальное положение при движении на гусеницах задним ходом по лестницам, опорные выдвигающиеся колеса, необходимые для перехода со ступеней лестниц на горизонтальную площадку и подъема кресла. Коляска может попеременно двигаться на колесах и гусеницах. Scewo bro автоматически поддерживает горизонтальное положение кресла во время движения на колесах по горизонтальным и с небольшим продольным уклоном поверхностям, но не имеющим поперечного уклона. Управление коляской осуществляется пользователем с пульта.
Недостатками шасси данной конструкции являются: отсутствие поддержки горизонтальности рамы (кресла) при движении на гусеницах по поверхностям с поперечным уклоном; низкая проходимость на гусеницах, связанная с маленьким клиренсом.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение эксплуатационных качеств шасси, связанных с расширением области применения, с возможностью двигаться на гусеницах по поверхности с определенным поперечным уклоном, преодолевать определенной высоты неровности поверхности, сохраняя горизонтальность рамы (кресла); с увеличением высоты подъема рамы (кресла); с повышением проходимости, с потенциалом для применения упругой подвески модуля движителя; с потенциалом для придания транспортному средству на заявленном шасси амфибийных качеств.
Данная задача решается за счет следующего.
Шасси с двумя модулями, содержит модули колесно-гусеничных движителей, закрепленные к раме шасси слева и справа, при этом колесные движители модулей управляются с помощью гиростабилизирующей системы, позволяющей поддерживать баланс пользователю транспортного средства на этом шасси. В одном модуле между средством для амортизации гусеничного движителя и кронштейном или рамой устанавливается стабилизатор горизонтального положения рамы, взаимодействующий с датчиком положения; к раме крепится выдвигающееся средство от опрокидывания шасси и для подъема рамы.
Техническими результатами.являются следующие эффекты:
- возможность применения на шасси различных типоразмеров модулей колесно-гусеничных движителей расширяет область применения шасси для различных транспортных средств;
- сохранение горизонтального положения рамы (кресла) при движении на гусеницах вдоль и поперек склона и при преодолении неровностей;
- увеличение высоты подъема рамы (кресла);
- повышение проходимости.
Возможность применения на шасси различных типоразмеров модулей обусловливается универсальной конструкцией модулей.
Сохранение горизонтального положения рамы (кресла) при движении транспортного средства на гусеницах вдоль уклона осуществляется с помощью стабилизатора. Сохранение горизонтального положения рамы (кресла) при движении транспортного средства на гусеницах поперек уклона осуществляется с помощью стабилизатора и выставления гусеничных движителей на разные высоты относительно рамы.
Увеличение высоты подъема рамы (кресла) осуществляется под воздействием выдвижного средства для подъема рамы с помощью способности гусеничных движителей поворачиваться на валу ведущих зубчатых колес, опираясь на поверхность.
Повышение проходимости достигается увеличением клиренса при движении на гусеницах в результате освобождения пространства под коробчатой рамой от конструктивных элементов. Максимальный клиренс образуется в результате опускания в крайнее нижнее положение гусеничных движителей, используя пазы в их корпусах, по валам ведущих звездочек.
Легко достигаемая конструктивно герметичность коробчатой рамы позволяет преодолевать неглубокие водные преграды, а при дооборудовании шасси понтонами двигаться по спокойной воде, используя крыльчатку на ободах колесных движителей.
Возможность преодолевать задним ходом на гусеницах ступени и бордюры выше стандартных обеспечивается с помощью средства против опрокидывания.
Плавность хода шасси может быть увеличена креплением к раме модулей на упругой подвеске.
Сущность изобретения поясняется чертежами, на которых изображено:
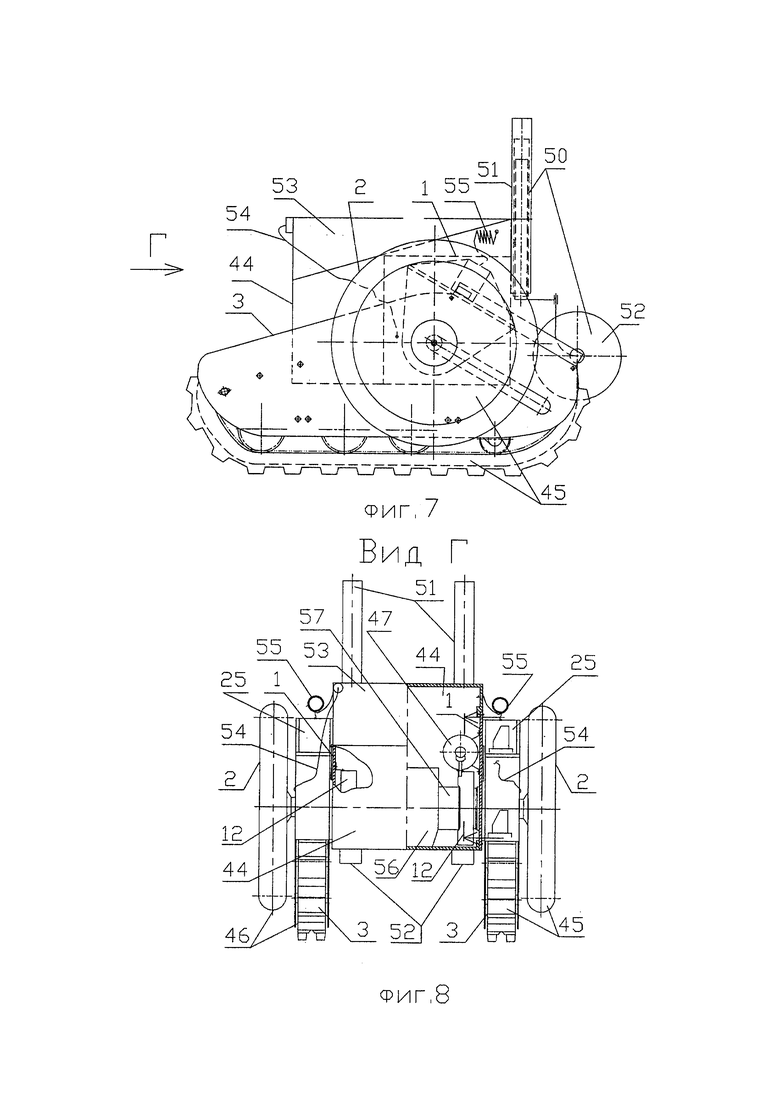
на фиг. 7 показан общий вид шасси слева;
на фиг. 8 - вид Г;
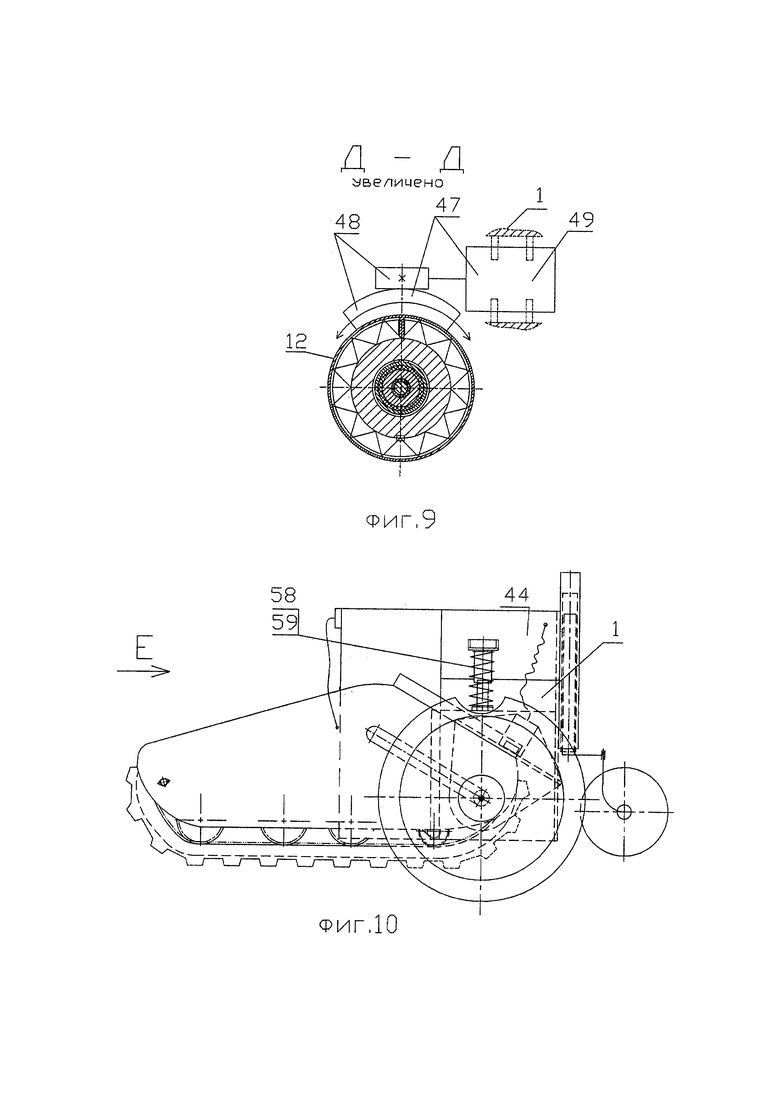
на фиг. 9 - разрез Д - Д;
на фиг. 10 - креплением к шасси модулей на упругой подвеске;
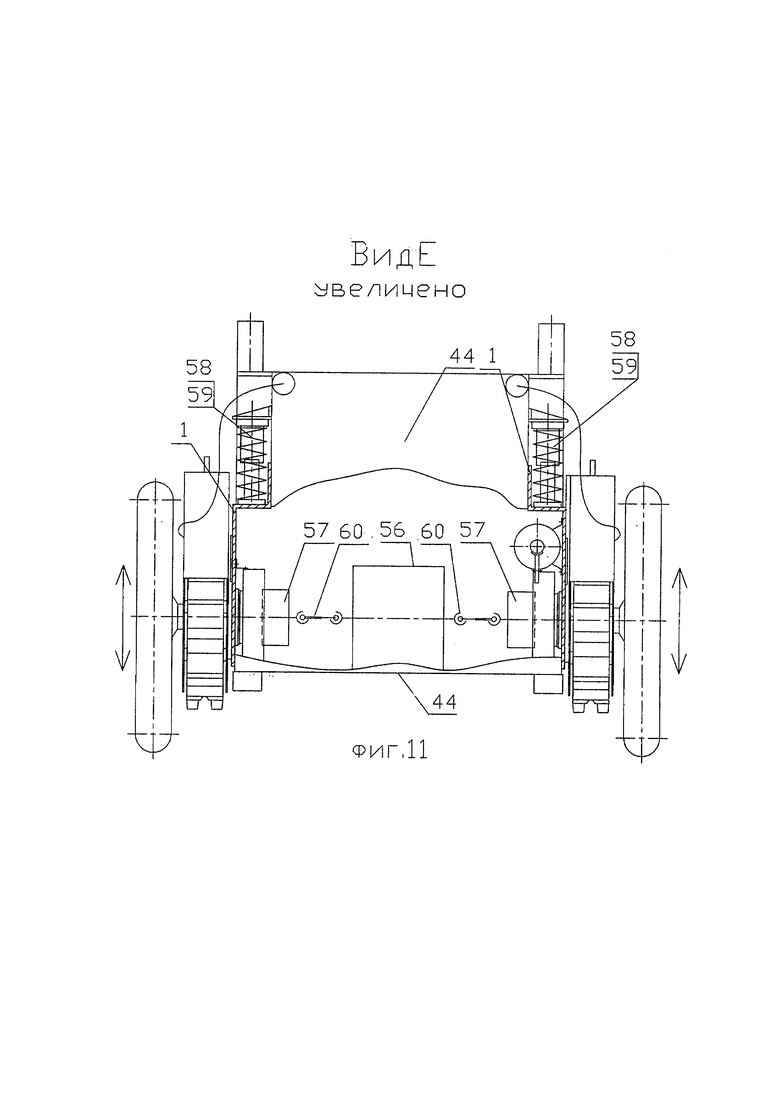
на фиг. 11 - вид Е;
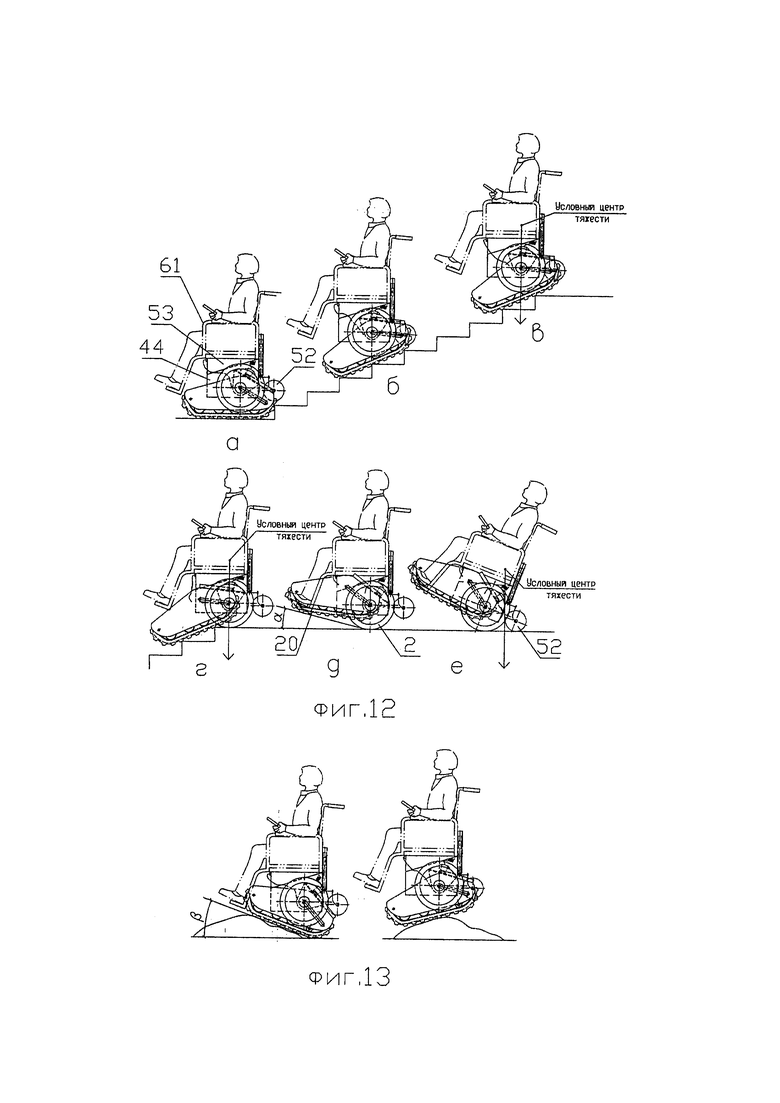
на фиг. 12 - использование шасси в коляске при движении по лестничному маршу;
на фиг. 13 - преодоление неровностей поверхности коляской на гусеницах;
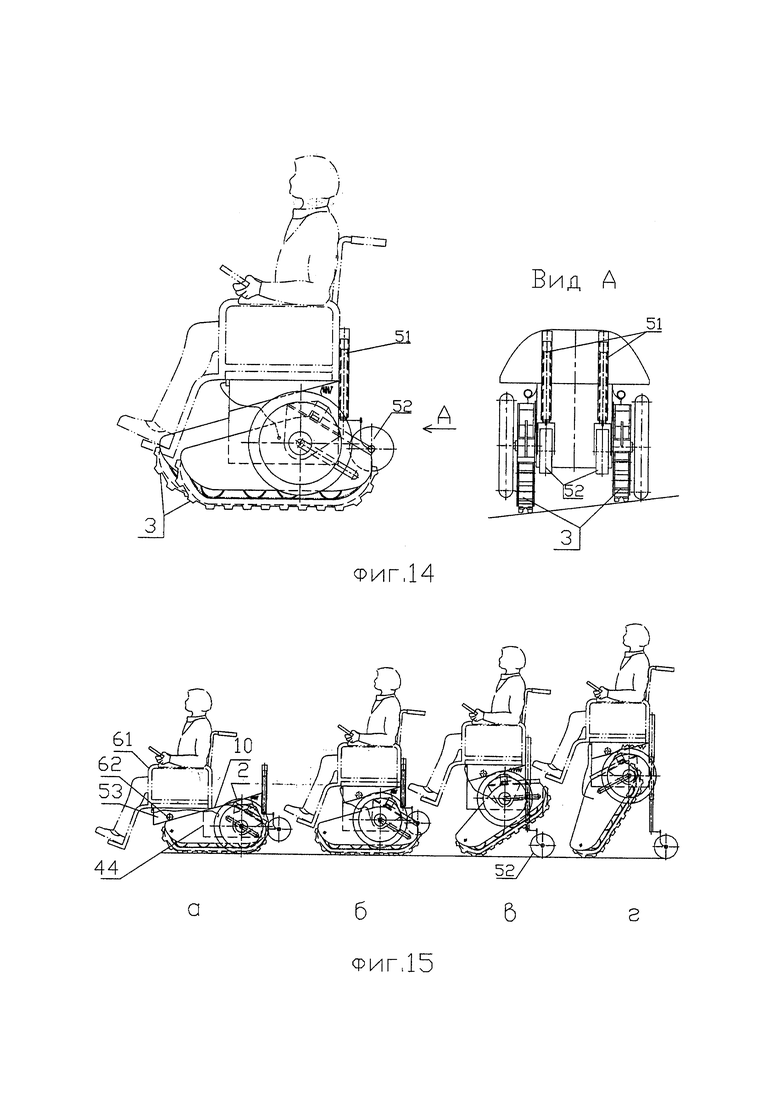
на фиг. 14 - преодоление поверхности с поперечным уклоном коляской на гусеницах;
на фиг. 15 - варианты подъем (опускания) кресла;
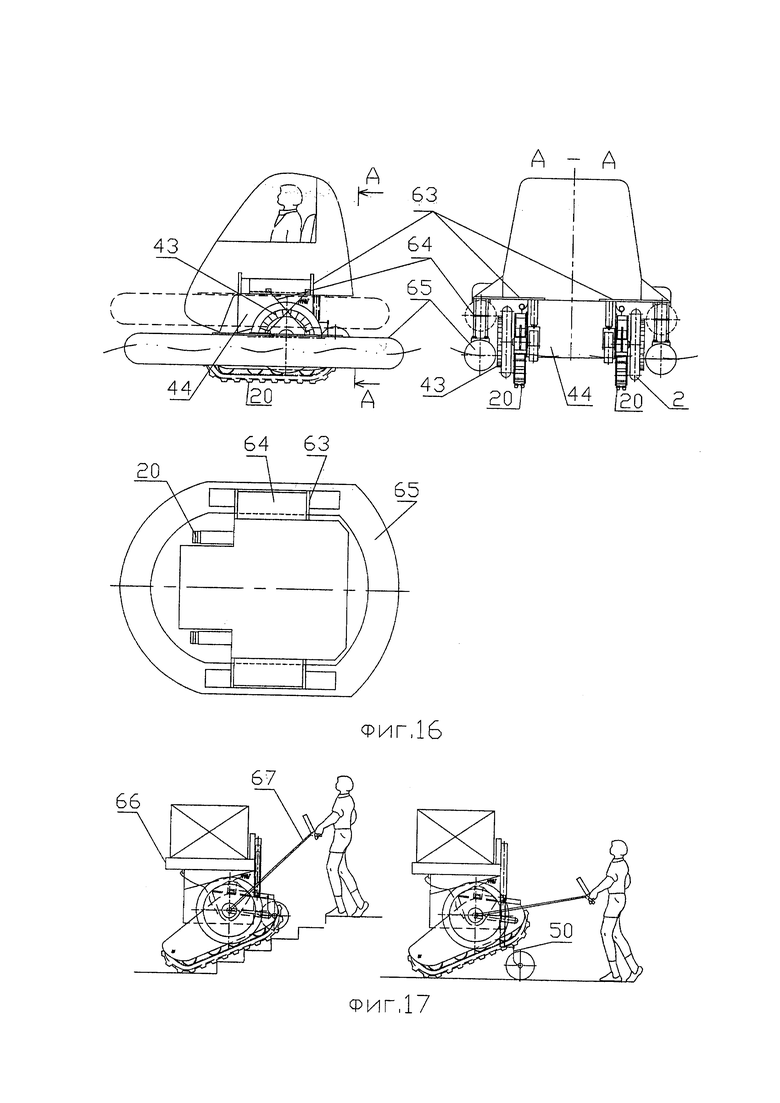
на фиг. 16 - использование шасси в транспортных средствах повышенной проходимости с амфибийными возможностями;
на фиг. 17 - использование шасси в грузовых подъемно-транспортных средствах;
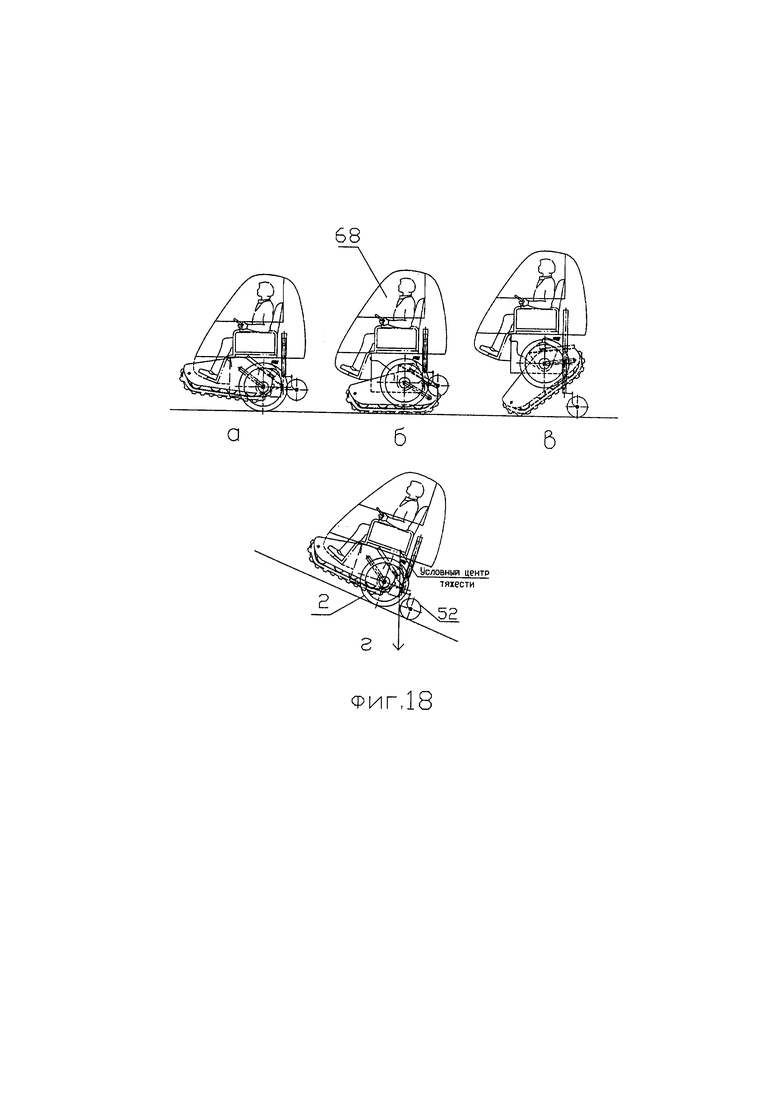
на фиг. 18 - использование шасси в легковых транспортных средствах повышенной проходимости.
Шасси с модулями колесно-гусеничного движителя, содержит раму 44 (фиг. 7, фиг. 8), прикрепленные к ней на кронштейнах 1 левый модуль 45 и правый модуль 46, при этом колесные движители 2 управляются с помощью гиростабилизирующей системы, позволяющей поддерживать баланс пользователю транспортного средства на этом шасси. В одном модуле (45) между средством 12 для регулируемой амортизации гусеничного движителя 3 и кронштейном 1 устанавливается стабилизатор 47 (фиг. 9) (в частности, червячная пара 48 с сервоприводом 49) горизонтального положения рамы 44, взаимодействующий с датчиком положения (на чертеже не показан). К раме 44 крепится выдвигающееся средство 50 (в частности, гидроцилиндры 51 с колесами 52, закрепленными к штокам) от опрокидывания шасси и для подъема рамы 44, имеющую коробчатую форму с подвижной верхней частью 53. Гибкие каналы 54 и 55 передачи энергии от ее источников в раме 44 для срабатывания фиксирующих устройств 25 и тормозных средств 28 проходят через стенки коробчатой рамы 44 (фиг. 7, фиг. 8).
Крутящий момент от привода 56 к колесным движителям 2 и гусеничным движителям 3 распределяется коробками 57 (фиг. 8).
Крепление модулей 45 и 46 к раме 44 может осуществляться на упругих подвесках (в частности, между кронштейнами 1 и рамой 44 устанавливаются амортизаторы 58 и пружины 59, а между приводом 56 и коробками 57-сочлененные карданные валы 60) (фиг. 10, фиг. 11)
Работает шасси с двумя модулями следующим образом:
1. Использование шасси с модулями в креслах-колясках (далее - коляска) для людей с ограниченными возможностями (далее - пользователи) (фиг. 12 - фиг. 15).
К подвижной части 53 крепится кресло 61. На раме 44 комплектуется все необходимое для безопасной и удобной эксплуатации коляски пользователем (фиг. 12а). Управление коляской может осуществляться пользователем с помощью пульта на подлокотнике кресла.
При управлении коляской на электроприводных колесных движителях 2 (режим К) (фиг. 12д) используется гиростабилизирующая система, а на гусеничных движителях 3 (режим Г) (фиг. 12а) - стабилизатор 47 горизонтального положения рамы 44.
Переход из режима К в режим Г.
Отключается гиростабилизирующая система коляски и включается стабилизатор 47 горизонтального положения рамы 44. Движители 3 наклоняются и передней частью касаются опорной поверхности. Кресло 61 остается в горизонтальном положении. С помощью устройств 25 разблокируются положения корпусов 10 относительно держателей 9 (далее - устройства 25 вык(вк)лючены), при этом включаются тормозные средства 28, блокируя движение гусениц 20 (далее - средства 28 вк(вык)лючены), включается реверс привода звездочек 6 и движители 3 используя пазы 18 опускаются до касания гусеницами 20. всей длиной опорной поверхности. Затем рама 44 поднимается вверх до конца пазов 18 (фиг. 12а).
Движение коляски и преодоление передним ходом подъемов и неровностей в режиме К: устройства 25 включены, средства 28 включены на торможение (для смягчения случайного наезда гусеницами на препятствие), включается колесный движитель 2 и гиростабилизирующая система. Наибольший угол преодолеваемого подъема при сохранении горизонтальности кресла 61 равняется углу α, образованному касательной от колесных движителей 2 к нижней ветви гусениц 20 и горизонталью (фиг. 12д).
Движение коляски в режиме Г:
- подъем коляски на лестницу (фиг. 12). Средство 12 регулируется на увеличение жесткости амортизации гусеничного движителя 3 для предотвращения раскачивания кресла 61. В исходном положении коляска с пользователем в кресле стоит на гусеницах 20 задней стороной у первой ступени лестничного марша (фиг. 12а). Устройства 25 включены, а средства 28 выключены, включается задний ход и ведущие звездочки 6, воздействуя на цепи 19, прикрепленные к гусеницам 20, поворачивают их, приводя в соприкосновение со ступенью. Вследствие сил трения грунтозацепов гусениц 20 о ступени, гусеничные движители 3 поворачиваются на угол подъема лестничного марша. По мере поворота, по сигналу датчика горизонтального положения, стабилизатор 47 поддерживает в горизонтальном положении раму 44. Таким, образом, подъем по лестнице совершается при горизонтальном положении кресла 61 (фиг. 12б). При достижении коляской положения, когда ее центр тяжести находится над последней ступенью, отключаются приводы ведущих звездочек 6, а средства 28 включаются. Коляска силами трения гусениц 20 о ступени фиксируется на лестнице (фиг. 12в). Устройства 25 выключаются, включается привод ведущих звездочек 6. Рама 44 с пользователем в кресле,61 плавно сдвигаются по пазам 18 назад до упора, располагая центр тяжести коляски с пользователем над горизонтальной площадкой (фиг. 12г). Устройства 25 включаются, а средства 28 выключаются, включается задний ход. Коляска выезжает на площадку, опираясь на нее передней частью гусениц 20 и колесными движителями 2. Средства 28 включаются. Движители 3 поднимаются до крайнего верхнего положения, выключается привод ведущих звездочек 6. Коляска переходит в режим К (фиг. 12д). В режиме К при сбое гиростабилизирующей системы опрокидывание коляски назад предотвращается опорой на колеса 52 (фиг. 12е), а вперед - опорой на движители 3. На любой фазе движения коляска может переходить с автоматического на ручное управление. Произвольное начало движения коляски вниз должна блокировать предусмотренная автоматика системы безопасности - тормозные средства 28 включаются, предотвращая неконтролируемый спуск. Коляска силами трения гусениц 20 о ступени фиксируется на лестнице. Спуск с лестницы пользователем на коляске осуществляется в обратной последовательности;
- торможение коляски при движении осуществляется плавным увеличением тормозного усилия, обеспечиваемого тормозным средством 28;
- преодоление коляской неровностей поверхности передним ходом и подъем по поверхности с уклоном (фиг. 13). Устройства 25 включены и средства 28 выключены. При движении сохраняется горизонтальность кресла 61, которая поддерживается работой стабилизатора 47. Высота неровностей не должна превышать расстояния от подставок для ног до плоскости движения. Угол преодолеваемого подъема равняется углу β наклона движителей 3 к горизонтали, при условии положения подставки для ног выше нижних ветвей гусениц 20. При допустимом подъеме подставки для ног характеристики преодоления препятствий и уклонов улучшаются;
- движение коляски поперек наклонной поверхности (фиг. 14). Устройство 25 выключено, а средство 28 включено со стороны, обращенной к подъему поверхности. Включается привод ведущей звездочки 6 со стороны, обращенной к подъему поверхности, и движитель 3 поднимается по пазу 18 вверх на высоту, необходимую для сохранения горизонтальности сидения 61.
- повороты осуществляются с помощью регулирования разности скорости движения гусениц 20. Разворот на месте осуществляется вращением гусениц 20 в противоположных направлениях.
Подъем вверх и опускание вниз кресла 61 в горизонтальном положении (фиг. 15):
- исходная позиция коляски в режиме Г (фиг. 15б);
- опускание в нижнее положение. Устройства 25 выключены, средства 28 включены. Включается привод ведущих звездочек 6 и осуществляется опускание колесных движителей 2 на опорную поверхность. Из стенок верхней части 53 рамы 44 выдвигаются ролики 62, опираясь которыми на корпуса 10, верхняя часть рамы 53 перемещается вперед и вниз. Кресло 61 занимает нижнее горизонтальное положение (фиг. 15а). Приводы верхней части 53 и выдвижения роликов 62 не показаны;
- подъем вверх (фиг. 15в). Устройства 25 включены, гидроцилиндры 51 выдвигают колеса 52 на опорную поверхность. При этом движители 3 поворачиваются на валах 5 и с помощью стабилизатора 47, получившего команду от датчика горизонтальности, осуществляется поддержание горизонтального положения рамы 44 с креслом 61. Коляска с поднятым креслом 61 при включении движителей 3 может передвигаться по твердой ровной поверхности. Опускание кресла 61 осуществляется в обратном порядке;
- подъем вверх в режиме К (фиг. 15г). Отключается гиростабилизирующая система коляски и включается стабилизатор 47 горизонтального положения рамы 4. После касания передней частью движителей 3 опорной поверхности порядок работы механизмов такой же, как при подъеме вверх в режиме Г.
2. Использование шасси в транспортных средствах повышенной проходимости с амфибийными возможностями (фиг. 16).
К коробчатой раме 44 крепятся с двух сторон кронштейны 63 с механизмами 64 (в частности, ножничными) опускания понтонов 65 на воду, а к ободу колесных движителей 2 крепятся средства отталкивания от воды 43 (в частности, крыльчатки). Крепление кронштейнов 63 и понтонов 65 может быть как стационарным, так и съемным. Отверстия в коробчатой раме 44 уплотняются средствами против проникновения влаги. В поднятом состоянии понтоны 64 не мешают движению транспортного средства. В опущенном состоянии понтоны 65 обеспечивают оптимальное положение осей колесных движителей 2 с крыльчатками 43 и верхних ветвей гусениц 20 относительно уровня воды для использования наилучшего КПД этих движителей при движении амфибии по воде. При движении на гусеницах 20 используется стабилизатор 47, на колесных движителях 2 - гиростабилизирующая система.
3. Использование шасси в грузовых подъемно-транспортных средствах (фиг. 17).
К раме 44 крепится грузовая платформа 66, к осям колесных движителей 2 - шарнирно П-образная рукоятка 67. Управление средством может осуществляться оператором с пульта, закрепленном на рукоятке. Груз на платформе 66, поддерживаемой в горизонтальном положении с помощью стабилизатора 47, можно поднимать с помощью средства 50 и транспортировать по наклонным поверхностям. При транспортировке груза на колесных движителях 2 используется гиростабилизирующая система.
4. Использование шасси в легковых транспортных средствах повышенной проходимости (фиг. 18).
К раме 44 крепится водительская: кабина 68 с органами управления. Такое средство сочетает возможности движения на колесах по дорогам с твердым покрытием (фиг. 18а) и на гусеницах 20 по мягким грунтам, по холмистой местности (фиг. 18б), с возможностью обозрения окрестностей с высоты поднятой кабины 68 (фиг. 18в) и удобством при парковке в связи со способностью средства развернуться на месте. Движение на гусеницах 20 при значительных уклонах местности осуществляется при отключении стабилизатора 47, при этом фиксируется положение кабины 68 по отношению к модулям 45, 46. Движение на колесах по дорогам с уклонами осуществляется с опорой на два колесных движителя 2 с отключенной гиростабилизирующей системой и два колеса 52 (фиг. 18г). Для улучшения амортизации могут быть применены колесные движители с интегрированной подвеской "Softwheel". Для движения по снежной поверхности на колесные движители или их оси крепятся лыжи 42.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ конфигурирования роботизированного курьерского комплекса | 2024 |
|
RU2830322C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| МАЛОГАБАРИТНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2534202C2 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| ТИХОХОДНОЕ МАЛОГАБАРИТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ЕГО ПРИМЕНЕНИЯ | 2020 |
|
RU2739930C1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| ТРАК ГУСЕНИЦЫ И ГУСЕНИЦА, ОБРАЗОВАННАЯ СОЕДИНЕНИЕМ ТАКИХ ТРАКОВ | 2020 |
|
RU2739378C1 |
| ТЯГА РЫЧАГА ИЛИ ПЕДАЛИ УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739627C1 |
| ПОДРАМНИК КРЫШКИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739202C1 |
Изобретение относится к движителям транспортных средств повышенной проходимости. Модуль колесно-гусеничного движителя содержит колесный и гусеничный движители. На валу или полой оси колесного движителя установлены один на другой приводной полый вал ведущего зубчатого колеса гусеничного движителя и полый вал для крепления к раме транспортного средства с фланцем. Гусеничный движитель установлен на вал ведущего зубчатого колеса с возможностью поступательного и вращательного движений с помощью пазов в корпусе. Шасси с двумя модулями колесно-гусеничных движителей закреплены к раме шасси слева и справа, при этом колесные движители модулей управляются с помощью гиростабилизирующей системы. В одном модуле между средством для амортизации гусеничного движителя и кронштейном или рамой устанавливается стабилизатор горизонтального положения рамы, взаимодействующий с датчиком положения. К раме крепится выдвигающееся средство от опрокидывания шасси и для подъема рамы. Достигается улучшение конструктивных и эксплуатационных качеств транспортного средства. 2 н. и 13 з.п. ф-лы, 18 ил.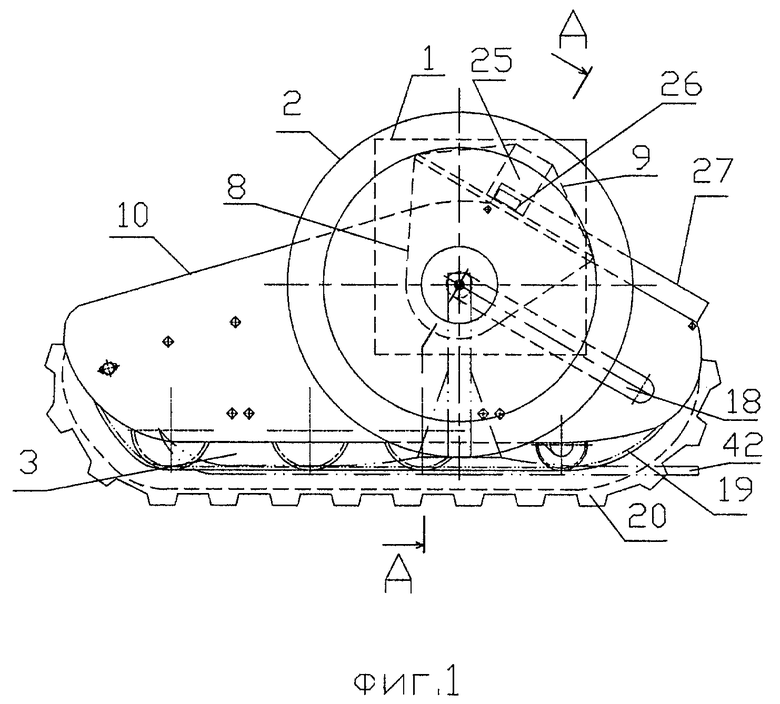
1. Модуль колесно-гусеничного движителя, характеризующийся тем, что колесный и гусеничный движители образуют один узел, при этом на валу или полой оси колесного движителя установлены с возможностью вращения один на другой приводной полый вал ведущего зубчатого колеса гусеничного движителя и полый вал, установленный на подшипник в кронштейне для крепления к раме транспортного средства, с фланцем, образующим одно целое с держателем корпуса гусеничного движителя; на валу с фланцем установлено средство для амортизации гусеничного движителя, присоединенное к кронштейну; гусеничный движитель установлен на вал ведущего зубчатого колеса с возможностью поступательного и вращательного движений с помощью пазов в корпусе; при перемещении корпуса и держателя относительно друг друга остановка осуществляется фиксирующим устройством, а торможение и остановка гусеницы обеспечиваются тормозным средством.
2. Модуль по п. 1, отличающийся тем, что используется средство, обеспечивающее надежность зацепления ведущего зубчатого колеса с гусеницей.
3. Модуль по любому из пп. 1, 2, отличающийся тем, что в качестве колесного движителя используется мотор-колесо.
4. Модуль по любому из пп. 1-3, отличающийся тем, что гусеничный движитель имеет упругую подвеску.
5. Модуль по любому из пп. 1-4, отличающийся тем, что кронштейн выполнен с присоединительными элементами, как поворотный кулак независимой подвески.
6. Модуль по любому из пп. 1-5, отличающийся тем, что колесный движитель имеет интегрированную подвеску "Softwheel".
7. Модуль по любому из пп. 1-5, отличающийся тем, что поверхность качения колесного движителя выполнена аналогично поверхности качения железнодорожного колеса.
8. Модуль по любому из пп. 1-5, отличающийся тем, что к ободу колесного движителя или к его оси прикреплено средство отталкивания от воды.
9. Модуль по любому из пп. 1-3, отличающийся тем, что гусеница выполнена с шипами.
10. Модуль по любому из пп. 1-5, отличающийся тем, что на колесный движитель или его ось крепится лыжа.
11. Шасси с двумя модулями, характеризующееся тем, что модули колесно-гусеничных движителей закреплены к раме шасси слева и справа, при этом колесные движители модулей управляются с помощью гиростабилизирующей системы, позволяющей поддерживать баланс пользователю транспортного средства на этом шасси; в одном модуле между средством для амортизации гусеничного движителя и кронштейном или рамой устанавливается стабилизатор горизонтального положения рамы, взаимодействующий с датчиком положения; к раме крепится выдвигающееся средство от опрокидывания шасси и для подъема рамы.
12. Шасси по п. 11, отличающееся тем, что рама имеет коробчатую форму.
13. Шасси по любому из пп. 11, 12, отличающееся тем, что рама имеет подвижную верхнюю часть.
14. Шасси по любому из пп. 11, 12, отличающееся тем, что к раме крепится понтон с регулированием положения по высоте.
15. Шасси по любому из пп. 11, 12, 14, отличающееся тем, что модули прикреплены к раме на упругой подвеске.
| КОМБИХОД | 2007 |
|
RU2347710C1 |
| Транспортное средство | 1976 |
|
SU856888A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| US 4564080 A1, 14.01.1986 | |||
| US 3276531 A1, 04.10.1966. | |||

