Изобретение относится к лесной промышленности и может быть использовано для формирования укрупненных пачек при проведении лесосечных работ.
Цель изобретения - повышение произ- водительности лесосечных работ.
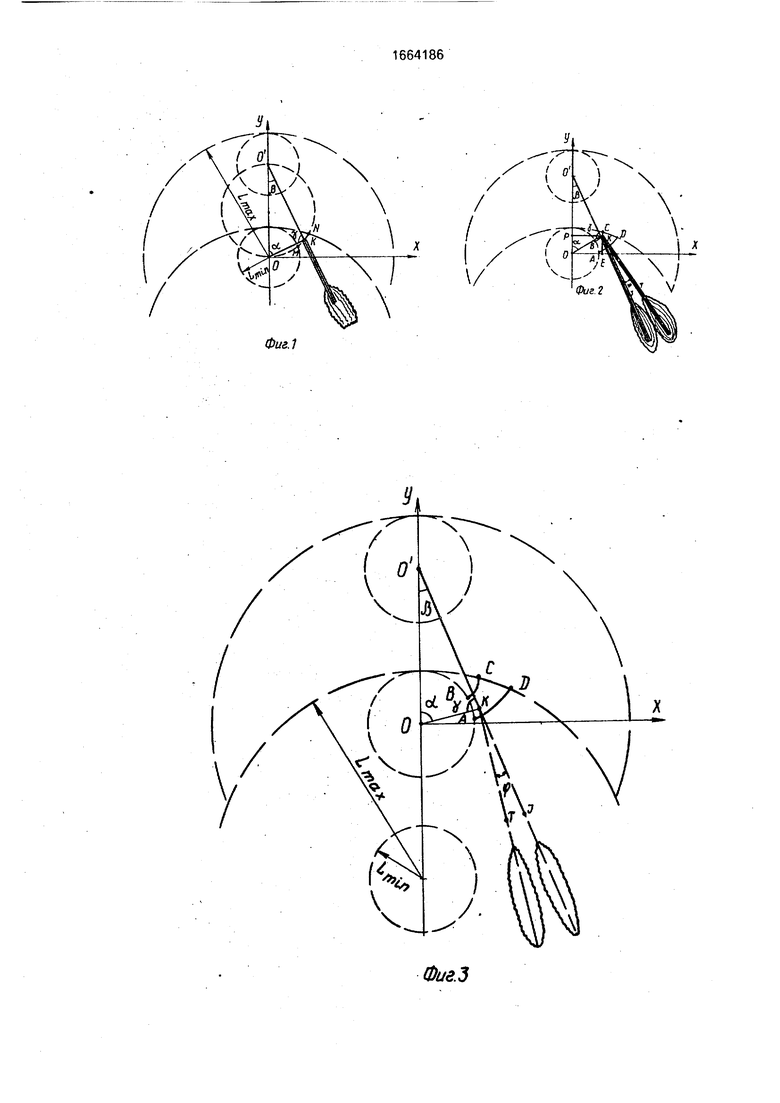
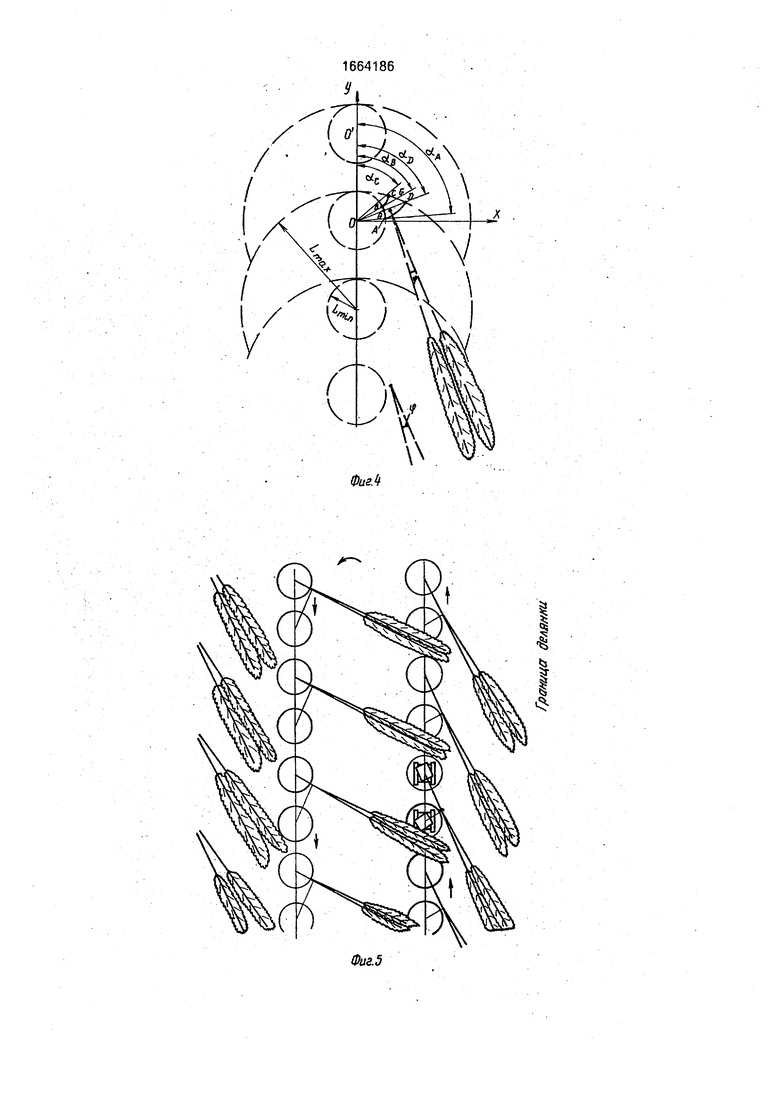
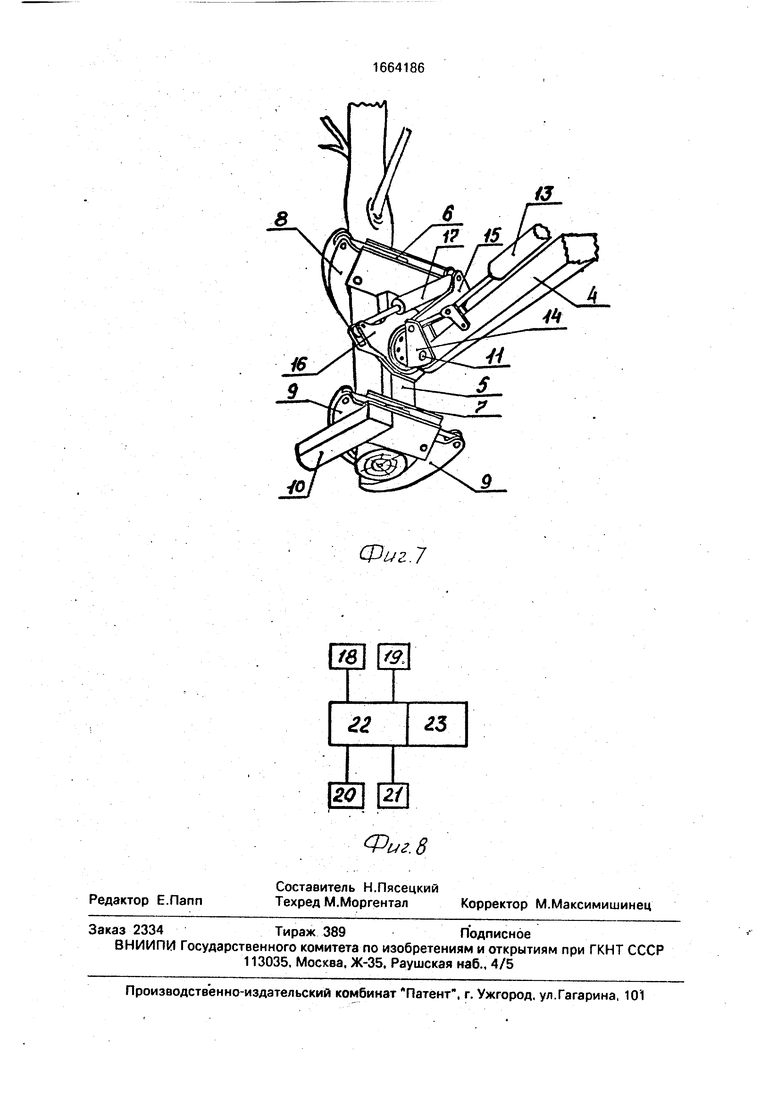
На фиг.1 показана схема формирования объединений пачки деревьев с двух смежных рабочих позиций, в которой деревья, уложенные с первой рабочей позиции ва- лочно-пакетирующей маш(ины, параллельны деревьям, уложенным с второй ее рабочей позиции; на фиг.2 - схема формирования объединенной пачки деревьев, в которой между уложенными деревьями до- пускается определенный угол, (показан первый из вариантов образования угла); на фиг.З - схема формирования объединенной пачки деревьев, в которой между уложенными деревьями допускается определенный угол (показан второй из вариантов образования угла); на фиг.4 - схема формирования объединенной пачки деревьев, в которой показаны углы поворота манипулятора с первой из смежных рабочих позиций валоч- но-пакотирующей машины для нахождения области укладки комлей объединенной пачки; на фиг.5 - схема разработки лесосеки по предлагаемому способу (стрелками показано направление движения машины); на фиг.6 - вариант валочно-пакетирующей машины, предназначенной для осуществления предлагаемого способа; на фиг.7 - вариант захватно-срезающего устройства валочно-пакетирующей машины (показан момент переноса срезанного дерева); на фиг.8 - вариант схемы подсоединения устройства поступления и обработки информации.
Способ осуществляется следующим об- разом с помощью валочно-пакетирующей машины с. захватно-срезающим устройст- BOMV имеющим возможность поворота в двух взаимно перпендикулярных плоскостях.
На раме самоходного шасси 1 этой машины установлена поворотная платформа 2 с силовой установкой, кабиной оператора и технологическим оборудованием. Технологическое оборудование включает в.себя ма- нипулятор из шарнино сочлененных звеньев 3 и 4 и захватно-срезающего устройства (ЗСУ), состоящего из корпуса 5, на котором установлены с возможностью поворота посредством приводов-гидроцилин- дров 6 и 7 верхние 8 и нижние 9 захватные рычаги и режущий орган 10. Корпус 5 ЗСУ имеет возможность поворота в двух взаимно Перпендикулярных плоскостях. Одна из этих возможностей поворота реализуется
вокруг оси 11, в вертикальной плоскости действия манипулятора, а вторая - в перпендикулярной ей плоскости вокруг оси 12. Для осуществления этих возможностей звено 4 манипулятора связано с поворотным вокруг оси 11 посредством привода 13 кронштейна 14, который через механизм поворота связан с корпусом 5 ЗСУ. Механизм поворота состоит из неподвижной 15 и подвижной 16 частей, Неподвижаня часть 15 жестко связана с кронштейном 14, а подвижная часть 16 жестко соединена с корпусом 5 ЗСУ. Подвижная часть 16 имеет возможность поворота относительно неподвижной части 15 вокруг оси 12 посредством привода гидроцилиндра 17. Ось 11 перпендикулярна оси 12. Кроме этого, ва- лочно-пакетирующая машина оснащена датчиком 18, установленным на самоходном шасси 1 и показывающим значение угла а поворота манипулятора с ЗСУ в плане относительно направления движения машины в пределах , и датчиком 19, установленным, например, на самоходном шасси 1 и показывающим значение угла ее в пределах «о а сд . Валочно-паке- тирующая машина оснащена также датчика- ми 20 и 21, показывающим значение текущего вылета манипулятора с ЗСУ. Датчик 20 установлен в месте шарнирного сочленения звеньев 3 и 4 манипулятора, а датчик 21 установлен в месте шарнирного сочления манипулятора и самоходного шасси 1. Датчики 18 и 19, а также 20 и 21 подсоединены к устройству 22 управления, выполненному на основе микроЭВМ и установленному на поворотной платформе 2. К устройству 22 управления подсоединено сигнальное устройств 23.
Поскольку трелевку отформированных валочно-пакетиру щей машиной объединенных пачек деревьев предполагается осуществлять бесчокерными трелевочными средствами с пачковым захватом, то укладку срезанных с двух смежных рабочих позиций деревьев следует производить в место, в котором разбег комлей деревьев и угол развала ( непараллельности ) р находились в допустимых пределах, диктуемых возможностями по раскрытию захвата этих трелевочных средств. Этим условиям соответствует область ABCD, ограниченная линиями АВ, CD, BC, AD, которые соответствуют следующим зависимостям: л./,.. | i г I ч
xMfl
тох
-Ь„;„)г 1
так ;
( 1 I max kmin 2 / Umax
x ИГ г } ( i } 4(x4Z)xZ(L m«rLnvn- j)rh; f j
где у и х - координаты граничных точек указанной области в системе координат, об- разованной направлением движения машины и перпендикулярном к нему в точке - центре координат, проходящем через ось горизонтального поворота манипулятора машины на первой из рабочих позиций со- ответствующей пары;
Lmax и Lmin - соответственно наибольший и наименьший вылеты манипулятора машины;
допустимый угол непараллельности деревьев в объединенной пачке.
Для вывода этих зависимостей рассмотрим случай фоомиоования объединенных пачек деревьев с углом развала р, равным О, т.е. случай, когда деревья с двух смежных рабочих позиций укладывают строго параллельно друг другу. Тогдда треугольник ОКО (фиг.1) при вершине К должен иметь прямой угол, а вершина К (соответственно комлевая часть пачки) должна располагаться толь- ко на линии MN. Исходя из свойства прямоугольного треугольника, указывающего на то, что вершины всех прямых углов, базирующихся на гипотенузе, находятся на дуге описанной окружности, линиям MN мо- жет быть только дугой окружности. Уравнение окружности в системе координат ХОУ имеет вид:
(X - А)2 + (у - В)2 R2,
где А и В - координаты ее центра;
R- радиус.
Поэтому уравнение окружности, которой принадлежит линия MN в системе ко- ординат ХОУ, имеет вид
х2+/у + (оС/|2
Х + V 2 ) 2 j и
где точки О и О1 - положение оси горизонтального поворота манипулятора соответственно на первой и второй смежных рабочих позициях;
ОО1 - расстояние между первой и второй смежными рабочими позициями машины (расстояние ее межпозиционного переезда):
. ОО1 Lmax - Lmin.(2)
Следует отметить при этом, что система координат ХОУ образована направлением движения машины (ось ОУ) и перпендикулярна к нему (ось ОХ) в точке - центре коор- динат, проходящем через ось горизонтального поворота манипулятора машины на первой из ее смежных рабочих позиций, с которых машина осуществляет съем деревьев и укладку их в объединенную пачку.
С учетом формулы (2) уравнение (1) принимает вид
-l(уLmax Lmln 2
г Lmax Lmln
2
(3)
Из фиг.1 видно, что точка N линии MN принадлежит дуге окружности, описанной радиусом, равным Lmax, из центра, совпадающего с осью горизонтального поворота ма- нипулятора на рабочей позиции, предшествующей первой из двух смежных рабочих позиций, а точка М этой линии принадлежит дуге окружности, описанной радиусом, равным Lmin, из центра, совпадающего с осью горизонтального поворота манипулятора на первой из смежных рабочих позиций, т.е. из точки О. Уравнения указанных окружностей соответственно имеют вид
X2 + (у + Lmax - Lmln) Ln X2 + у2 Lmin2.
(4) (5)
Решением уравнений (3) и (4) вычисляются координаты точки N, решением уравнений (3) и (5) - координаты точки М. Таким образом для того, чтобы уложить деревья параллельно в одну пачку с двух смежных рабочих позиций, достаточно на первой из смежных рабочей позиции деревья уложить перпендикулярно, а на второй - параллельно вертикальной плоскости действия манипулятора, располагая комли на одном уровне, на дуге MN окружности (3),
Далее рассмотрим случай формирования объединенных пачек с допустимым углом f непараллельности деревьев, отличным от О, В этом случае деревья для укладки переносят в зону размещения комлей, ограниченную некоторой областью ABCD. Реализация такой укладки в объединенные пачки значительно проще, чем в описанном выше случае. Для определения области ABCD достаточно найти уравнения линий, на которых лежат кривые AD и ВС.
716641868
Уравнения линий CD и АВ известны,скостЬкндействия манипулятора и составляони определяются соответственно выраже-ет 90°, а угол ОКУ, т.е. угол между осью
ниями (4) и (5). На основании теоремы коси-дерева, уложенного с второй из двух смежнусов из треугольника ОКО (фиг.2) можноных рабочих позиций, и- вертикальной плосоставить выражение5 скостью манипулятора, составляет 180°, тс
соотношение между углами а и р имеет
ОК12 - ОК2 + О К2- 2 cos у, (6)вид
где из треугольника ОКЕ у 180 - f - р (случай расположи
ОК2 х2 + у2,(7)ния деревьев согласно фиг.2), из треугольника О1 КРили
0 K2 x2 + (00 -y)2.(8) (случай расположи
. С учетом выражений (7) и (8) уравнениения деревьев cote) примет видгласно фиг.З),
0 AxV xMOQ -Ґ)-2ПТ е : П
V .20 Y .(10)
-2л|(х)(оо):со5У;
ОуЧЯиЧоо 2- Su- QO -Подставив угол (10) в выражение (9) и
ии - Ј т ww {. wuучитывая, что
-M fl txMOO -yn-cosy; 25
,2.,1,COS V COS hf ± «М + Sin tf,
00 г 00 -00 V2 V
ТвХ+У 2-
получают уравнение линии, на которой ле4((.cosr 30 житдугаВС:
Разделив сокращающиеся члены
ОО12 „Л./,, /bmax-U,
на 2, получаютх+1 1 (
35.
00.. 00.(.п.
imm ч
в
получают уравнение линии, на которой ле,
imm ч

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разработки лесосеки | 1990 |
|
SU1750499A1 |
| Способ рубки деревьев валочно-пакетирующей машиной и манипулятор валочно-пакетирующей машины для осуществления способа | 1982 |
|
SU1132854A1 |
| СПОСОБ МАШИННОЙ ЗАГОТОВКИ ДРЕВЕСИНЫ НА ЛЕСОСЕКЕ | 2001 |
|
RU2208308C1 |
| СПОСОБ МАШИННОЙ ЗАГОТОВКИ ДРЕВЕСИНЫ НА ЛЕСОСЕКЕ | 2001 |
|
RU2208309C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕК | 2013 |
|
RU2547429C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕКИ | 1997 |
|
RU2120736C1 |
| СПОСОБ ЗАГОТОВКИ СОРТИМЕНТОВ МАШИНОЙ МАНИПУЛЯТОРНОГО ТИПА | 2008 |
|
RU2365093C1 |
| Способ разработки лесосеки | 1982 |
|
SU1064912A2 |
| Способ разработки лесосеки | 1989 |
|
SU1776371A1 |
| ВАЛОЧНО-ПАКЕТИРУЮЩАЯ МАШИНА | 1998 |
|
RU2150819C1 |
Изобретение относится к лесной промышленности и может быть использовано для формирования укрупненных пачек при проведении лесосечных работ. Изобретение позволяет повысить производительность лесосечных работ за счет сокращения операций при укладке деревьев в объединенную пачку с двух рабочих позиций и формирования пачек под углом к волоку без сцепления между собой крон деревьев смежных пачек. Валочно-пакетирующая машина с захватно-срезающим устройством (ЗСУ) 5, имеющим возможность поворота в двух взаимно-перпендикулярных плоскостях, во время движения в сторону от уса с первой из смежных рабочих позиций срезанные деревья укладывает поворотом корпуса ЗСУ 5 вокруг оси 11 манипулятора в вертикальной плоскости действия, а с второй - в то же место поворотом корпуса ЗСУ 5 вокруг оси 12 в поперечной плоскости. Во время движения валочно-пакетирующей машины в сторону лесовозного уса порядок укладки деревьев в объединенную пачку меняется по позициям. Разбег комлей объединенной пачки и угол непараллельности в допустимых пределах для трелевки бесчокерными трелевочными средствами может определяться с помощью датчиков 18 и 19, показывающих значение угла поворота манипулятора, и датчиков 20 и 21, показывающих значение вылета манипулятора и подсоединенных к устройству 22 и сигнальному устройству 23, посредством которых оператор определяет нахождение срезанного и укладываемого дерева в расчетной зоне укладки дерева в объединенную пачку, что диктуется возможностями по раскрытию захватов бесчокерных трелевочных средств с пачковыми захватами. 8 ил.
Ч((00).со5у. 40(11)
Уравнение линии, на которой лежит дуга AD следующее:
Отсюда
.1й
V-ff- V){A(°0 -afl
x-cosy.x
С учетом формулы (2) уравнение имеет
45 -г / btnnx wn / «riax -L mi И ,
:Л 2 I 1 2I
yicium uppay/ioi лу ypaoncnric rimcci. . -
ВИД хМ, Unajrbn f .(x fltx f ax - -SinCf
X U Z Гso
jt-,(12)
|(X2V) X ( шаГ L ro; ) J сos у -При подстановке в уравнения (11) и (12)
значения угла р 0 они примут вид уравне/Ьтак-Ьц,; т55 ния (3).
I 2. I Положение ЗСУ с зажатым срезанным
„ деревом в плане может быть определено чеГак как угол ОКТ есть угол между осьюгоризонтального поворота a . мадерева, уложенного с первой из двух смеж-„ипулятора и величину его вылета L.
ных рабочих позиций, и вертикальной пло-поэтому для того, чтобы контоолировать по
x
45 -г / btnnx wn / «riax -L mi И ,
:Л 2 I 1 2I
91664186Ю
падание ЗСУ в область ABCD и выход из как уравнение (14) представляет собой квадэтой области, необходимо знать зависимость ратное уравнение, то
вылета манипулятора L от угла его горизон-.i
тального поворота а, измеренного в преде-L4 z&UU соэоб i
лах и , 5
соответствующих сложным линиям ВС и AD. 00|u(cos2c&
На практике это может быть осуществленоi -J 00 cos об-.
с использованием соответствующей систе-
мы датчиков, показывающих текущие углыt001
горизонтального поворота а и вылет мани- Ю со5Ч Х
пулятора L.
С учетом того, что из треугольника ОКРх co5Zod coszcp-cos2 5;n2u
у L cos а.х L sin а, получают
выражения:пп
15 00 -С05 ± -УУ-х
у COStP
L5- 5ln V L. 00 .L-COSOt-,
t-J(Le-5l ec6 La.co524Le.5ln2ct+ T|cosV(cosV«)teJnV
+ (00 -L-co5&s| 131. srncj) 2° 00 -cosct± -л| -co52fc 5in2q
La(5;nV4Co5V -00 -L-coso6 , 00 smtp ,
00-co5o:t - --V|l-co5zei 00-cose6t
±L-jLia-slTi2oi,00|2-2-QOl.L-CQSc6+25
, . 5incf . tOo .-t i -OO fcoeo t.s).
L -OO -L-cosu
30, С учетом выражбния{2)
tLi|l4(l(6m2o6,co52oi)400 -2-OQ -co5o(:xLgc (Lmgx Ujn)(cosa s|n atg.
xsiviq 15
35
. i Г. о А Л. n . , 7 LAD (Uiax - Lmln) (COS G + Sin О tg p} ,
Ц-00-совсб ци 00 -Z 00-L-co5ci 5inq,v yv j/6j
(13)
2 , a 1,2Таким образом, при формировании пачU -2L-OQ -coeto-tQO cos об L -sin 4) 40Ки в пределах углов поворота манипулятора,
OO Sf Cp- OO -l cosot-Sir cpjравных , комли деревьев сле. . г fir 2 гдует укладывать на вылете, равном не менее
L ( Ц)-00 (сое об-sin ср)LBC, иначе комли окажутся за пределами
45ао а ад вылет манипулятора не должен превышать LAD. Значение углов,
ПП1/2( V ,«в,aDlaA определяют из уравнения
Ц24- tco5 s n 2L-00 C0506j(14), подставляя вместо L значения вылета,
с°5 Ч соответствующие точки A,B,C,D. При этом
п, i , ,. 2,п вылеты манипулятора в точках В и А равны я , OU (со5 об-Sin M) л
L -UL-00-C05CC +-гГл О,
Lmin (фиг.4).
(14), ,
ксЦ - 2 U 00 cos a +
где L - текущий вылет манипулятора. °°.
Из уравнения (14) найдем зависимости,2 2 2
вылета манипулятора, соответствующего+ j--- 0;
дугамВСиАО. в зависимости от угла а. Такcos p
-5- c°s2 « - 2 U OO1 cos a -
00 -sln y+L 0
COS (p
Решаем это квадратное уравнение:
cospc«
.
00
00
g сев .4 4 ,2 OO -einV
l-c-« sV- |f т| . ««N-L1. .-e5FT
00
I 1
LeC05Zlf 1С05С|Л
00 о Л
. чOO Sin7 j , г
Lc-ws cftcos coai -Lc Wq
..
coa ift «8п«у OO -bVcosV
,-551-;
С учетом выражения (2) получают:
Le COS -JU ait-L „,;„)-Ц 5iM2tf
Ke«ar«oe;1)
mo« m,n
(17)
где U - вылет манипулятора в точке С;
tfe«arecos
lmrt cos74 -JfLта -bm.nl1-«.„.„ ees«c.,V
3L2-fOOl2-L2nax ± ±V2L2+200l2-L2nax 2 -L -sfn).
maIT win
(18)
50
Возведя обе части уравнения в квадрат, получают:
iL1 1--1- « f . .-а. и1ах.4и(а.+в.(19)i . ,Т.
где LD - вылет манипулятора в точке D;55 вх I l
+ 6(6L4L,wax+ .4. „ i ч rtrti«,
оСд«агссо5
Lminc HlL.-i -LlL.n V 2f -2 00 -.Ltax-ft.9inxtf-8.L2.00|lx
wax + .4. „ i ч rtrti«,
mot mi n
(20)
ч i 1
xein4f + 4.U.L,;,ax.5;n2q 0
В выражениях (17) и (19) неизвестными остаются. LD.
Для их определения нужно преобразовать выражения (А) и (13). Выражение (4) с учетом (2) имеет вид
х2 + у2 + 2у OO1 + OO l2 Lmax2.
где из треугольника ОРК х2 + у2 L2. Отсюда:
1 2+2уОО + 00l2 Uax2; y.00, L2ax-00 2-L2(21)
20
Выражение (13) после умножения обеих частей на L будет иметь вид:
L2 г- ОО1 L cos a
±42+OOl2-2-t r L;cosax 25X L slny).
С учетом того, что из треугольника ОКР у L cos a, получают
30
L2 - ОО1 у
+0012 -2 -ОО1 у -L .
(22)
35 Преобразуя выражение (22), с учетом выражения (21), получают
2 -иах+00 2-1- + 2
±VL2 +0012 -LLx +L2 +0012 L
3L2-fOOl2-L2nax ± ±V2L2+200l2-L2nax 2 -L -sfn).
6(6L4L,.9inxtf-8.L2.00|lx
wax + .4. „ i ч rtrti«,
ч i 1
xein4f + 4.U.L,;,ax.5;n2q 0
.
,4/- 7 i ,a/ I e,. glVoQ oaVootVn«,-gUlL.-co64ri
L49-8s,(6.QO -euLix - Ь1 8coe7vp
-8-001 e;n2cf
(
41 0-4co5 4)((co5)l2m,
L4( + (8.oo -Ј-oo - L Lueco 4
ll m;n-2.Lmax-Lm n)
С учетом выражения (2) получают
- 0.
-й-оо1 sinnj-euJnax-iU™
(23)
. , «2,/ 1 2 2лРешая это квадратное уравнение, поя+4Lmax-s MOO -I/U OJ 15 V4aiOT
Мп(U2cos bLx + ()bmQX-b,T1;n) : IИ-8со5гЦ
Ч
HU2cos2if)(l-4co5gCfy(Lnay-Ltnin№(Bcos2tf)(Lmin-gbmK-U(.inf
(U8cose(f)
2/1Л2.
(25)
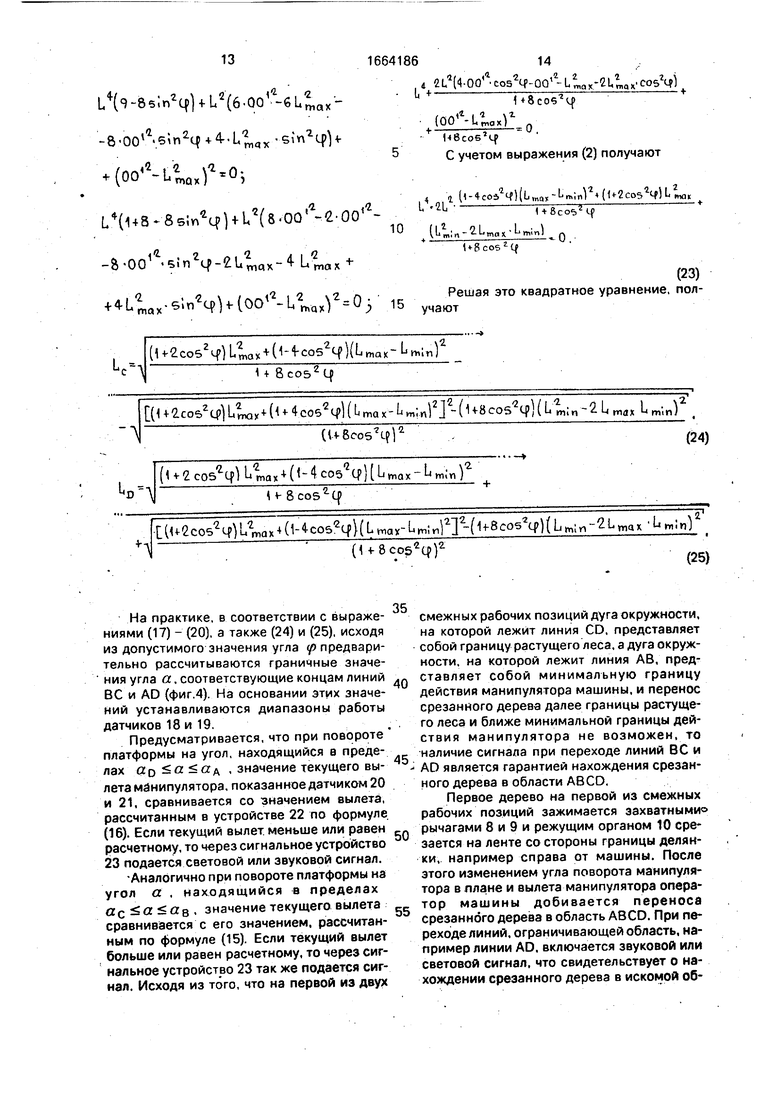
На практике, в соответствии с выражениями (17) - (20), а также (24) и (25), исходя из допустимого значения угла р предварительно рассчитываются граничные значения угла а. соответствующие концам линий ВС и AD (фиг.4). На основании этих значений устанавливаются диапазоны работы датчиков 18 и 19.
Предусматривается, что при повороте платформы на угол, находящийся в пределах aD a o:A , значение текущего вылета манипулятора, показанное датчиком 20 и 21, сравнивается со значением вылета, рассчитанным в устройстве 22 по формуле (16). Если текущий вылет меньше или равен расчетному, то через сигнальное устройство 23 подается световой или звуковой сигнал.
Аналогично при повороте платформы на угол а , находящийся в пределах значение текущего вылета сравнивается с его значением, рассчитанным по формуле (15). Если текущий вылет больше или равен расчетному, то через сигнальное устройство 23 так же подается сигнал. Исходя из того, что на первой из двух
.
Ь1 8coe7vp
С учетом выражения (2) получают
-2.Lmax-Lm n)
cos tf
- 0.
(23)
(U8cose(f)
2/1Л2.
(25)
0
5
5
-.
5
смежных рабочих позиций дуга окружности, на которой лежит линия CD, представляет собой границу растущего леса, а дуга окружности, на которой лежит линия АВ, представляет собой минимальную границу действия манипулятора машины, и перенос срезанного дерева далее границы растущего леса и ближе минимальной границы действия манипулятора не возможен, то наличие сигнала при переходе линий ВС и AD является гарантией нахождения срезанного дерева в области ABCD.
Первое дерево на первой из смежных рабочих позиций зажимается захватными рычагами 8 и 9 и режущим органом 10 срезается на ленте со стороны границы делянки, например справа от машины. После этого изменением угла поворота манипулятора в плане и вылета манипулятора оператор машины добивается переноса срезанного дерева в область ABCD. При переходе линий, ограничивающей область, например линии AD, включается звуковой или световой сигнал, что свидетельствует о нахождении срезанного дерева в искомой области ABCD; После этого корпус 5 ЗСУ посредством привода 17 поворачивается вокруг оси 12, придавая направление падения зажатому дереву. Раскрытием захватных рычагов 8 и 9 срезанное дерево укладывается на грунт. В результате комель уложенного дерева будет находиться в области ABCD.
Необходимо отметить, что оператор машины руководствуется сигналами с устройства 23 в основном при укладке первого дерева с первой из смежных рабочих позиций. Следующие деревья оператор уклады- йает в то же место, ориентируясь визуально.
Возможен также упрощенный вариант осуществления предлагаемого способа. В этом варианте комли деревьев объединенной пачки укладываются в область © В6О(фиг.4), являющуюся частью области ABCD. Область в DGD ограничивается углом а поворота манипулятора в плане, находящемся в пределах , границей растущего леса GD и минимальной границей вылета манипулятора О В. При этом на валочно-пакетирующей машине достаточно иметь, например, датчик 18, показывающий значение угла а поворота манипулятора в плане в пределах от «в Д° а о и через сигнальное устройство 23, оповещающий о нахождении срезанного и зажатого в ЗСУ дерева, в области 0BGD.
После срезания и укладки в пачку всех деревьев с первой из смежных рабочих позиций оператор перемещает валочно-паке- тирующую машину вперед до границы растущего леса и останавливает ее на второй из смежных рабочих позиций. Все деревья, находящиеся в пределах досягаемости манипулятора с этой рабочей позиции, срезаются и выносятся в место размещения комлей деревьев, уложенных в пачку с предыдущей рабочей позиции, где поворотом захватно-срезающего устройства вокруг оси 11 посредством привода 13 в вертикальной плоскости действия манипулятора укладываются в ту же пачку В результате получается объединенная пачка, состоящая из деревьев, срезанных с двух смежных рабочих позиций валочно-пакетирующей машины. На следующих смежных рабочих позициях процесс формирования объединенной пачки повторяется.
После разработки первой ленты оператор разворачивает машину и устанавливает
ее на рабочую позицию в начале следующей ленты. При движении валочно-пакети- / рующей машины в сторону, противоположную трелевке, т.е. от уса, сре5 занные деревья с первой из смежных рабочих позиций укладываются в область ABCD 4 поворотом корпуса 5 ЗСУ вокруг оси 12 по- t средством привода 17 в вертикальной плоскости действия манипулятора со стороны
0 уже разработанной ленты. С второй из смежных рабочих позиций срезанные деревья укладываюстя в область ABCD в ту же пачку поворотом корпуса 5 ЗСУ вокруг оси 11 посредством привода 13 в перпендику5 лярной ей поперечной плоскости действия манипулятора.
То же самое осуществляется при укладке объединенной пачки деревьев комлями в области 0BGD.
0 Таким образом, все объединенные пачки деревьев, сформированные как при движении машины в направлении трелевки к усу, так и при движении в противоположную сторону от уса, лежат комлями в направле5 нии трелевки.
Реализация предлагаемого способа позволяет за счет сокращения операций при укладке деревьев в объединенную пачку с
0 двух рабочих позиций формирование пачек деревьев под углом к направлению движения машины и исключение при этом сцепления крон деревьев смежных пачек, а также повышается производительность лесосеч5 ных работ.
Формула изобретения
Способ заготовки деревьев, включаю- 0 щий перемещение валочно-пакетирующей машины по разрабатываемым лентам, захват, срезание деревьев, последующий перенос и укладку их в объединенные пачки манипулятором с двух рабочих позиций и 5 размещение комлей укладываемых деревьев в зоне действия захватных устройств трелевочных механизмов, отличающийся тем, что, с целью повышения производительности лесосечных работ, на одной из 0 рабочих позиций каждой пары деревья укладывают в объединенную пачку перпендикулярно плоскости действия манипулятора валочно-пакетирующей машины, а на другой - параллельно этой плоскости.
Фиг.1
ФигЗ
V
fSl 9,
Фиг.7
21
23
| Аболь П.И. | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Способ рубки деревьев валочно-пакетирующей машиной и манипулятор валочно-пакетирующей машины для осуществления способа | 1982 |
|
SU1132854A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
