сл
с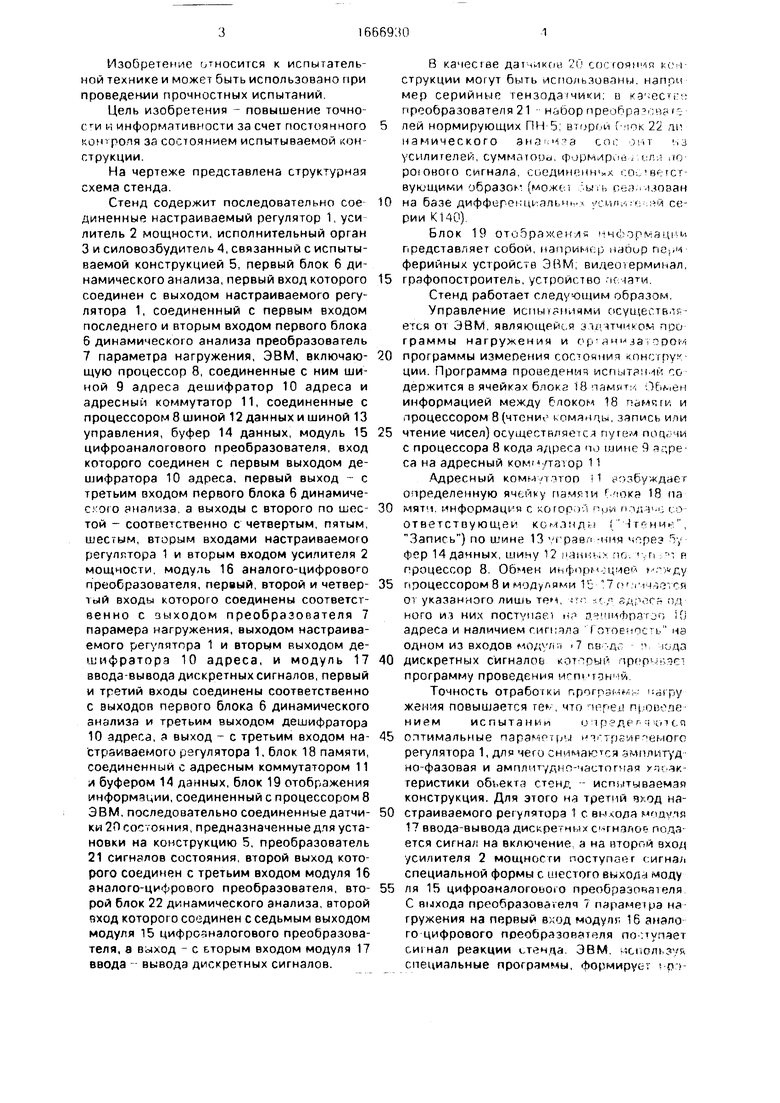
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания конструкций | 1990 |
|
SU1739239A1 |
| Стенд для испытания конструкций | 1985 |
|
SU1283569A1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| Автоматизированная система управления блочно-модульного построения нагружателем гидравлическим в стендах прочностных испытаний | 2016 |
|
RU2643198C1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
| СТЕНД ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ И ДИАГНОСТИКИ ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2005 |
|
RU2308749C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| СТАНЦИЯ ДЛЯ ИСПЫТАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2053492C1 |
Изобретение относится к испытательной технике. Цель изобретения - повышение точности и информативности за счет контроля за состоянием конструкции. Параметры нагружения определяются заданной программой испытания, управление производится процессором 8 ЭВМ через модули 15 - 17 цифроаналогового преобразователя, аналого-цифрового преобразователя и ввода - вывода дискретных сигналов. Контроль состояния конструкции осуществляют датчики 20 состояния, связанные с ЭВМ через преобразователь 21 сигналов состояния и второй блок 22 динамического анализа. Результаты испытаний и сервисная информация выводится процессором 8 на блок 19 отображения информации. 1 ил.
о о о ю
CJ
о
ю
Изобретение относится к испытательной технике и может быть использовано при проведении прочностных испытаний.
Цель изобретения - повышение точности и информативности за счет постоянного кот ропя за состоянием испытываемой конструкции.
На чертеже представлена структурная схема стенда.
Стенд содержит последовательно сое диненные настраиваемый регулятор 1, усилитель 2 мощности, исполнительный орган 3 и силовозбудитель 4, связанный с испытываемой конструкцией 5, первый блок 6 динамического анализа, первый вход которого соединен с выходом настраиваемого регулятора 1, соединенный с первым входом последнего и вторым входом первого блока
6динамического анализа преобразователь
7параметра нагружения, ЭВМ, включающую процессор 8, соединенные с ним шиной 9 адреса дешифратор 10 адреса и адресный коммутатор 11, соединенные с процессором 8 шиной 12 данных и шиной 13 управления, буфер 14 данных, модуль 15 цифроаналогового преобразователя, вход которого соединен с первым выходом дешифратора 10 адреса, первый выход - с третьим входом первого блока 6 динэмиче- с; 0(о анализа, а выходы с второго по шестой - соответственно с четвертым, пятым, шестым, вторым входами настраиваемого регулятора 1 и вторым входом усилителя 2 мощности, модуль 16 аналого-цифрового преобразователя, первый, второй и четвертый входы которого соединены соответственно с выходом преобразователя 7 парамера нагружения, выходом настраиваемого регулятора 1 и вторым выходом дешифратора 10 адреса, и модуль 17 ввода-вывода дискретных сигналов, первый и третий входы соединены соответственно с выходов первого блока 6 динамического анализа и третьим выходом дешифратора 10 адреса, а выход - с третьим входом настраиваемого регулятора 1, блок 18 памяти, соединенный с адресным коммутатором 11 и буфером 14 данных, блок 19 отображения информации, соединенный с процессором 8 ЭВМ, последовательно соединенные датчики 2П состояния, предназначенные для установки на конструкцию 5, преобразователь 21 сигналов состояния, второй выход которого соединен с третьим входом модуля 16 аналого-цифрового преобразователя, второй блок 22 динамического анализа, второй вход которого соединен с седьмым выходом модуля 15 цифрочналогового преобразователя, а выход - с ьторым входом модуля 17 ввода вывода дискретных сигналов.
В качестве датчиксш 20 состояния ич струкции MOiyT быть использованы, напои мер серийные гензода чики, о кэ -есч ч преобразователя 21 наоор преобра : г г
лей нормирующих ПН 5, вторг.и ( члк. 2z ли панического энэ Ч а cor vn sj усилителей, сумматоиы, формируй ел.,1 .ю роюного сигнала, соединенных s.o-., ж гсг- вующими образов (можем ы.ь о.-мован
0 на базе дифференциалы- - -/CH/II/I- ,JH серии К140)
Блок 19 отибражехия представляет собой, например i-uoup пе}.ч ферийных устройств ЭВМ, видеотерминал,
5 графопостроитель, устройство .-ic .
Стенд работает следующим образом. Управление исмьпамиями осуществляется от ЭВМ, являющейся летчиком при граммы нагружения и рон
0 программы измерения состояния консгрук ции. Программа проведения испытании со держится в ячейках блока 18 памяти Обмен информацией между блоком 18 памяти и процессором 8 (чтение команды, запись ипи
5 чтение чисел) осуществляется путем погд. чи с процессора 8 кода адреса по шине 9 адреса на адресный КОММ.ЛГЗЮР 11
Адресный комм/moo M созбуждаег определенную ячейку памяти гчокэ 18 па
0 мяти. информация с ко гор , пм mj-.-v. . о ответству ющеи кo, ( f тг-ни , Запись) по шине 13 i-рчвл -пня sopea v фер 14 данных, шину 12 н.-жн л по. .п -, р процессор 8. Обмен иифпрм-;цие гг.иду
5 процессором 8 и модулями 1 j 7с ..ся 01 указанного лишь тем, г ядррг - п, иого из них поступает i 3ap|iMrhpatjo iO адреса и наличиемгип:чла IОЧОЕЯПСТЬ на одном из входов MOAwr.i «7 пв--ги ic/да
0 дискретных сигналов который -ippp p- ci программу проведения мгт ган й
Точность отработки прпгрзмг/-- Mtpy жения повышается , что rHY eti Рговоле нием испытании и треде г ч о1сп
5 оптимальные параметры нт.-трЈир еыого регулятора 1, для чего снимаются амплитуд но-фазовая и амплчт/дно-частогчда у-т-лк- теристики обьектз стенд -- испытываемая конструкция. Для этого на третий ч ход на0 страиваемого регулятора 1 с вьиодя 17 ввода-вывода дискретных с -гн-чло подается сигнал на включение а на второй вход усилителя 2 мощности поступает г.игна/i специальной формы с шестого выход-: моду
5 ля 15 цифроаналогоьо О преобразователя С выхода преобразовагелч 7 параметра на гружения на первый вход модуп : 16 знало го цифрового преобразователя покупает реакции стенда, ЭВМ. ;и, специальные программы, Формирует i p- граммы-сигналы, соответствующие величине коэффициентов настройки настраиваемого регулятора 1 (усиление, величина дифференциальной и интегральной составляющих). Эти сигналы с второго, третьего и четвертого выходов модуля 15 цифроаналого- вого преобразователя подаются на четвертый, пятый и шестой входы настраиваемого регулятора 1, что обеспечивает его настройку ;ia конкретный объект с определенными динамическими характеристиками. Затем снимается сигнал отключения, присутствующий на третьем входе настраиваемого регулятора 1, проводится пробный запуск и производится коррекция коэффициентов настройки. Если в схеме стенда применяется несколько силовозбудителей 4, настройка настраиваемого регулятора 1 каждого канала нагруже- ния осуществляется с учетом влияния остальных каналов (не показаны).
После настройки ЭВМ приступает к управлению испытаниями по данной программе нагружения. При этом с пятого выхода модуля 15 цифроаналогового преобразователя на второй вход настраиваемого регулятора 1 поступает сигнал управления, соответствующий амплитуде заданного параметра нагружения, который сравнивается с сп чалом обратной связи, поступающим с выхоа(Э преобразовзтеля 7 параметра нагружения на первый вход настраиваемого регулятора 1, который вырабатывает сигнал рассогласования .поступающий с его выхода на первый вход усилителя 2 мощности и пеовый вход блока б динамического анализа Усиленный усилителем 2 мощности сигнал рассогласования поступает на лсполнительный орган 3, воздействующий на силовозбудитель 4, который имитирует эксплуатационные нагрузки на конструкцию j.
11рин 1ип работы блока 6 динамического анализа состоит в следующем. На его третий вход с первого выхода модуля 15 цифро- анапогового преобразователя после проведения контрольных испытаний и установки уточненных значений настроек регулятора 1 подается сигнал, соответствующий допустимому отклонению сигнала рассогласования. После этого ЭВМ прекращает опрос сигнала рассогласования и возобновляет его лишь в случае прихода на вход модуля 17 ввода-вывода дискретных значений сигнала с выхода блока 6 динамического анализа. Свидетельствующего об от- клонении разницы между сигналами рассогласования и обратной связи на величину, превышающую заданное допустимое отклонение. Сигнал обратной связи поступает с выхода преобразователя 7 параметра
погружения на второй вход блока 6 динамического анализа, где сравнивается с сигналом рассогласования, приходящим на первый вход. Результат сравнения сравни- 5 вается с заданным допустимым отклонением (третий вход).
При возникновении на выходе блока б динамического анализа сигнала, поступающего на вход модуля 17 ввода-вывода диск- 10 ретных сигналов, ЭВМ начинает опрос первого входа модуля 16 аналого-цифрового преобразователя, соединенного с выходом преобразователя 7 параметра погружения. ЭВМ анализирует полученную 15 информацию, производит изменение настроек настраиваемого регулятора 1, корректируя по специальным программам скорость и амплитуду нагружения и выдавая соответствующие сигналы на четвертый, пя0 тый и шестой входы последнего с второго, третьего и четвертого выходов модуля 15 цифроаналогового преобразователя,
Периодически путем опроса первого входа модуля 16 аналого-цифрового преоб5 разователя, на который поступают сигналы с выхода преобразователя 7 параметра нагружения, контролируется форма отрабатываемой программы нагружения. т.е воспроизводимость заданной программы.
0 Если после проведения коррекции настраиваемого регулятора 1 последующий анализ сигналов на первом и втором входах модула 16 аналого-цифрового преобразовав эля свидетельствует о возвращении процесса 8
5 заданный точностной режим нагружения и сигнал на входе модуля 17 ввода вывода дискретных сигналов отсутствует, то испытания продолжаются. Если результаты анализа отрицательны и сигнал продолжает
0 поступать, что означает неисправность оборудования стенда или нарушение состояния (разрушение) конструкции, ЭВМ производит постепенную разгрузку стенда путем уменьшения сигнала на пятом выходе моду5 ля 15 цифроаналогового преобразователя, воздействуя на второй вход настраиваемого регулятора 1. Одновременно с процессом управления осуществляется процесс контроля состояния испытываемой конструк0 ции.
Контроль состояния испытываемой конструкции производится следующим образом.
Деформации , возникающие в испыты5 ваемой конструкции 5, регистрируются с помощью датчиков 20 состояния, сигналы от которых поступают на вход преобразователя 21 сигналов состояния. Сигналы с первого выхода преобразователя 21 сигналов состояния поступают на третий вход модуля
16 аналого-цифрового преобразователя ЭВМ. Процесс контроля состояния испытываемой конструкции состоит из измерения сигналов от датчиков 20 состояния, сравнения их с допустимыми значениями, анализа значений измеряемых сигналов и специальной обработки. Однако временные характеристики процесса нагружения в общем случае ограничены для осуществления полного процесса измерения и обработки. Поэтому в стенд вводится второй блок 22 динамического анализа, на второй вход которого перед началом испытаний поступает сигнал с седьмого выхода модуля 17 ввода- вывода дискретных сигналов. Уровень сигнала соответствует допустимым граничным значениям изменений параметров состояния конструкции, которые, как правило, определяются при эксплуатационных испытаниях.
В процессе испытаний сигналы состояния конструкции с первого выхода преобразователя 21 сигналов состояния конструкции поступают на первый вход второго блока 22 динамического анализа, который производит сравнение фактических значений сигналов о состоянии конструкции с заданными допустимыми значениями и если обнаруживается выход за допустимые границы, вырабатывает сигнал, поступающий на второй вход модуля 17 ввода-вывода дискретных сигналов, по которому в ЭВМ инициируются программы обработки ситуации выхода значений параметров состояния конструкции за допустимые пределы: расшифровка сигнала, запоминание момента времени поступления сигнала, выдача на блок 19 отображения
информации сервисных (аварийных) сообщений.
В процессе испытаний на блок 19 отображения информации выводятся результаты испытаний (оперативные, промежуточные, итоговые): текущие значения, графики, статистические характеристики, таблицы и рекомендации о проведении испытаний.
Таким образом, в процессе работы стенда осуществляется контроль точности, достоверности и воспроизводимости процесса нагружения, а также создается полная информативность о процессе нагружения, состоянии конструкции. Расшифровка причин
нарушения вопроизводимости закона нагружения из-за изменения состояния конструкции в процессе испытаний или из-за неисправности канала нагружения, обнаруживаемых блоками динамического анализа,
повышает точность испытаний и качество процесса управления.
Формула изобретения
Стенд для испытания конструкций по авт. св. № 1283569,отличающийся тем, что, с целью повышения точности и информативности, он снабжен последовательно соединенными датчиками состояния, предназначенными для установки на конструк- цию, преобразователем сигналов состояния, второй выход которого соединен с первым дополнительным входом ЭВМ. и вторым блоком динамического анализа, второй вход которого соединен с первым дополнительным выходом ЭВМ, а выход - с вторым дополнительным входом ЭВМ, и блоком отображения информации, соединенным с ЭВМ.
| Стенд для испытания конструкций | 1985 |
|
SU1283569A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
