Изобретение относится к измерительной технике, а именно к средствам контроля гироскопических датчиков угловой скорости (ДУС).
Известен стенд для контроля прецизионных датчиков угловых скоростей, содержащий основание для закрепления на нем с возможностью вращения вокруг измерительной оси стенда контролируемого измерителя угловой скорости с датчиками угла и момента, соединенными через усилитель обратной связи и расположенными по выходной оси датчика угловой скорости, коллектор подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения, сумматор и усилитель стабилизации, соединенные последовательно, фотоэлектрический муаровый датчик угла, расположенный на оси вращения стенда, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, соединенные последовательно, блок преобразования информации датчика угловой скорости, электродвигатель постоянного тока, выполненный по бесконтактной схеме синусно-косинусного вращающего трансформатора, когда вход блока преобразования информации датчика угловой скорости и первый вход сумматора соединены с выходом усилителя обратной связи, а выход задатчика эталонного напряжения соединен со вторым входом сумматора, причем первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами усилителя стабилизации [5, 6, 8].
В известном стенде, построенном по аналогии с одноосным гироскопическим стабилизатором и датчиком угловой скорости в качестве инерциального чувствительного элемента, где контролируемый ДУС одновременно является и чувствительным элементом, и испытуемым прибором, т.е. находится в режиме «самоконтроля», были достигнуты следующие положительные результаты по сравнению с ранее известными аналогами:
- чувствительность разработанного стенда, т.е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента контролируемого ДУС, определялась не моментами трения на оси вращения стенда и коэффициентом трения в редукции, а моментами сопротивления на оси прецессии контролируемого ДУС, т.е. величиной на несколько порядков меньшей, чем в ранее известных технических решениях;
- повышение точности и стабильности задаваемой стендом угловой скорости обеспечивалось за счет наличия в предлагаемом стенде двухконтурной системы управления, что дало возможность за счет одного контура (системы обратной связи контролируемого ДУС) обеспечить устойчивость системы, повысив при этом во втором контуре (из условий достижения необходимой точности и стабильности задаваемой угловой скорости) коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем постоянного тока;
- использование самого контролируемого датчика угловой скорости в качестве чувствительного элемента стенда исключило необходимость введения в стенд собственных гироскопических чувствительных элементов, что повысило точность и стабильность задаваемой угловой скорости, как постоянной по величине, так и гармонически изменяющейся, за счет исключения вибрационного взаимовлияния двух гироскопов, а также за счет того, что практически обеспечивалось отсутствие сдвига фаз между выходной информацией ДУС (считываемой с выхода усилителя обратной связи) и выходной информацией о задаваемой угловой скорости (считываемой с информационного фотоэлектрического датчика угла), что делало результаты контроля величины масштабного коэффициента инвариантными к помехам, т.к. масштабный коэффициент есть отношение упомянутых информации, и, если имела место помеха, то она содержалась в обеих информациях и исключалась в их отношении;
- использование фотоэлектрического муарового датчика угла в качестве информационного датчика стенда обеспечивало высокоточное измерение задаваемой угловой скорости, что и определило точные характеристики стенда;
- возможность контроля АЧХ и ФЧХ на стенде, т.е. расширение функциональных возможностей, обеспечивалось безредукторным исполнением привода и отсутствием возбудителей вибрационных взаимовлияний элементов стенда, искажающих задаваемые вокруг оси стенда гармонические колебания;
- стенд позволил производить измерение масштабного коэффициента ДУС при повороте его подвижной части вокруг оси стенда на любой угол (значительно меньший оборота), что сократило время испытания без снижения точности контроля, как это имело место в ранее известных технических решениях.
Несмотря на вышеприведенные достоинства аналог не свободен от недостатков, заключающихся в следующем:
1. Стенд предназначен для контроля ДУС только одного типа - электромеханических датчиков угловой скорости с электрической обратной связью, а испытания измерителей угловой скорости иного класса и принципа действия, таких как лазерные, волоконно-оптические, волновые твердотельные и др., на данном стенде невозможны. Вместе с тем, упомянутые выше проблемы, возникающие при испытаниях электромеханических ДУС, свойственны испытаниям измерителей угловой скорости всех остальных типов.
2. Стенд рассчитывался как единая двухконтурная система автоматического управления, т.е. «самоконтролю» могли подвергаться электромеханические измерители угловой скорости лишь одного типа с неизменной структурой регулятора. Контроль электромеханического ДУС другого типа с иной структурой регулятора требовал пересчета всей системы управления.
3. Фотоэлектрический муаровый датчик угла имеет динамические ошибки, возрастающие при увеличении угловой скорости свыше 30%; таким образом, на стенде могли контролироваться электромеханические датчики угловой скорости ограниченного диапазона измерения угловых скоростей [13].
4. Стенд обладал аналоговой системой управления, что исключало ее модернизацию без изменения элементной базы и структуры и соответственно требовало разработки новой системы управления при модернизации стенда.
5. Стенд имел возможность задания либо постоянных по величине и направлению, либо гармонически изменяющихся угловых скоростей, но не имел возможности задания их программным способом по любому требуемому закону.
6. ЭВМ в стенде являлась регистрирующим, но не управляющим устройством, что было обусловлено развитием вычислительной техники в момент подачи заявки на аналог и недостаточными ресурсами процессора, что значительно ограничивало возможности стенда.
Наиболее близким к заявляемому объекту аналогом по совокупности существенных признаков является стенд для контроля измерителей угловой скорости, содержащий корпус; траверсу, закрепленную на корпусе с возможностью вращения; двигатель постоянного тока, содержащий датчик положения, и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов; устройство питания элементов, закрепленных на траверсе; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения траверсы, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости; управляющий процессор, содержащий в том числе порты ввода - вывода и ядро с дополнительной периферией, аналого-цифровой и цифроаналоговые преобразователи, которые могут быть как встроенными в процессор, так и внешними устройствами по отношению к процессору; усилитель мощности, вход которого соединен с выходом цифроаналогового преобразователя, соединенного своим входом с первым портом ввода - вывода управляющего процессора, а выход усилителя мощности соединен с входом системы управления двигателем постоянного тока; систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс со вторым портом ввода - вывода управляющего процессора; угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены с третьим портом ввода - вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда [9].
Стенд имел ряд преимуществ по сравнению с аналогами, заключающихся в следующем:
1. Значительно сократилась аналоговая элементная база функциональной электроники в регуляторе стенда, что позволило существенно уменьшить влияние смещений нулевых сигналов операционных усилителей на точностные характеристики стенда и тем самым обеспечить более высокую линейность и стабильность масштабного коэффициента стенда.
2. Дискретный регулятор, реализованный алгоритмически, позволил производить модернизацию системы управления стендом путем пересчета собственных параметров по синтезированному алгоритму и расширить функциональные возможности системы.
3. Фотоэлектрический муаровый датчик угла, имеющий высокие динамические погрешности при увеличении диапазона задаваемых угловых скоростей свыше 30%, заменен угловым энкодером, который не обладает подобными погрешностями. Если данные фотоэлектрического датчика угла после преобразования в интерполяторе фазовом и блоке преобразования информации обеспечивали цену углового разряда 0.31”, то угловой энкодер может надежно функционировать при угловых скоростях в сотни оборотов в минуту и обеспечивает цену углового разряда после обработки электроникой 0.1”-0.005” в зависимости от типа энкодера. Это позволяет значительно повысить точность измерения угла поворота и угловой скорости стенда и обеспечить возможность его использования в системе управления стенда.
4. Наличие в системе управляющего компьютера позволило задавать стенду любые программные движения, а не только постоянные по величине и направлению или изменяющиеся по гармоническому закону.
5. Применение одного и того же процессора в обратной связи ДУС и системе управления двигателем стенда позволяет применять алгоритмы компенсации погрешностей без ошибок, обусловленных обменом между вычислительными устройствами.
6. Использование высокопроизводительного процессора с тактовой частотой в десятки мегагерц с высокоточным таймером позволяет вычислять с высокой точностью угловую скорость стенда по информации углового энкодера, которая может вноситься в качестве поправки в управляющий сигнал измерительного датчика угловой скорости по мажоритарному принципу.
Однако, несмотря на приведенные достоинства, прототип не свободен от недостатков, заключающихся в следующем:
1. Моменты трения по оси вращения траверсы, обусловленные влиянием трения в щетках коллектора для подвода питания, не были компенсированы вследствие того, что сам коллектор имел большое число колец, используемых для питания и съема информации как чувствительного элемента, так и испытуемого прибора, а некоторые из колец должны были быть рассчитаны на значительные величины токов, что также повышало значения момента трения в коллекторе.
2. Точностные характеристики стенда зависели от точностных характеристик инерциального чувствительного элемента и в случае его замены требовались изменение конструкции стенда и пересчет дискретного регулятора.
3. В случае испытания на стенде измерителя угловой скорости более высокого класса точности, нежели инерциальный чувствительный элемент, возрастали погрешности в определении масштабного коэффициента контролируемого прибора.
Задачей изобретения является разработка стенда для контроля измерителей угловой скорости с цифровой системой управления двигателем для расширения функциональных возможностей стенда путем обеспечения самоконтроля масштабного коэффициента у инерциальных измерителей угловой скорости различных типов, каждый из которых одновременно является чувствительным элементом стенда и испытуемым прибором, универсализации конструкции стенда и снижения моментов трения, действующих по оси вращения траверсы, обеспечивающего повышение точности воспроизведения угловых скоростей.
Технический результат достигается тем, что в стенд для контроля измерителей угловой скорости, содержащий корпус; траверсу, закрепленную на корпусе с возможностью вращения; двигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов; устройство питания элементов, закрепленных на траверсе; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения траверсы, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости; управляющий процессор, содержащий в том числе порты ввода - вывода и ядро с дополнительной периферией, аналого-цифровой и цифроаналоговые преобразователи, которые могут быть как встроенными в процессор, так и внешними устройствами по отношению к процессору; усилитель мощности, вход которого соединен с выходом цифроаналогового преобразователя, соединенного своим входом с первым портом ввода - вывода управляющего процессора, а выход усилителя мощности соединен с входом системы управления двигателем постоянного тока; систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс со вторым портом ввода - вывода управляющего процессора; угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены с третьим портом ввода - вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда, вводятся закрепленные на вращающейся траверсе: блок преобразования напряжения питания, блок преобразования информации, содержащий аналого-цифровой преобразователь и программируемую логическую интегральную схему, шина блока преобразования информации, микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором, при этом вход преобразователя напряжения питания посредством жгута, проходящего через центр полой траверсы, либо через вращающийся трансформатор соединен с выходом стационарного источника питания, а выходы преобразователя напряжения соединены с соответствующими входами блоков, закрепленных на траверсе; вход шины блока преобразования информации соединен с выходом измерительного датчика угловой скорости, первый выход шины блока преобразования информации соединен с входом программируемой логической интегральной схемы, а второй выход - с входом аналого-цифрового преобразователя блока преобразования информации; выходы программируемой логической интегральной схемы и аналого-цифрового преобразователя блока преобразования информации соединены соответственно с первым и вторым входами микроконтроллера, содержащего интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу; выход приемника инфракрасного или радиочастотного сигнала соединен с четвертым портом ввода - вывода управляющего процессора, при этом в управляющем процессоре алгоритмически реализован контур адаптации системы управления двигателем к изменению типа устанавливаемого инерциального чувствительного элемента (измерительного датчика угловой скорости) и момента инерции подвижной части стенда.
В качестве инерциального чувствительного элемента, одновременно являющегося испытываемым прибором, использован прецизионный гироскопический измеритель угловой скорости любого типа (электромеханический датчик угловой скорости с электрической обратной связью, лазерный, волоконно-оптический, волновой твердотельный, динамически настраиваемый).
Совокупность существенных признаков, характеризующих заявляемое техническое устройство, позволяет в сравнении с прототипом достичь технического результата, заключающегося в следующем:
1. Обеспечивается универсальность стенда, так как без конструктивных изменений, только за счет перепрограммирования процессора, можно обеспечить самоконтроль гироскопического датчика угловой скорости любого физического принципа действия;
2. Уменьшены моменты трения в оси вращения стенда, т.е. повышена стабильность задания угловой скорости за счет исключения из конструкции стенда информационных колец токоподводящего коллектора (оставлены кольца для подвода питания) и введения в систему управления стенда беспроводной системы съема и передачи информации с помощью радиочастотных или инфракрасных информационных средств.
3. Исключена зависимость точностных характеристик стенда от типа инерциального чувствительного элемента, примененного в качестве измерительного датчика угловой скорости, так как в предлагаемой схеме обеспечен самоконтроль датчика угловой скорости, являющегося одновременно и чувствительным элементом, и испытуемым прибором, что также снижает себестоимость стенда.
4. Применение радиочастотного или инфракрасного информационного канала позволяет существенно сократить число соединений в электрической схеме стенда, и при этом исключаются ошибки передачи данных, возникающие вследствие возможной потери контакта в щеточном узле токоподводящего коллектора.
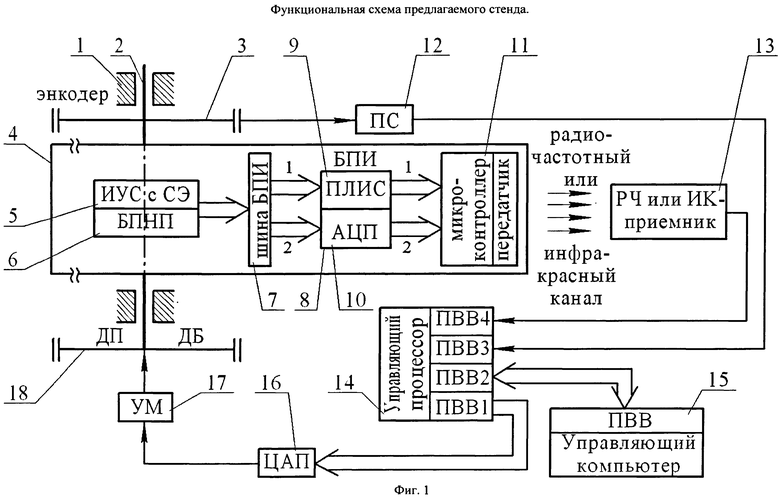
На фиг.1 представлены основные конструктивные элементы стенда. В корпусе стенда на шарикоподшипниках 1 подвешена рама 4 с траверсой 2, ось вращения которой вертикальна. На траверсе 2 закреплен измерительный датчик угловой скорости 5, в качестве которого могут быть использованы поплавковый гироскопический датчик угловой скорости (ДУС), волоконно-оптический гироскоп (ВОГ), лазерный гироскоп (ЛГ), волновой твердотельный гироскоп (ВТГ), динамически настраиваемый гироскоп (ДНГ) со своей сервисной электроникой. На оси вращения траверсы 2 закреплена подвижная часть двигателя постоянного тока ДП-ДБ 18, неподвижная часть которого размещена на корпусе стенда. На оси траверсы 2 закреплен диск углового энкодера 3, считывающие головки которого закреплены на корпусе стенда. На траверсе закреплены: блок преобразования напряжения питания (БПНП) 6, вход которого соединен с выходом стационарного источника питания через жгут, проходящий внутри полой траверсы, через коллектор или вращающийся трансформатор, а выходы - с соответствующими входами блоков, закрепленных на траверсе; блок преобразования информации (БПИ) 8, в состав которого входят программируемая логическая интегральная схема (ПЛИС) 9 и аналого-цифровой преобразователь (АЦП) 10; шина блока преобразования информации 7, вход которой соединен с выходом измерительного датчика угловой скорости 5, первый выход - с входом ПЛИС 9, а второй выход - с входом АЦП 10, и микроконтроллер 11, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу. На корпусе стенда в виде плат закреплена электронная часть системы управления стендом - блок управления (БУ).
В БУ входят:
- управляющий процессор 14, содержащий в том числе порты ввода - вывода и ядро с дополнительной периферией;
- приемник инфракрасного или радиочастотного сигналов 13, выход которого соединен с четвертым портом ввода - вывода управляющего процессора 14;
- цифроаналоговый преобразователь (ЦАП) 16, который может быть как встроенным в управляющий процессор 14, так и быть по отношению к нему внешним устройством, причем вход ЦАП 16 (в случае внешнего устройства) соединен с первым портом ввода - вывода управляющего процессора 14;
- усилитель мощности (УМ) 17, вход которого соединен с выходом ЦАП 16, а выход - с обмотками ДП-ДБ 18.
Выход углового энкодера 3 соединен с входом преобразователя сигнала ПС 12, выход которого соединен с третьим портом ввода - вывода управляющего процессора 14. Порт ввода - вывода управляющего компьютера 15 соединен через стандартный интерфейс со вторым портом ввода - вывода управляющего процессора 14.
Закрепление на платформе стенда плат, реализующих перечисленные блоки, а также применение радиочастотного или инфракрасного канала для информационного обмена позволяет сократить число линий коллектора до двух, необходимых для подвода питания к БПНП 6, что повышает точностные характеристики стенда. Это обусловлено:
- снижением момента трения от коллектора на оси вращения платформы, т.е. повышается стабильность задания угловой скорости; уменьшением длины линий электрических цепей от ИУС 5 до электронного блока системы управления и уровня помех, поскольку не требуется передача маломощных сигналов через кольца коллектора.
- Предлагаемый стенд (фиг.1) работает следующим образом. С управляющего компьютера 15 во второй порт ввода вывода ПВВ2 управляющего процессора 14 поступает код, пропорциональный задаваемому управляющему напряжению Uзад. Из второго порта ввода - вывода ПВВ2 код передается в ядро процессора 14, где алгоритмически реализован сумматор сигналов, а оттуда через первый порт ввода - вывода ПВВ1 управляющего процессора 14 - на вход ЦАП 16, реализованный на фиг.1 как внешнее по отношению к управляющему процессору 14 устройство. С выхода ЦАП 16 соответствующее этому коду напряжение через усилитель мощности (УМ) 17 поступает на датчик положения - двигатель бесконтактный (ДП-ДБ) 18. Двигатель ДП-ДБ 18 задает траверсе стенда 2 вращение с угловой скоростью, пропорциональной подаваемому управляющему напряжению Uзад. Измеритель угловой скорости 5, являющийся одновременно и чувствительным элементом стенда, и испытуемым прибором, измеряет заданную угловую скорость и формирует на своем выходе сигнал, пропорциональный заданной угловой скорости. В случае если выходной сигнал ИУС 5 имеет аналоговую форму, то он поступает на вход АЦП 10 БПИ 8, а если цифровую, то - на вход ПЛИС 9 БПИ 8. С выхода АЦП 10 сигнал поступает на второй вход микроконтроллера 11, а с выхода ПЛИС 9 - на первый вход микроконтроллера 11. Микроконтроллер формирует кодовую комбинацию, поступающую в формирователь инфракрасного либо радиочастотного сигнала, встроенный в микроконтроллер, данный сигнал поступает на приемник радиочастотной или инфракрасной информации 13, с выхода которого, преобразованный в код, он поступает в четвертый порт ввода - вывода ПВВ4 управляющего процессора 14. Из четвертого порта ввода - вывода ПВВ4 управляющего процессора 14 код поступает в ядро процессора 14, где в виде алгоритма запрограммирован цифровой регулятор соответствующего измерительного датчика угловой скорости, обеспечивающий требуемые динамические характеристики ИУС 5 - чувствительного элемента стенда. Преобразовавшись в регуляторе, сигнал об измеренной ИУС 5 угловой скорости сравнивается в алгоритмически реализованном сумматоре управляющего процессора 14 с заданным значением угловой скорости, поступившим в виде входного воздействия по стандартному интерфейсу через второй порт ввода - вывода ПВВ2 управляющего процессора 14 от управляющего компьютера 15; в сумматоре формируется разностный управляющий сигнал, который поступает на вход цифрового регулятора системы управления двигателем, запрограммированного в виде алгоритма в управляющем процессоре 14 и обеспечивающего требуемые динамические характеристики системы управления двигателем 18 стенда. При этом преобразованный управляющий сигнал поступает на ЦАП 16, откуда в виде аналогового сигнала - на усилитель мощности УМ 17, а оттуда - на ДП-ДБ 18. Таким образом, реализуется цифровая система управления через управляющий процессор 14, работающая по разностному принципу: как только разностный управляющий сигнал стремится к нулю, траверса 2 стенда вращается с заданной угловой скоростью. При подаче с управляющего компьютера 15 гармонического или любого другого сигнала система работает аналогичным образом.
С углового энкодера 3 через преобразователь сигнала (ПС) 12 последовательность импульсов, число которых пропорционально углу поворота платформы стенда, поступает в третий порт ввода - вывода ПВВЗ управляющего процессора 14. В управляющем процессоре 14 происходит вычисление угловой скорости стенда как отношения измеренного угла ко времени опроса, измеряемого таймером процессора 14. Использование таймера управляющего процессора 14, а не управляющего компьютера 15 связано с тем, что, как правило, в управляющем компьютере используются операционные системы, не являющиеся системами реального времени, а поэтому не обеспечивающие необходимую точность отсчета интервалов времени для вычисления угловой скорости стенда. Полученная информация через второй порт ввода - вывода ПВВ2 управляющего процессора 14 через стандартный интерфейс поступает в порт ввода - вывода управляющего компьютера 15. По тому же каналу поступает информация об угловой скорости, измеренной ДУС 5 - испытуемым прибором. В управляющем компьютере 15 происходит комплексная обработка полученных данных об угле и угловой скорости, заданной стендом, и выходной информации ДУС 5, что позволяет формировать выходную информацию о масштабном коэффициенте и динамических характеристиках испытуемого прибора ДУС 5 (в случае подачи на вход системы управления стендом гармонического сигнала). Таким образом, осуществляется самоконтроль измерителя угловой скорости ДУС 5.
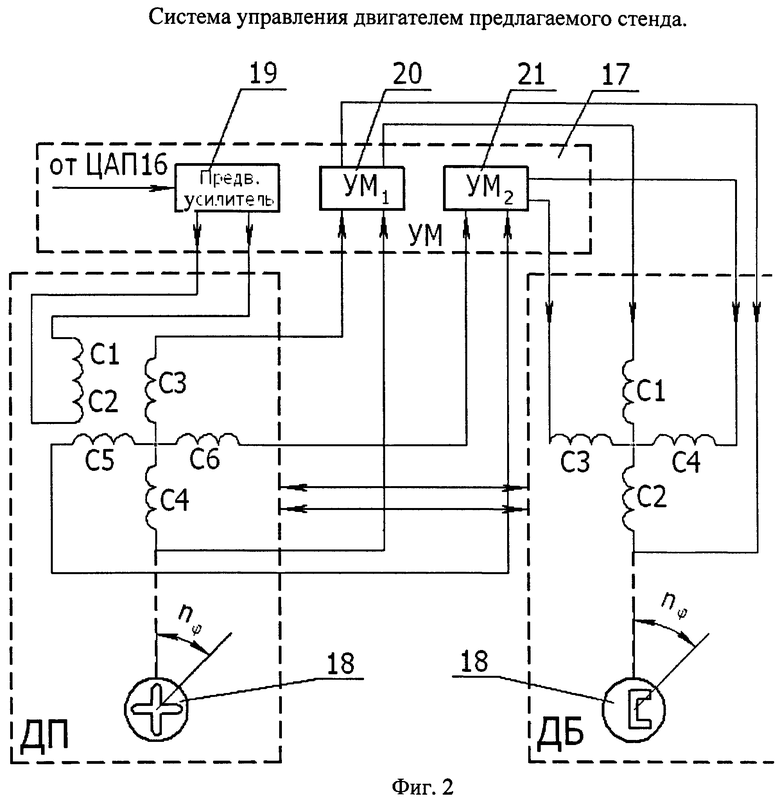
Работа системы управления двигателем по разностному сигналу, сформированному в процессоре, описана в прототипе [9] и соответствует фиг.2, на которой представлена функциональная схема системы управления двигателем предлагаемого стенда. Неподвижные части датчика положения (ДП) и двигателя бесконтактного (ДБ) 18 соединены в одном корпусе, жестко закрепленном на корпусе стенда. Датчик положения (ДП) 18 представляет собой синусно-косинусный вращающий трансформатор с безобмоточным ротором (С1-С2 - обмотка возбуждения, СЗ-С4 - синусная обмотка, С5-С6 - косинусная обмотка). Двигатель постоянного тока бесконтактный 18 также имеет косинусную и синусную обмотки (С1-С2 и С3-С4) [9].
Усилитель мощности (УМ) 17 содержит предварительный усилитель 19 и два идентичных каскада усилителя мощности - УМ1 20 и УМ2 21. Предварительный усилитель 19 предназначен для модуляции и усиления постоянного сигнала, поступающего от ЦАП 16, выполнен на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Каждый из усилителей УМ1 20 и УМ2 21 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью [3, 5, 11].
Каскады УМ 17 - УM1 20 и УМ221 и двигатель ДП-ДБ 18 соединены следующим образом. Выход предварительного усилителя 19 соединен с обмоткой возбуждения С1-С2 датчика положения ДП 18. Обмотка датчика положения С3-С4 соединена с входом каскада УМ1 20 усилителя мощности УМ 17, а обмотка С5-С6 соединена с входом каскада УМ2 21 усилителя мощности УМ 17. Выходы каскадов 20 и 21 УМ соединены соответственно с синусной и косинусной обмотками С1-С2 и С3-С4 двигателя ДБ 18.
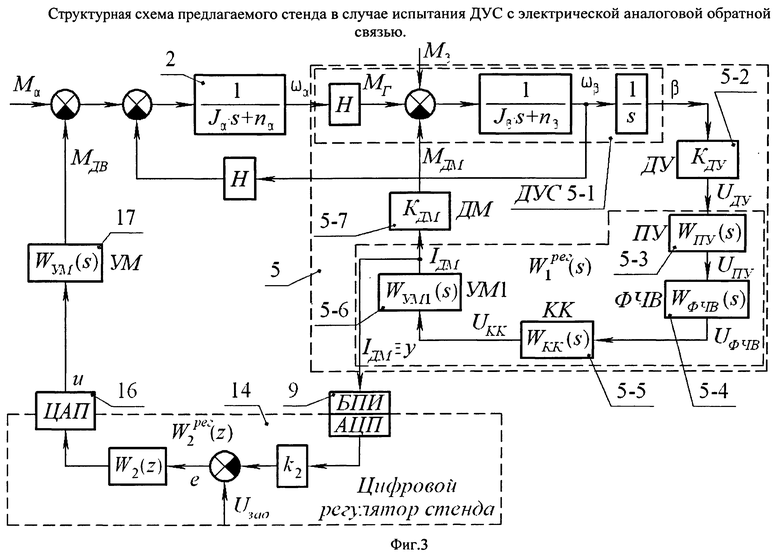
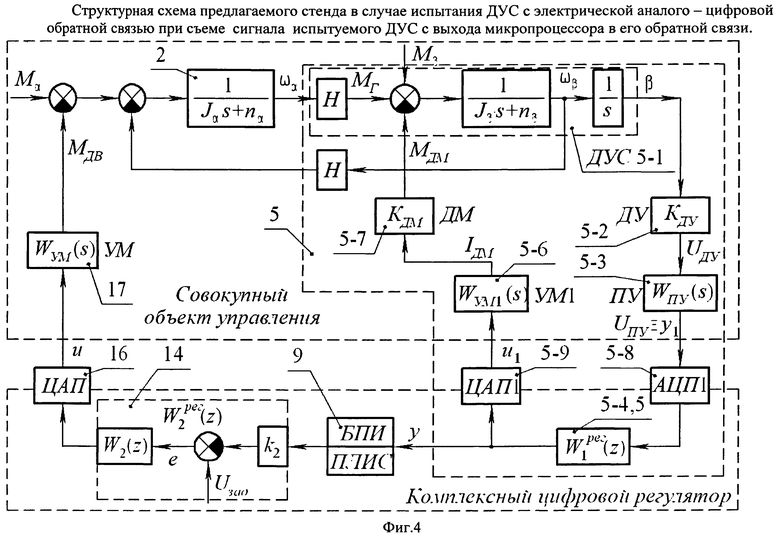
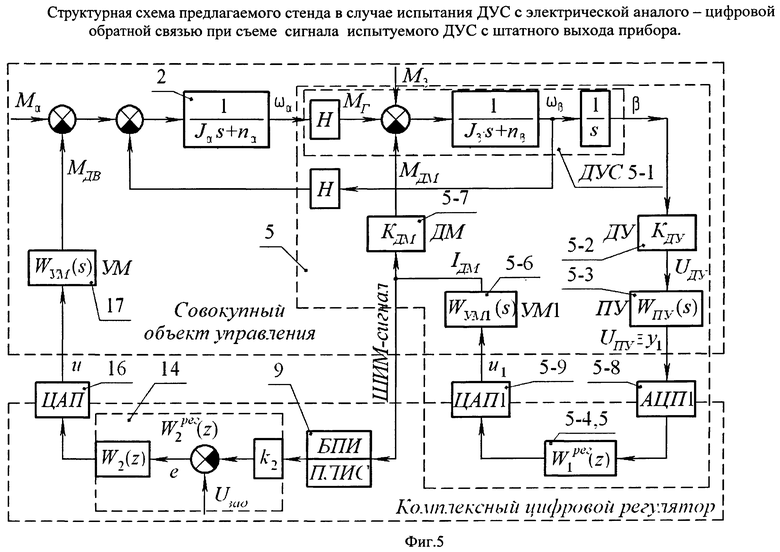
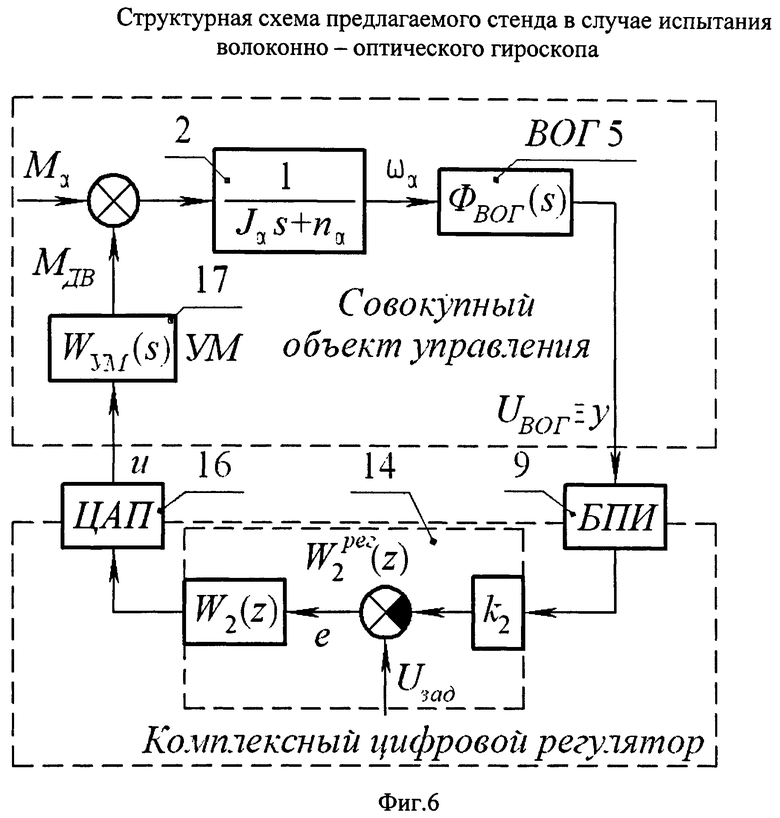
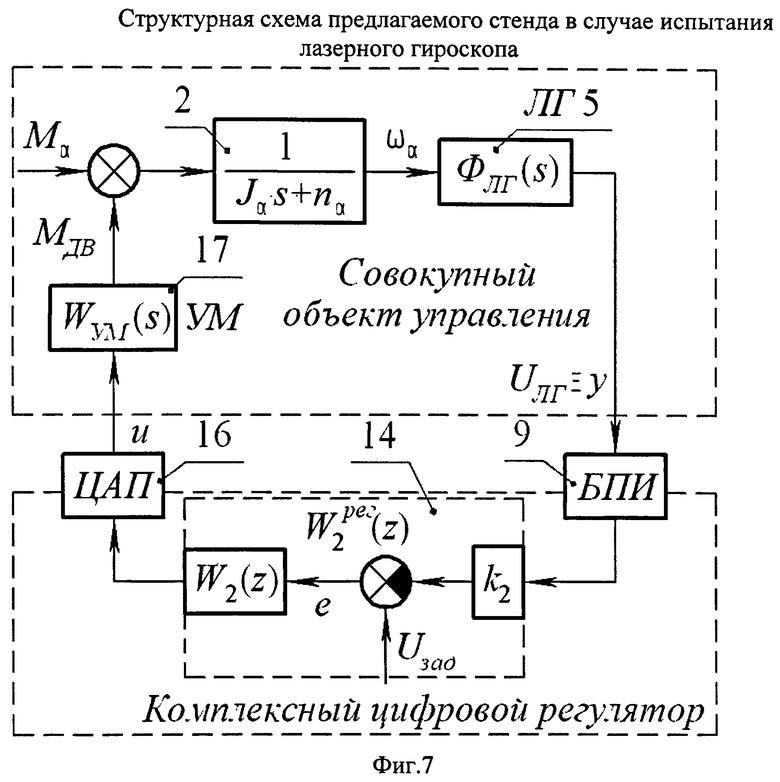
На фиг.3-7 представлены структурные схемы предлагаемого стенда с измерителями угловой скорости, находящимися в режиме самоконтроля. На фиг.3 показана структурная схема предлагаемого стенда в случае испытания ДУС с электрической аналоговой обратной связью. На фиг.4 - структурная схема предлагаемого стенда в случае испытания ДУС с электрической аналого-цифровой обратной связью при съеме сигнала испытуемого ДУС с выхода микропроцессора в его обратной связи. На фиг.5 - структурная схема предлагаемого стенда в случае испытания ДУС с электрической аналого-цифровой обратной связью при съеме сигнала испытуемого ДУС с выхода прибора. В данном случае возможна организация широтно-импульсного управления работой двигателя ДП-ДБ 18 предлагаемого стенда. На фиг.6 - структурная схема предлагаемого стенда с волоконно-оптическим гироскопом, находящимся в режиме самоконтроля. На фиг.7 - структурная схема предлагаемого стенда с лазерным гироскопом, находящимся в режиме самоконтроля. На фиг.7 не приведены системы стабилизации периметра кольцевого резонатора и токов в плечах газового разряда, возбуждающего активную среду лазера, поскольку их наличие не влияет на работу стенда.
Принципиальным отличием от прототипа [9] является универсальность предлагаемого стенда, который позволяет проводить испытания ДУС любого типа, поскольку система управления двигателем стенда допускает различные структуры обратной связи испытуемого ДУС, являющегося одновременно и чувствительным элементом стенда. В прототипе обратная связь является двухконтурной, т.е. реализованной через один процессор, где программировались цифровые регуляторы как инерциального чувствительного элемента - ДУС с электрической обратной связью, так и стенда. В предлагаемом стенде ДУС 5 обладает собственной обратной связью и связан с контуром управления стендом через выходной сигнал (фиг.3 и 5) или же сигнал с процессора в собственном контуре управления (фиг.6). В случае испытаний ВОГ и ЛГ (фиг.7 и 8), не имеющих систему обратной связи в ее классическом варианте, связь с контуром управления стендом осуществляется через выходной сигнал ВОГ и ЛГ.
На фиг.3-7 цифрами обозначены функциональные элементы системы в соответствии с обозначениями на фиг.1. Функциональные элементы ДУС 5 с электрической обратной связью (фиг.3-5) имеют двойное обозначение, например, 5-1 - механическая часть ДУС.
Введены следующие обозначения, общие для всех структурных схем по фиг.3-7.
Iα=10-25 г·см·с2 - момент инерции траверсы 2 стенда в зависимости от типа испытуемого прибора;
nα=20-40 г·см·с - момент скоростного демпфирования траверсы 2 стенда;


Вариации величин Iα и nα обусловлены минимальными и максимальными значениями моментов инерции и скоростного демпфирования для различных приборов. Так, например, момент инерции ДУС КХ79-060 Iα=8 г·см·с2, что дает момент инерции траверсы стенда Iα=10 г·см·с2, а момент инерции лазерного гироскопа ЛГ-1 Iα=22 г·см·с2, что дает момент инерции траверсы стенда Iα=25 г·см·с2. Та же логика заложена при вариации значений моментов скоростного демпфирования nα.
Общими для всех структурных схем также являются ЦАП 16 и БПИ (ПЛИС/АЦП) 9.
Устройства ЦАП1 5-9, АЦП-1 5-8 являются общими для всех структурных схем по фиг.3-5 в случае испытания ДУС с электрической обратной связью. Кроме того, общими являются также следующие обозначения;
ωα - угловая скорость вращения платформы 3 стенда;
Мг=Н·ωα - гироскопический момент измерительного ДУС 5 - чувствительного элемента стенда;
Mβ - момент сопротивления, действующий по оси прецессии измерительного ДУС 5 - чувствительного элемента стенда;
Мдм=kдм·iдм - парирующий момент датчика момента измерительного ДУС 5 - чувствительного элемента стенда;
iдм - ток в цепи обратной связи измерительного ДУС 5 - чувствительного элемента стенда, пропорциональный измеряемой угловой скорости;
ωβ - угловая скорость прецессии гироузла измерительного ДУС 5 - чувствительного элемента стенда;
β - угол прецессии гироузла 7 измерительного ДУС 5 - чувствительного элемента стенда;
Uду - переменное напряжение на выходе датчика угла 9 измерительного ДУС 5 - чувствительного элемента стенда;
y - напряжение на выходе предварительного усилителя 13 в цепи обратной связи измерительного ДУС 5 - чувствительного элемента стенда;
u1 - управляющее напряжение с выхода ЦАП1 18 в цепи обратной связи измерительного ДУС 5 - чувствительного элемента стенда;
Uзад - задающее воздействие, поступающее в виде кода в порт ввода - вывода 17 управляющего процессора 15 от управляющего компьютера 26;
е - разностный сигнал ошибки управления;
u2 - управляющее напряжение с выхода ЦАП2 16 в цепи обратной связи стенда;
Мдв - момент, формируемый двигателем бесконтактным (ДБ) 18 стенда;
Мα - момент сопротивления по оси вращения траверсы 2 стенда;
Iβ=0.286 г·см·с2- момент инерции гироузла 5-1 измерительного ДУС 5 - чувствительного элемента стенда;
nβ=33 г·см·с - момент жидкостного демпфирования измерительного ДУС 5 - чувствительного элемента стенда;
Н=65 г·см·с - кинетический момент измерительного ДУС 5 - чувствительного элемента стенда;
 - коэффициент передачи датчика угла 5-2 измерительного ДУС 5 - чувствительного элемента стенда;
- коэффициент передачи датчика угла 5-2 измерительного ДУС 5 - чувствительного элемента стенда;
 - коэффициент передачи датчика момента 5-7 измерительного ДУС 5 - чувствительного элемента стенда;
- коэффициент передачи датчика момента 5-7 измерительного ДУС 5 - чувствительного элемента стенда;
 - оператор дифференцирования по Лапласу;
- оператор дифференцирования по Лапласу;

 - дискретная передаточная функция корректирующего контура цепи управления стенда, реализованная алгоритмически в процессоре 14, W2(z) - дискретная передаточная функция, k2 - коэффициент усиления корректирующего контура.
- дискретная передаточная функция корректирующего контура цепи управления стенда, реализованная алгоритмически в процессоре 14, W2(z) - дискретная передаточная функция, k2 - коэффициент усиления корректирующего контура.
Для структурной схемы (фиг.3) при испытании ДУС с электрической аналоговой обратной связью введены следующие обозначения.


Для структурных схем (фиг.4, 5) при испытании ДУС с электрической аналого-цифровой обратной связью введены следующие обозначения:
 - дискретная передаточная функция корректирующего контура измерительного ДУС с ФЧВ 5-4,5, реализованная алгоритмически в управляющем процессоре 14, которая заменяет передаточные функции 5-4 WФЧВ(s) и 5-5 Wкк(s) (фиг.3).
- дискретная передаточная функция корректирующего контура измерительного ДУС с ФЧВ 5-4,5, реализованная алгоритмически в управляющем процессоре 14, которая заменяет передаточные функции 5-4 WФЧВ(s) и 5-5 Wкк(s) (фиг.3).
Структурные схемы в случае испытания волоконно-оптического и лазерного гироскопа представлены на фиг.6, 7. Они имеют аналогичную структуру. Различными являются лишь измерители угловой скорости 5 - ВОГ или ЛГ. В качестве аппроксимированной передаточной функции ВОГ взята передаточная функция ВОГ КХ34-018 (разработка «ПО Корпус», г. Саратов), в качестве передаточной функции лазерного гироскопа - аппроксимированная передаточная функция прибора ЛГ-1 (разработка ОАО «МИЭА», г. Москва).


k=257,5 - коэффициент передачи усилителя;
kω - масштабный коэффициент ЛГ;
T1=0.001 с - постоянная времени фотодиода; Т2=1/(2·π·1050)=1,52·10-4, с - постоянная времени усилителя; ξ=0,625 - декремент затухания.
При синтезе цифрового регулятора использовались методы LQD - оптимизации и цифровой фильтрации теории синтеза дискретных систем управления [4, 7, 10], а при синтезе корректирующих контуров аналоговой части системы управления стендом - методы классической теории автоматического управления [1, 2].
Вследствие того что в основном контуре стенда присутствует одна существенная инерционность с постоянной времени Tпл=Jα/nα, все остальные постоянные времени основного контура оказываются, как минимум, на порядок меньше. Отсюда, с учетом требования астатизма наиболее рациональным является ПИ-регулятор, который в аналоговом варианте может быть представлен следующей передаточной функцией

где k2 - коэффициент, выбирающийся таким образом, чтобы обеспечить общий масштабный коэффициент стенда Kω=ω0/Uзад (в данном случае этот параметр принимается равным  . Выбор данного масштабного коэффициента взят как пример, чтобы показать идентичность результатов при синтезе регуляторов, и привязан к электромеханическому ДУС КХ79-060, обладающему диапазоном измерения
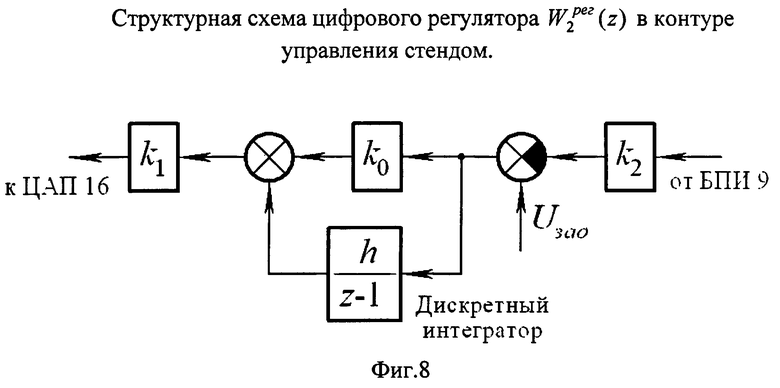
. Выбор данного масштабного коэффициента взят как пример, чтобы показать идентичность результатов при синтезе регуляторов, и привязан к электромеханическому ДУС КХ79-060, обладающему диапазоном измерения  . В принципе данный коэффициент может быть выбран любым (в зависимости от диапазона измерений инерциального чувствительного элемента), k0 и k1 - коэффициенты, выбираемые из условия устойчивости контура и хорошего качества переходных процессов. При этом принимается k0=Tпл, чтобы полностью скомпенсировать инерционность платформы, при этом на достаточно большом диапазоне частот ЛАЧХ разомкнутой системы будет иметь наклон - 20 дБ/дек, что соответствует наибольшим запасам устойчивости. Тогда коэффициент k1 выбирается из условия максимального быстродействия (наибольшей частоты среза) при сохранении заданных запасов устойчивости. Практически этот коэффициент определяется методом подбора при моделировании системы. При этом, поскольку частота среза оказывается значительно левее (почти на две декады) частоты квантования, которая при выбранном периоде дискретности h=0.001 с составляет 1 кГц, то для нахождения цифрового регулятора достаточно заменить непрерывный интегратор в формуле (9) на дискретный. Тогда, если учесть наличие в регуляторе сравнивающего элемента, то его структурная схема примет вид, показанный на фиг.8.
. В принципе данный коэффициент может быть выбран любым (в зависимости от диапазона измерений инерциального чувствительного элемента), k0 и k1 - коэффициенты, выбираемые из условия устойчивости контура и хорошего качества переходных процессов. При этом принимается k0=Tпл, чтобы полностью скомпенсировать инерционность платформы, при этом на достаточно большом диапазоне частот ЛАЧХ разомкнутой системы будет иметь наклон - 20 дБ/дек, что соответствует наибольшим запасам устойчивости. Тогда коэффициент k1 выбирается из условия максимального быстродействия (наибольшей частоты среза) при сохранении заданных запасов устойчивости. Практически этот коэффициент определяется методом подбора при моделировании системы. При этом, поскольку частота среза оказывается значительно левее (почти на две декады) частоты квантования, которая при выбранном периоде дискретности h=0.001 с составляет 1 кГц, то для нахождения цифрового регулятора достаточно заменить непрерывный интегратор в формуле (9) на дискретный. Тогда, если учесть наличие в регуляторе сравнивающего элемента, то его структурная схема примет вид, показанный на фиг.8.
В таблице 1 приведены значения коэффициентов цифрового регулятора для трех типов гироскопов - ЧЭ и испытуемых приборов стенда - ДУС с электрической обратной связью, ВОГ и ЛГ.
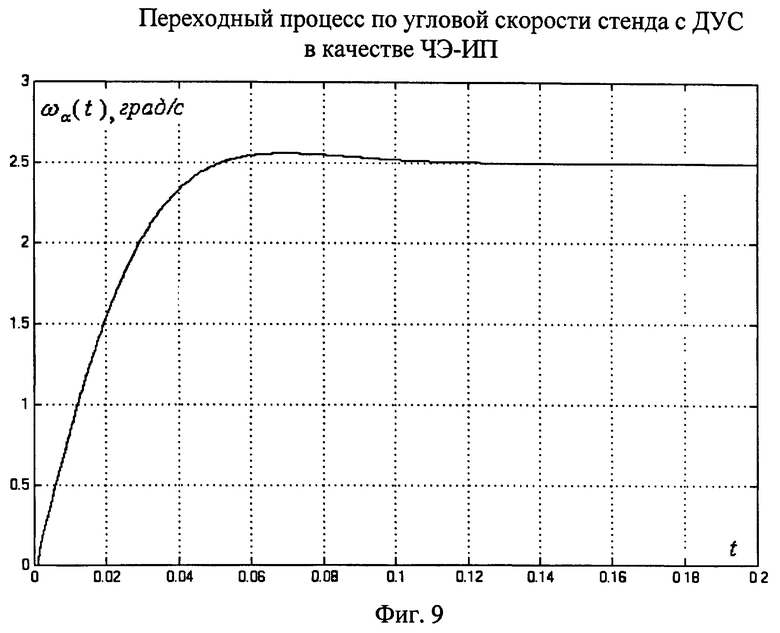
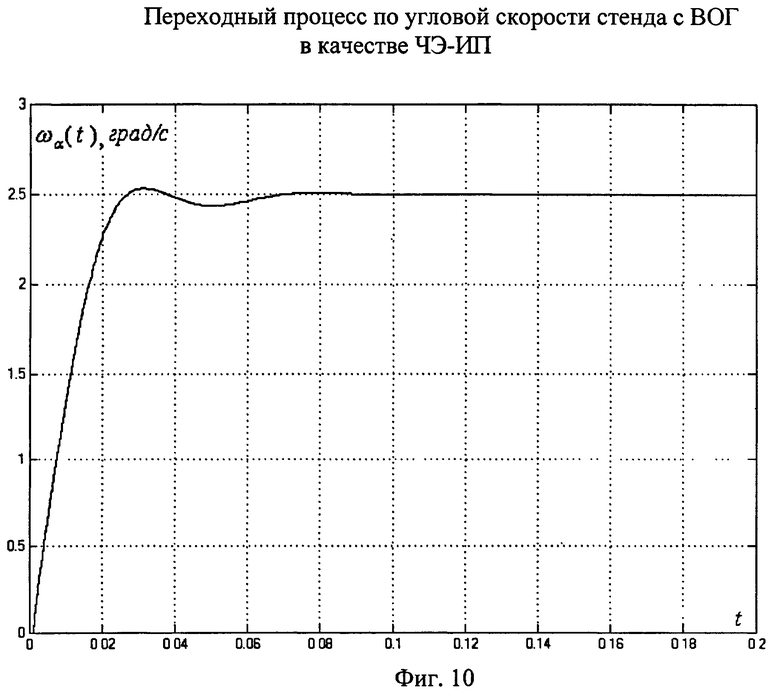
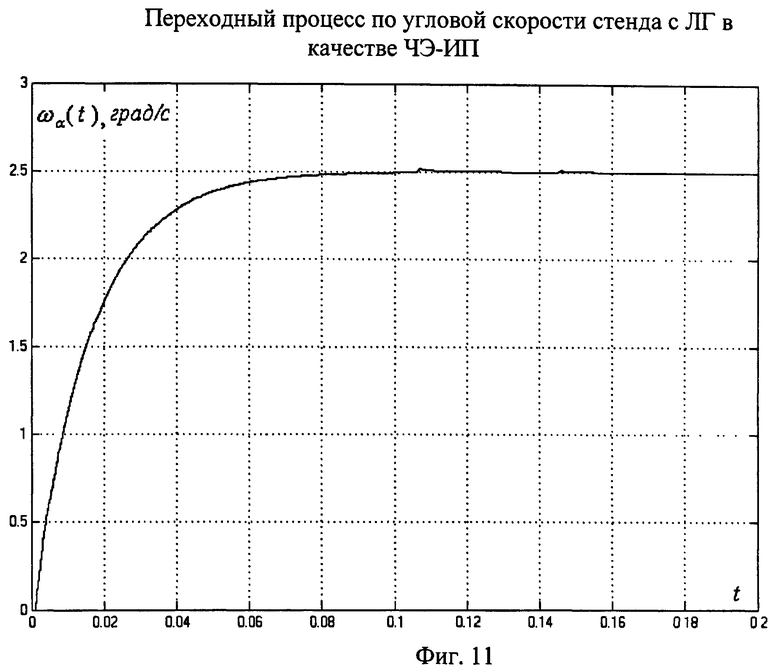
На фиг.9-11 показаны графики переходных процессов по угловой скорости стенда для трех различных типов гироскопов: ДУС с электрической обратной связью, ВОГ и ЛГ. Из графиков видно, что переходные процессы практически идентичны и время регулирования не превышает 0,1 сек.
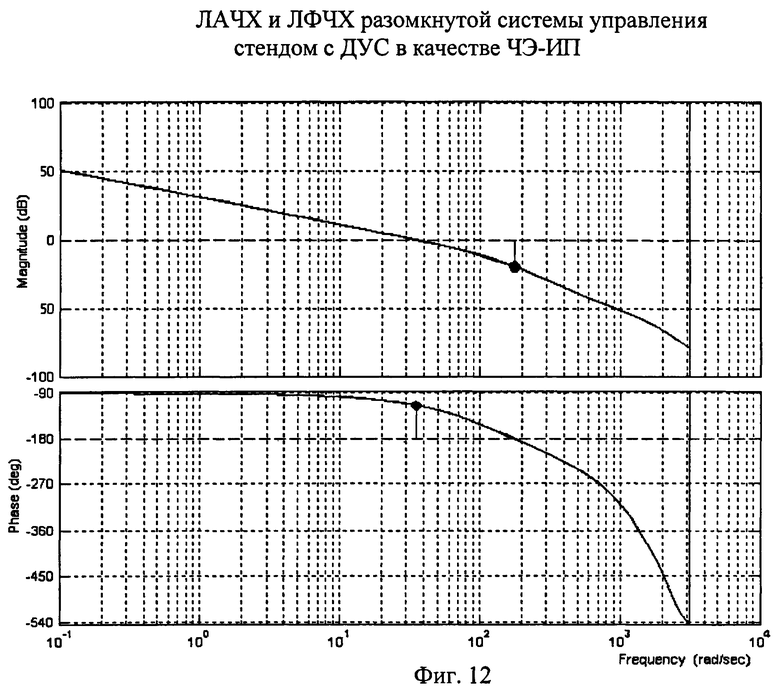
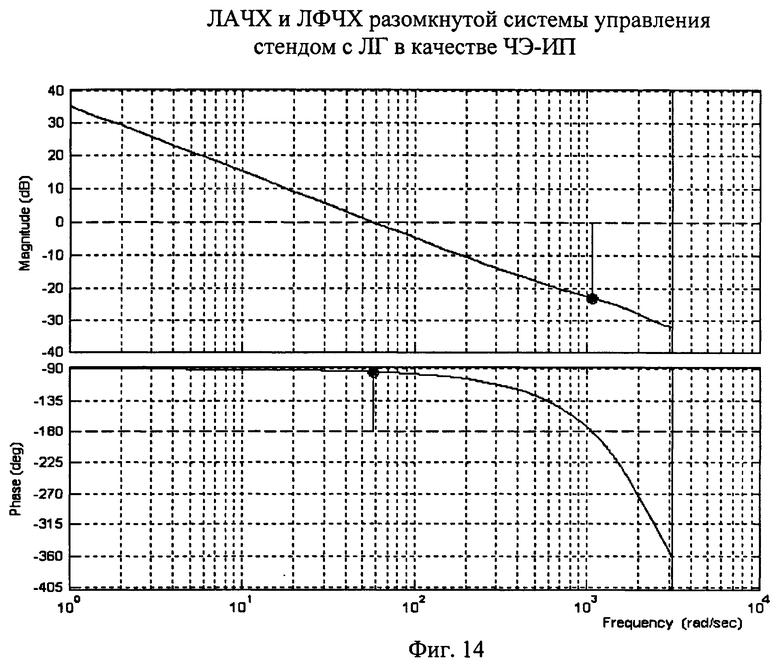
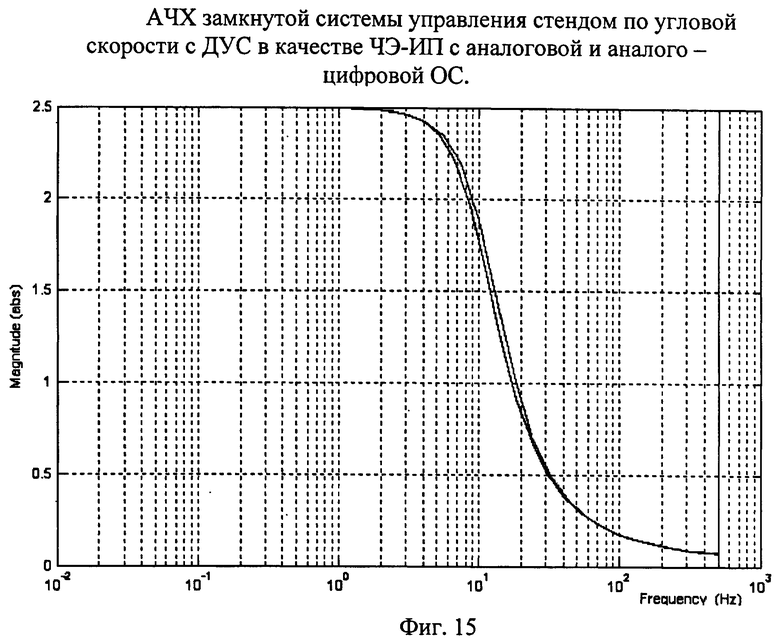
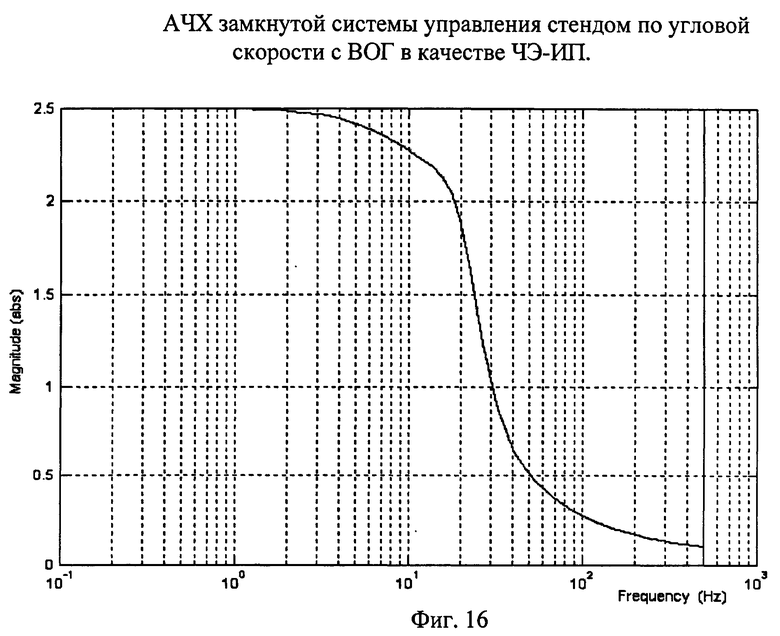
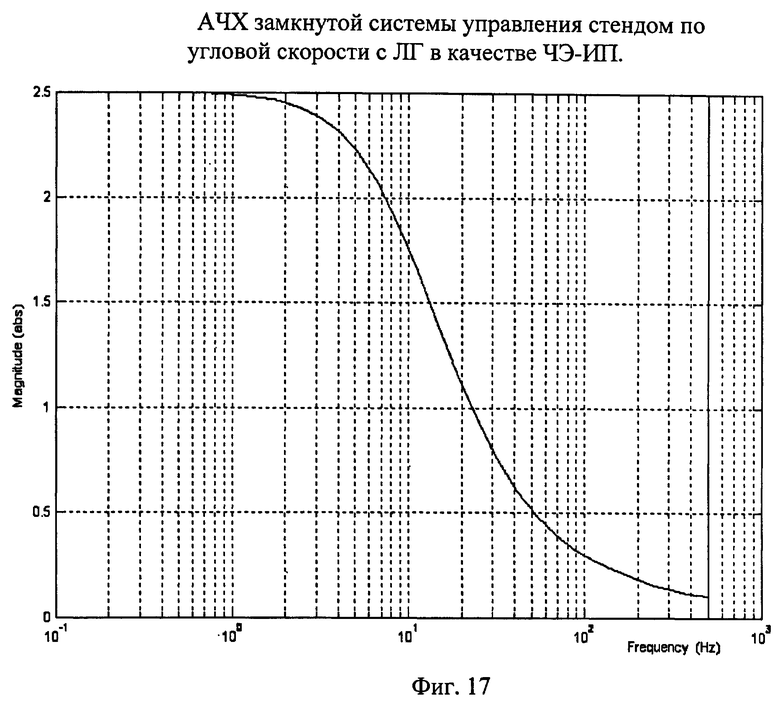
На фиг.12-14 показаны ЛАЧХ и ЛФЧХ разомкнутых систем управления стендом для трех типов гироскопов, а на фиг.15-17 - АЧХ замкнутых систем управления по угловой скорости. Результаты анализа частотных характеристик представлены в табл.2.
Из табл.2 видно, что при смене инерциального чувствительного элемента показатели качества остаются высокими и стабильными. Некоторые их отличия объясняются различными инерционными свойствами гироскопов (различными моментами инерции и коэффициентами скоростного демпфирования), но за счет подбора коэффициентов дискретного регулятора, приведенных в табл.1, указанные параметры практически не влияют на работоспособность стенда. Рассмотренные типы гироскопов имеют различные физические принципы работы, а полученные идентичные результаты динамических свойств стенда при смене инерциальных чувствительных элементов, находящихся в режиме самоконтроля, говорят о том, что в качестве инерциального чувствительного элемента предлагаемого стенда может быть использован любой прецизионный измеритель угловой скорости (ВТГ, ДНГ и др.). Нет принципиальных отличий в динамических характеристиках стенда в зависимости от типа обратной связи инерциального чувствительного элемента. Как следует из фиг.15, на которой приведены АЧХ замкнутой системы стенда при использовании в качестве инерциального ЧЭ ДУС с аналоговой и аналого-цифровой обратными связями, отличий в АЧХ при смене одного типа ДУС на другой практически нет.
Точностные характеристики стенда и диапазон измеряемых угловых скоростей определяются типом инерциального чувствительного элемента, а динамические характеристики и диапазон измеряемых угловых скоростей обеспечиваются подбором коэффициентов цифрового регулятора.
Литература.
1. Бессекерский В.А., Попов Е.П.Теория систем автоматического регулирования. - М.: Наука, 1975. - 767 с.
2. Бессекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 351 с.
3. Высокоточные преобразователи угловых перемещений / Под ред. А.А.Ахметжанова - М.: Энергоатомиздат, 1986.
4. Изерман Р.Цифровые системы управления: Пер. с англ. - М.: Мир, 1984.-541 с.
5. Калихман Д.М. Прецизионные управляемые стенды для динамических испытаний гироскопических приборов / Под ред. акад. В.Г.Пешехонова - СПб. ГНЦ РФ ЦНИИ «Электроприбор», 2008. - 304 с. ISBN 5-900780-82-5.
6. Калихман Д.М. Одноосное управляемое основание с датчиком угловой скорости в качестве чувствительного элемента, находящегося в режиме самоконтроля // Изв. вузов. Приборостроение. 2001. - №1, Т.44. - С.30-34.
7. Куо Б. Теория и проектирование цифровых систем управления. - М.: Машиностроение, 1986. - 448 с.
8. Патент №2044274, приоритет от 27.05.92. Стенд для контроля прецизионного гироскопического датчика угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин В.И. (Россия). Зарегистрир. в Гос. реестре изобр. 20.09.95. // БИ 1995.
9. Патент RU №2339912 C1 МПК G01C 25/00 (2006.01), приоритет от 13.02. 2007. Стенд для контроля измерителей угловой скорости / Калихман Д.М., Калихман Л.Я., Садомцев Ю.В., Полушкин А.В., Ермаков Р.В., Депутатова Е.А., Нахов С.Ф. // Опубликовано 27.11.2008, БИ №33.
10. Садомцев Ю.В. Конструирование систем управления с обратной связью по критериям точности и грубости. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2003. - 206 с.
11. Фабрикант Е.А., Журавлев Л.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984. - 248 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |

Изобретение относится к области приборостроения и может быть использовано в системах контроля прецизионных гироскопических датчиков угловой скорости. Технический результат - расширение функциональных возможностей. Для достижения данного результата использован принцип одноосного гироскопического стабилизатора с измерителем угловой скорости в качестве инерциального чувствительного элемента, работающего в режиме программного разворота. В систему управления стендом введены: блок преобразования напряжения питания, блок преобразования информации, содержащий аналого-цифровой преобразователь и программируемую логическую интегральную схему, шина блока преобразования информации, микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором. 1 з.п. ф-лы, 17 ил., 2 табл.
1. Универсальный стенд для контроля прецизионных гироскопических измерителей угловой скорости, содержащий корпус, траверсу, закрепленную на корпусе с возможностью вращения, двигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, устройство питания элементов, закрепленных на траверсе; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения траверсы, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости, управляющий процессор, содержащий в том числе порты ввода-вывода и ядро с дополнительной периферией, аналого-цифровой и цифроаналоговые преобразователи, которые могут быть как встроенными в процессор, так и внешними устройствами по отношению к процессору, усилитель мощности, вход которого соединен с выходом цифроаналогового преобразователя, соединенного своим входом с первым портом ввода-вывода управляющего процессора, а выход усилителя мощности соединен с входом системы управления двигателем постоянного тока, систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре, управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс со вторым портом ввода-вывода управляющего процессора, угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены с третьим портом ввода-вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда, отличающийся тем, что, с целью расширения функциональных возможностей стенда путем обеспечения самоконтроля масштабного коэффициента у инерциальных гироскопических измерителей угловой скорости различных типов, каждый из которых одновременно является чувствительным элементом стенда и испытуемым прибором, универсализации конструкции стенда и снижения моментов трения, действующих по оси вращения траверсы, обеспечивающего повышение точности воспроизведения угловых скоростей, в систему управления стендом введены закрепленные на вращающейся траверсе блок преобразования напряжения питания, блок преобразования информации, содержащий аналого-цифровой преобразователь и программируемую логическую интегральную схему, шина блока преобразования информации, микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором, при этом вход преобразователя напряжения питания посредством жгута, проходящего через центр полой траверсы, либо через вращающийся трансформатор соединен с выходом стационарного источника питания, а выходы преобразователя напряжения соединены с соответствующими входами блоков, закрепленных на траверсе; вход шины блока преобразования информации соединен с выходом измерительного датчика угловой скорости, первый выход шины блока преобразования информации соединен с входом программируемой логической интегральной схемы, а второй выход - с входом аналого-цифрового преобразователя блока преобразования информации; выходы программируемой логической интегральной схемы и аналого-цифрового преобразователя блока преобразования информации соединены соответственно с первым и вторым входами микроконтроллера, содержащего интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу; выход приемника инфракрасного или радиочастотного сигнала соединен с четвертым портом ввода-вывода управляющего процессора, при этом в управляющем процессоре алгоритмически реализован контур адаптации системы управления двигателем к изменению типа устанавливаемого инерциального чувствительного элемента (измерительного датчика угловой скорости) и момента инерции подвижной части стенда.
2. Устройство по п.1, отличающееся тем, что в качестве инерциального чувствительного элемента, одновременно являющегося испытываемым прибором, использован прецизионный гироскопический измеритель угловой скорости любого типа (электромеханический датчик угловой скорости с электрической обратной связью, лазерный, волоконно-оптический, волновой твердотельный, динамически настраиваемый).
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| RU 2075042 C1, 11.05.1993 | |||
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| КАЛИХМАН Д.М | |||
| Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов | |||
| - Саратов: Изд.-во Сарат | |||
| Гос | |||
| Техн | |||
| Университета, 2001 | |||
| - 336 с | |||
| US 3883812 А, 13.05.1975. | |||

