Изобретение относится к горному делу, в частности к струговым комплексам.
Цель изобретения -повышение эффективности управления струговой установкой и секциями крепи в плоскости пласта за счет снижения трудоемкости вспомогательных работ.
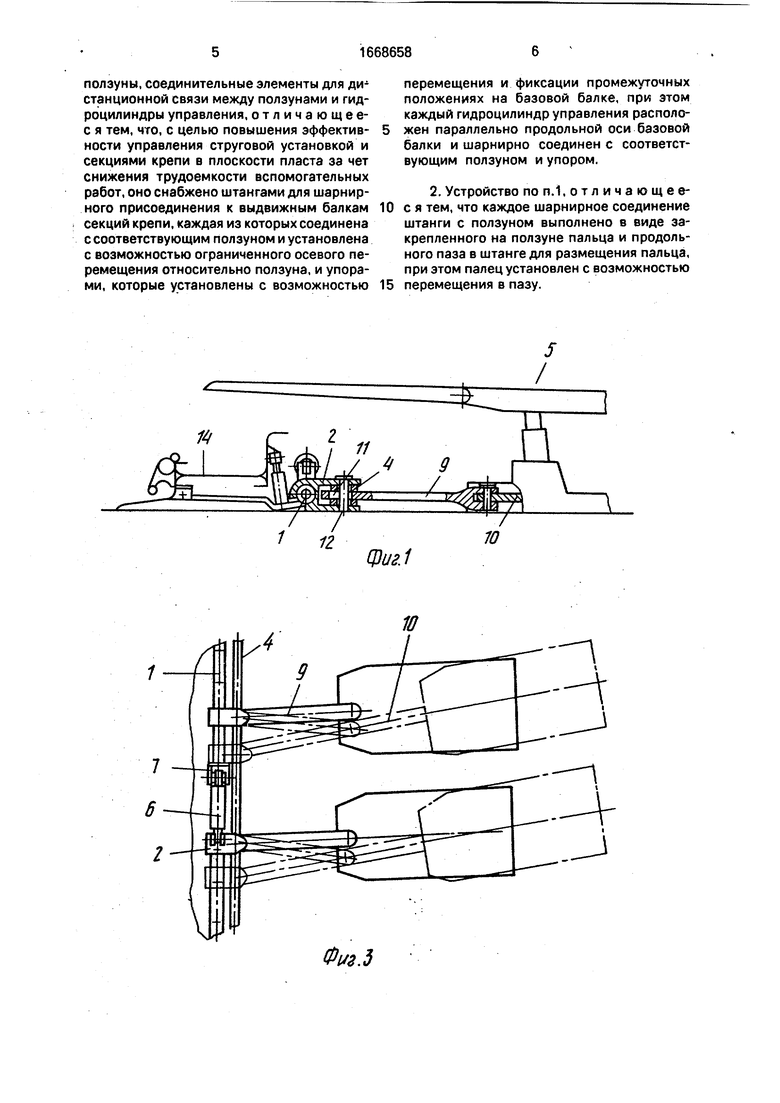
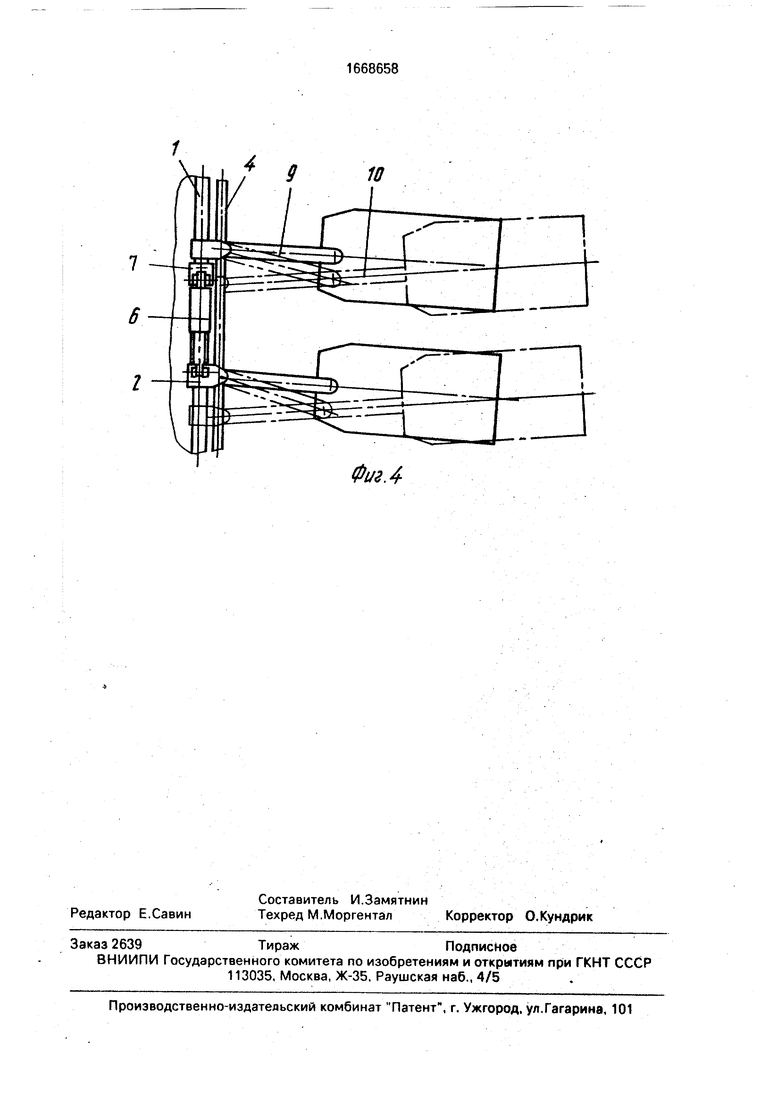
На фиг.1 показано устройство для соединения секций крепи со струговой установкой в лаве, поперечное сечение; на фиг.2 - то же, вид в плане; на фиг.З - порядок перемещения точки присоединения секций крепи по длине лавы и изменение положения секций крепи в плоскости пласта после окончания цикла передвижки; на фиг.4 - смещение точки присоединения и положение секций крепи при последующем цикле передвижки.
Устройство для соединения секций крепи со струговой установкой состоит из базовой балки 1, ползунов 2, которые установлены на базовой балке 1 с возможностью перемещения и фиксации стопором 3, элементов 4 дистанционной связи, соединяющих ползуны 2, с шагом, равным шагу расстановки секций 5 крепи по лаве, гидроцилиндров 6 управления, расположенных вдоль базовой балки параллельно ее продольной оси и соединенных одним концом с ползуном 2, а другим с упором 7, установленным с возможностью перемещения и фиксации на базовой балке 1 стопором 8 возможности ограниченного осевого перемещения (с определенным шагом), штанг 9, установленных шарнирно между ползунами 2 и выдвижными балками 10 секций 5 крепи с возможностью поворота в плоскости пласта. Штанги 9 снабженьГпродольными пазами 11 для обеспечения их разворота. Шарнирное соединение штанги 9 с ползуном 2 выполнено в виде закрепленного на ползуне 2 пальца 12 и паза 11. Палец 12 установлен с возможностью перемещения в пазу 11.
Базовая балка 1 может быть выполнена в виде шарнирно соединенных между собой по длине линейных секций 13, закрепленных на конвейере 14.
Ползуны 2 могут быть выполнены в виде кронштейнов, охватывающих базовую балку 1 или размещенных внутри базовой балки 1.
Элементы 4 дистанционной связи могут быть выполнены жесткими в виде штанг или в виде гибких отрезков цепи.
Работа устройства заключается в следующем.
При смещении (сползании) базовой балки 1 и секций 5 крепи в ту или другую сторону после снятия очередной полоски угля
ползун 2 (фиг.З) перемещают по базовой балке 1 в сторону, противоположную этому смещению, с помощью гидроцилиндра 6, после чего гидроцилиндр 6 устанавливают
на гидрозамок, фиксируя положение ползуна 2 на балке 1. При этом штанга 9 получает угловое смещение в плоскости пласта относительно выдвижной балки 10. Благодаря наличию дистанционных элементов 4 такое
0 же угловое смещение получают и штанги 9 смежных секций 5, на которых установлены гидроцилиндры 6. Наворот штанг 9 может быть осуществлен одновременно по всей длине лавы или на отдельных ее участках. В
5 последнем случае, когда между смежными участками отсутствуют дистанционные элементы 4, включение гидроцилиндров 6 осуществляют только на заданных участках. При подтягивании к базовой балке 1
0 секции 5 крепи разворачиваются в плоскости пласта по ходу движения, следуя за смещен- ными точками подсоединения штанг 9 (фиг.З). По окончании передвижки секции 5 крепи занимают в плоскости пласта новое
5 положение. При необходимости производят дополнительно одно или несколько перемещений ползуна 2 с последующей выемкой полоски угла и подтягиванием секций 5 крепи.
0 Перемещение ползуна 2, а следовательно, и точки присоединения секций крепи к базовой балке 1, ограничено величиной хода штока гидроцилиндра 6.
Для обеспечения дополнительных пере5 мещений точки присоединения секций 5 крепи к базовой балке 1 фиксируют стопором 3 ползун 2 на балке 1, снимают стопор 8 и перемещают упор 7 с помощью гидроцилиндра 6. После выполнения этой операции
0 устанавливают стопор 8, снимают стопор 3 и перемещают ползун 2 на требуемую величину.
Штанги 9, развернутые в плоскости пла- ста,например, в направлении вверх по ходу
5 движения при наклонном залегании пласта, под действием усилия прижатия во время строгания забоя перемещают базовую балку 1 на забой и вверх по падению пласта. При выборе оптимального наворота штанг 9
0 обеспечивается удержание струговой установки и секций 5 крепи от сползания по падению пласта и перемещение их в направлении простирания пласта. Формула изобретения
5 1. Устройство для соединения секций крепи со струговой установкой, включающее базовую балку для присоединения к струговой установке, на которой с возможностью перемещения и фиксации в промежуточных положениях установлены
ползуны, соединительные элементы для дистанционной связи между ползунами и гидроцилиндры управления, отличающее- с я тем, что, с целью повышения эффективности управления струговой установкой и секциями крепи в плоскости пласта за чет снижения трудоемкости вспомогательных работ, оно снабжено штангами для шарнирного присоединения к выдвижным балкам секций крепи, каждая из которых соединена с соответствующим ползуном и установлена с возможностью ограниченного осевого перемещения относительно ползуна, и упорами, которые установлены с возможностью
0
5
перемещения и фиксации промежуточных положениях на базовой балке, при этом каждый гидроцилиндр управления расположен параллельно продольной оси базовой балки и шарнирно соединен с соответствующим ползуном и упором.
2. Устройство поп.1.отличающее- с я тем, что каждое шарнирное соединение штанги с ползуном выполнено в виде закрепленного на ползуне пальца и продольного паза в штанге для размещения пальца, при этом палец установлен с возможностью перемещения в пазу.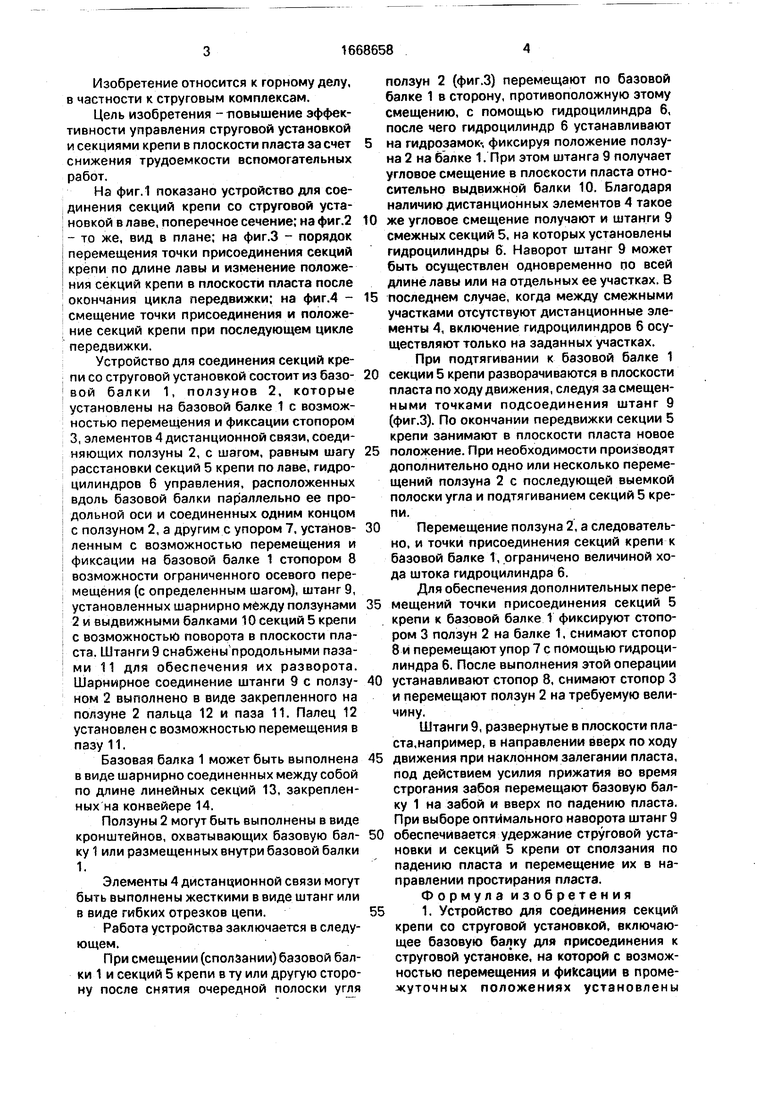
Изобретение относится к горному делу, а именно к струговым комплексам. Цель изобретения - повышение эффективности управления струговой установкой и секциями крепи в плоскости пласта за счет снижения трудоемкости вспомогательных работ. Устройство включает базовую балку (ББ) 1 для присоединения к струговой установке, соединительные элементы 4 для дистанционной связи между ползунами 2, гидроцилиндры (ГЦ) 6 управления, штанги 9 для шарнирного присоединения к выдвижным балкам 10 секций 5 крепи и упоры 7. На ББ 1 с возможностью перемещения и фиксации в промежуточных положениях установлены ползуны 2. Каждая штанга 9 шарнирно соединена с ползуном 2 и установлена с ограниченным перемещением относительно ползуна 2. Каждый упор 7 установлен с возможностью перемещения и фиксации в промежуточных положениях на ББ 1. Каждый ГЦ 6 расположен параллельно продольной оси ББ 1 и шарнирно соединен с ползуном 2 и упором 7. Каждое соединение штанги 9 с ползуном 2 выполнено в виде пальца и продольного паза в штанге 9. Палец установлен с возможностью перемещения в пазу. Во время работы при смещении ББ 1 и секций 5 крепи ползуны 2 перемещают в противоположную смещению сторону ГЦ 6 и затем ставят ГЦ 6 на замок. При этом штанга 9, а также благодаря элементам 4 и штанги 9 смежных секций 5 крепи получают угловое смещение. При подтягивании секций 5 крепи и ББ 1 последние разворачиваются в плоскости пласта по ходу движения и занимают требуемое положение. При необходимости производят несколько перемещений ползуна 2. 1 з.п. ф-лы, 4 ил.
Физ.5
10
фиг.1
Фиг.4
| Коммутатор | 1984 |
|
SU1229949A2 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
