Изобретение относится к горному делу, а именно к механизации горных работ в забоях угольных шахт, и служит для соединения секции механизированной крепи с конвейером струговой установки.
Известно устройство соединения секции механизированной крепи с конвейером, включающее кронштейн с роликом, неподвижно закрепленным на ставе конвейера, гибкую связь, охватывающую ролик и соединенную со штоками гидроцилиндров перемещения секций, между которыми расположена направляющая балка. Механизм направленности перемещения выполнен в виде каретки, соединяющей основания, а гидроцилиндры передвижения смонтированы на каждом основании. Однако при таком
выполнении устройства из-за отсутствия фиксации положения конвейера относительно крепи происходит смещение кронштейна с роликом вдоль лавы, что приводит к изменению положения оси ролика относительно продольной оси симметрии расположения гидроцилиндров передвижки крепи, вызывающего появление изгибающей нагрузки на штоки и выходу их из строя. К тому же охват гибкой нитью ролика затрудняет управление конвейером в вертикальной плоскости.
Известно также устройство соединения секции механизированной крепи с конвейером, включающее кронштейн, жестко закрепленный на ставе .конвейера, направляющую, имеющую выпуклую в стоVI
сь ел
ю
рону забоя поверхность, закрепленную на кронштейне и соединенную посредством гибкой связи со штоками гидроцилиндров перемещения секций, между которыми расположена балка: кронштейн имеет переднюю стенку с завальной стороны с центральным отверстием, в котором закреплена направляющая балка, и симметрично расположенными относительно него боковыми отверстиями, через которые пропущена гиб- кая связь. Такое выполнение устройства соединения секций механизированной крепи с конвейером исключает возможность смещения конвейера вдоль лавы при проходе струга, а также устраняет дыхание конвейера, что может привести струговый комплекс в неработоспособное состояние из-за наложения обратных связей при управлении крепью или струговой установкой. В данном случае нельзя произвести подтягивание или опу- екание конвейера без раскрепления лавы, невозможно также выполнить эти же операции с крепью, так как их проведению будет препятствовать конвейер струговой установки. Отсутствие дыхания конвейера обуславливает возможность блокировки рабочего органа в забое и аварию со струговой установкой.
Цель изобретения - повышение эксплуатационных возможностей за счет незави- симого управления струговой установкой и крепью.
Для этого устройство соединения секции механизированной крепи с направляющей конвейера, включающее кронштейн, шарнирно закрепленный на направляющей конвейера, и кронштейн, шарнирно закрепленный на штанге гидроцилиндра передвижки крепи, соединены друг с другом гибкой связью; кронштейны имеют карма- ны, в которых размещается в сложенном .состоянии гибкая связь при перемещении конвейера на забой. Такое выполнение устройства соединения секции механизированной крепи с направляющей конвейера, когда гибкая связь соединяет между собой два кронштейна, шарнирно закрепленных на направляющей конвейера и штанге гидроцилиндра передвижки крепи, позволяет при подтягивании к конвейеру секции пол- учить необходимый 3a30pt достаточный для отжима конвейера струговой установки на ширину корпуса струга при использовании в качестве добычной машины струговой установки отрывного действия или на величи- ну вылета резцов при применении струговых установок скользящего действия и комбинированного. Соединение гибкой связью кронштейна секции крепи и направляющей конвейера позволяет производить
независимое управление как струговой установкой, так и механизированной крепью. При этом обеспечивается возможность подъема и опускания струговой установки без каких-либо манипуляций с крепью, выравнивание положений секций крепи, подъем крепи, ее опускание. Для управления струговой установкой по почве пласта на одном кронштейне предусмотрены пазы, а на другом - переставной упор, взаимодействующий с пазом, и в зависимости от их высоты взаимодействия изменять место приложения нагрузки гидроцилиндра при передвижке конвейера. В связи с этим завальная сторона конвейера может опускаться или подниматься, чем обеспечивается управление стругом в вертикальной плоскости, аналогичное используемому во всех эксплуатирующихся струговых комплексах.
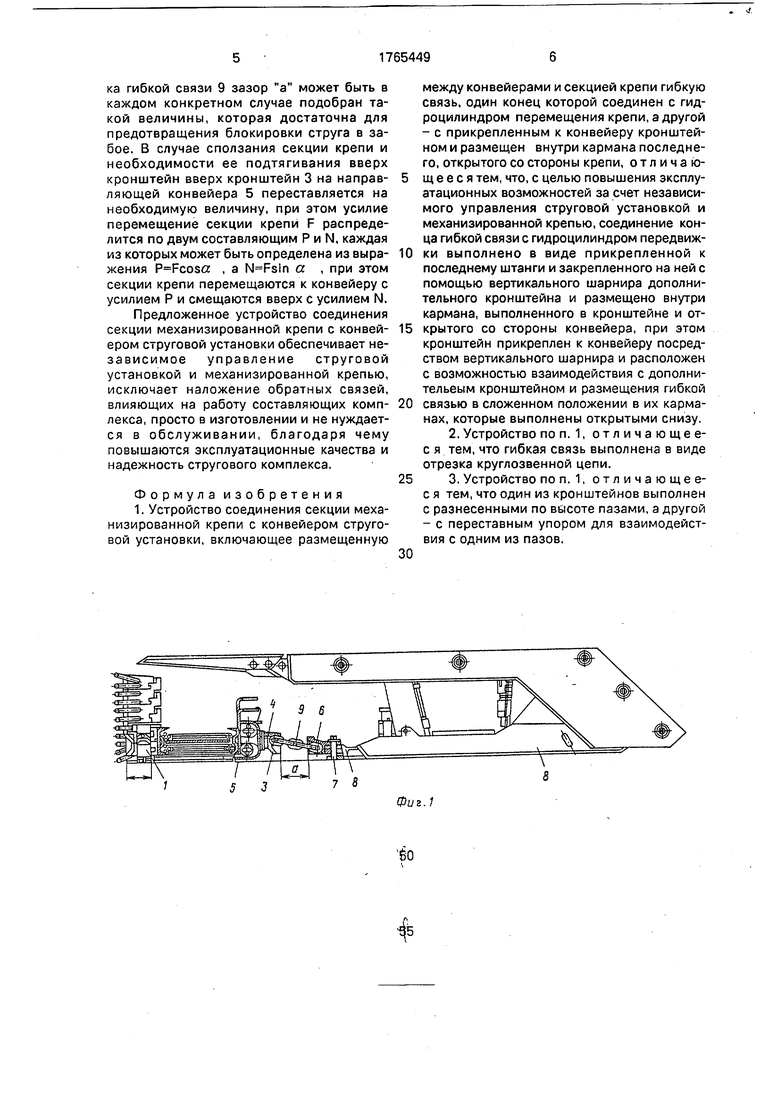
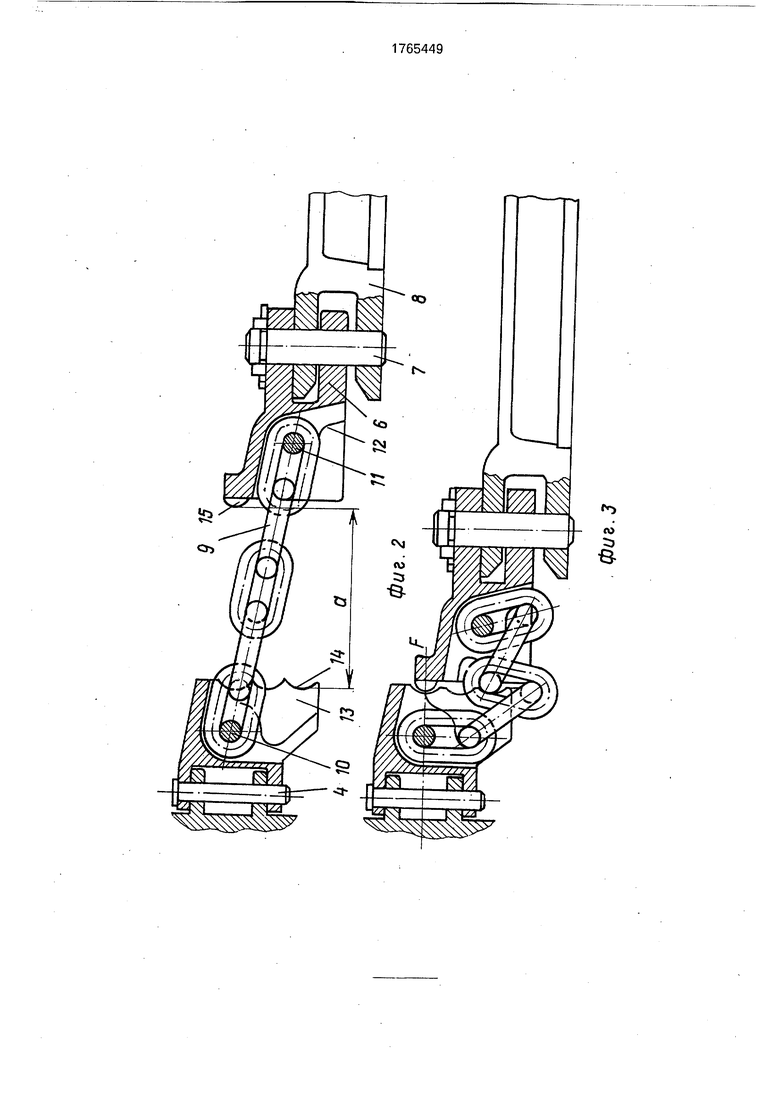
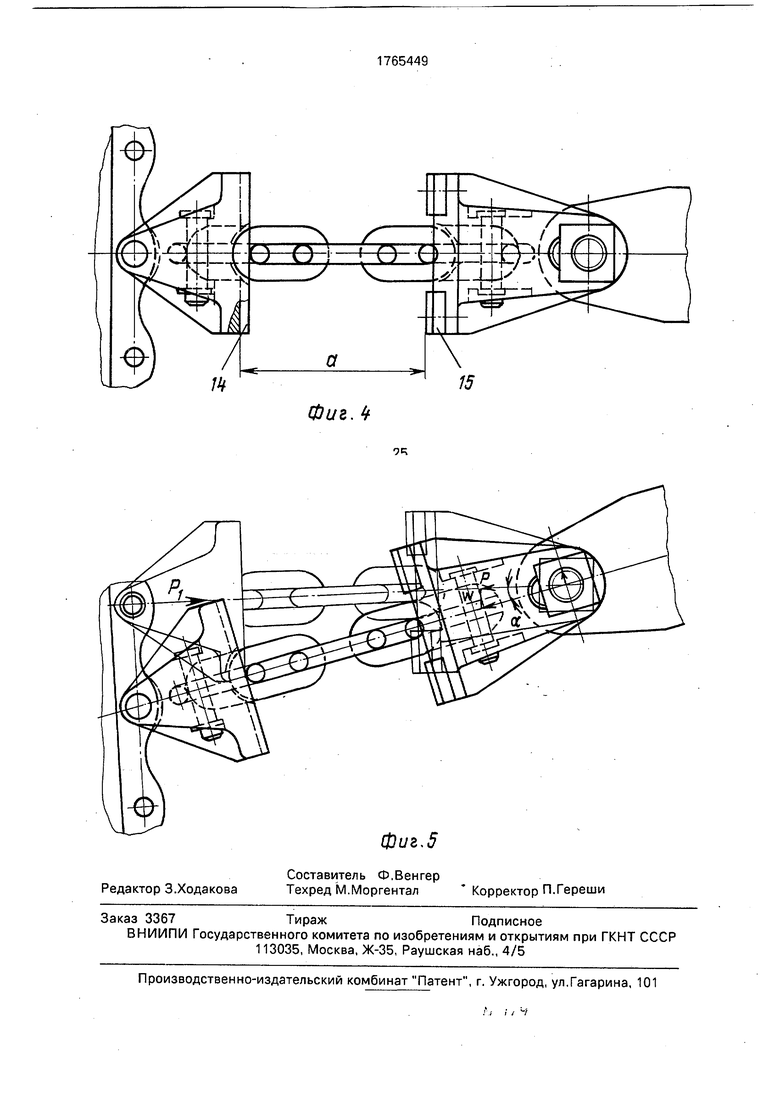
На фиг. 1 изображен комплекс с устройством соединения механизированной крепи с конвейером, общий вид; на фиг. 2 - то же, при подтягивании крепи; на фиг.З-то же, при передвижке конвейера; на фиг. 4 - устройство, вид сверху; на фиг. 5 - то же, при подтягивании секции крепи вверх, план.
Устройство соединения секции механизированной крепи с конвейером струговой установки включает струговую установку 1, секцию механизированной крепи 2, кронштейн 3, соединенный шарниром 4 с направ- ляющей конвейера 5, кронштейн 6, соединенный шарниром 7 с тягой 8 гидроцилиндра передвижки крепи 2, гибкой связи 9, например отрезка цепи, шарнирно закрепленной осями 10 и 11 в кронштейнах 3 и 6. Для исключения передачи усилия перемещения конвейера струговой установки через гибкую связь в кронштейнах 3 и 6 предусмотрены карманы 12 и 13, в которых размещается гибкая связь в сложенном состоянии. Для изменения места приложения усилия F гидроцилиндра крепи к конвейеру струговой установки кронштейн 3 снабжен впадинами 14, с которыми, в зависимости от необходимости, взаимодействует переставной упор 15, закрепленный на кронштейне 6. При перемещении конвейера на забой упор 15 кронштейна б взаимодействует с одной из впадин 14 кронштейна 3, обеспечивая передачу усилия с гидроцилиндра на рештак конвейера. При подтягивании секции крепи к конвейеру усилие F, развиваемое гидроцилиндром крепи, сначала растягивает гибкую связь 9, создавая зазор а, необходимый для отодвигания конвейера от забоя при проходе корпуса струга меж- ДУ грудью забоя и забойной стороной конвейера, а затем происходит подтягивание крепи к конвейеру. За счет длины отрезка гибкой связи 9 зазор а может быть в каждом конкретном случае подобран такой величины, которая достаточна для предотвращения блокировки струга в забое. В случае сползания секции крепи и необходимости ее подтягивания вверх кронштейн вверх кронштейн 3 на направ- ляющей конвейера 5 переставляется на необходимую величину, при этом усилие перемещение секции крепи F распределится по двум составляющим Р и N, каждая из которых может быть определена из выра- жения P Fcosa , a a , при этом секции крепи перемещаются к конвейеру с усилием Р и смещаются вверх с усилием N. Предложенное устройство соединения секции механизированной крепи с конвей- ером струговой установки обеспечивает независимое управление струговой установкой и механизированной крепью, исключает наложение обратных связей, влияющих на работу составляющих комп- лекса, просто в изготовлении и не нуждается в обслуживании, благодаря чему повышаются эксплуатационные качества и надежность стругового комплекса.
Формула изобретения 1. Устройство соединения секции механизированной крепи с конвейером струговой установки, включающее размещенную
510 15 20
25
0
между конвейерами и секцией крепи гибкую связь, один конец которой соединен с гидроцилиндром перемещения крепи, а другой - с прикрепленным к конвейеру кронштейном и размещен внутри кармана последнего, открытого со стороны крепи, отличающееся тем, что, с целью повышения эксплуатационных возможностей за счет независимого управления струговой установкой и механизированной крепью, соединение конца гибкой связи с гидроцилиндром передвижки выполнено в виде прикрепленной к последнему штанги и закрепленного на ней с помощью вертикального шарнира дополнительного кронштейна и размещено внутри кармана, выполненного в кронштейне и открытого со стороны конвейера, при этом кронштейн прикреплен к конвейеру посредством вертикального шарнира и расположен с возможностью взаимодействия с дополни- тельеым кронштейном и размещения гибкой связью в сложенном положении в их карманах, которые выполнены открытыми снизу.
2.Устройство по п. 1, отличающее- с я тем, что гибкая связь выполнена в виде отрезка круглозвенной цепи.
3.Устройство по п. 1, отличающее- с я тем, что один из кронштейнов выполнен с разнесенными по высоте пазами, а другой - с переставным упором для взаимодействия с одним из пазов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ СЕКЦИЙ КРЕПИ СО СТРУГОВОЙ УСТАНОВКОЙ | 1992 |
|
RU2043496C1 |
| СТРУГОВЫЙ КОМПЛЕКС | 1992 |
|
RU2067178C1 |
| Струговый агрегат | 1987 |
|
SU1559138A1 |
| Механизированная крепь | 1984 |
|
SU1162992A1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| Установка для выемки угля | 1980 |
|
SU891909A1 |
| Устройство для передвижки конвейера | 1971 |
|
SU470445A1 |
| Струговая установка | 1980 |
|
SU1141191A1 |
| Устройство для соединения механизированной крепи с конвейером | 1983 |
|
SU1150374A1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ ДЛЯ ФРОНТАЛЬНЫХ И СТРУГОВЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ И АГРЕГАТОВ И МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021524C1 |
Использование: механизация горных работ в очистных забоях угольных шахт. Сущность изобретения: устройство включает гибкую связь, один конец которой соединен с гидроцилиндром перемещения, а другой - с кронштейном конвейера, и размещен в кармане последнего. Первое из указанных соединений выполнено в виде штанги и дополнительного кронштейна, Штанга прикреплена к гидроцилиндру передвижки, а дополнительный кронштейн закреплен на ней с помощью вертикального шарнира. Соединение гибкой связи с гидроцилиндром перемещения размещено внутри кармана.Карман выполнен в кронштейне и открыт со стороны конвейера. Кронштейн прикреплен к конвейеру вертикальным шарниром. Гибкая связь в сложенном положении размещается в карманах обоих кронштейнов.. Карманы снизу открыты. Гибкая связь может быть выполнена в виде отрезка круглозвенной цепи. Один из кронштейнов может иметь размещенные по высоте пазы, а другой - переставной упор для взаимодействия с одним из пазов. 2 з.п. ф-лы, 5 ил. (Л
7 8
fr
ft
D
в
Фиг. b
15
Фиг,5
| Механизированная крепь для наклонных и крутых пластов | 1983 |
|
SU1121453A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство соединения секций механизированной крепи с конвейером | 1981 |
|
SU1025896A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
