1Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЯВЛЕНИЯ В РАБОЧЕЙ ЗОНЕ КРАНА ЧЕЛОВЕКА | 2004 |
|
RU2266859C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО АВТОСТОПА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО ИЛИ ПУТЕВОГО СРЕДСТВА | 2010 |
|
RU2448005C1 |
| РЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2004 |
|
RU2335423C2 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| БЛОК ПНЕВМАТИЧЕСКОЙ СХЕМЫ ШУНТИРОВАНИЯ ВЕНТИЛЯ ТОРМОЗА БЕЗОПАСНОСТИ | 2022 |
|
RU2794305C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| МОДУЛЬНАЯ ПОДСТАВКА ДЛЯ НОГ ДЛЯ КАБИНЫ МАШИНИСТА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2759562C1 |
Изобретение относится к устройствам для ориентации и точной остановки транспортных средств, а именно подъемно-транспортных средств. Цель изобретения - повышение точности. Устройство имеет установленный на пути датчик, а на подъемно-транспортном средстве - чувствительные элементы, которые размещены по окружности, а один из чувствительных элементов установлен в центре окружности. 3 ил.
Изобретение относится к устройствам для ориентации и точной остановки транспортных средств, а именно подъемно-транспортных средств.
Цель изобретения - повышение точности.
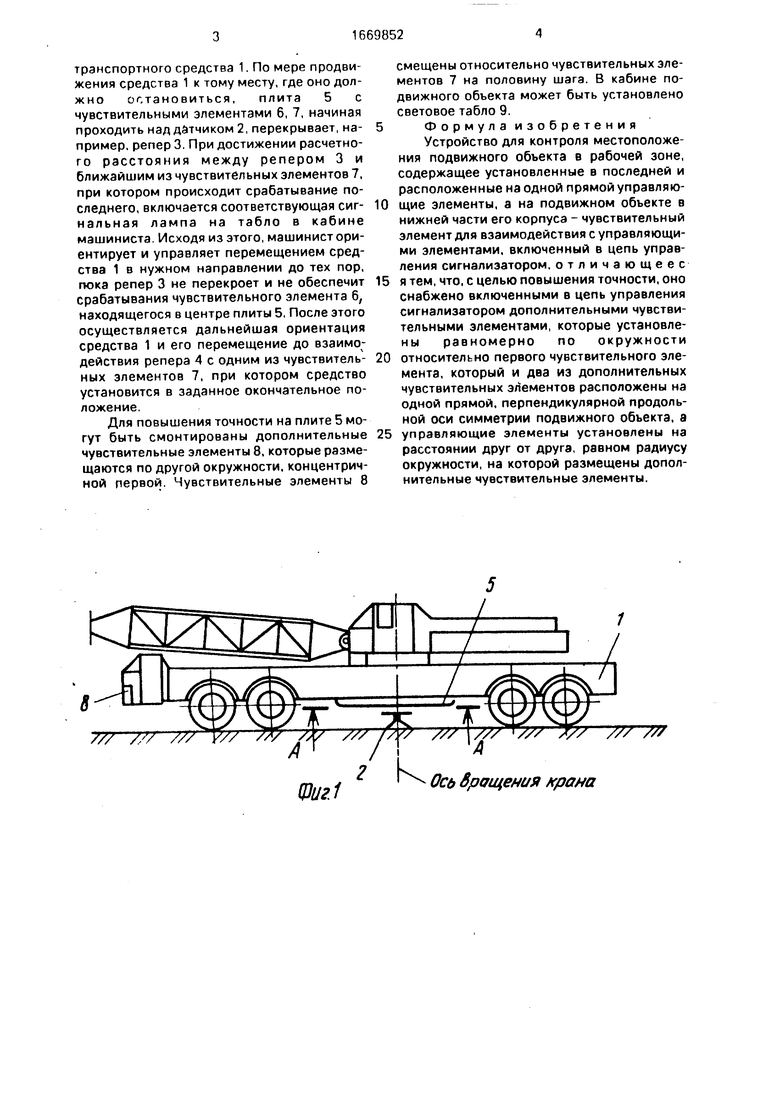
На фиг.1 показано устройство, общий вид; на Лиг.2 - плита с установленными на ней чувствительными элементами; на фиг.З - то же, рабочее положение при наезде на реперы датчика.
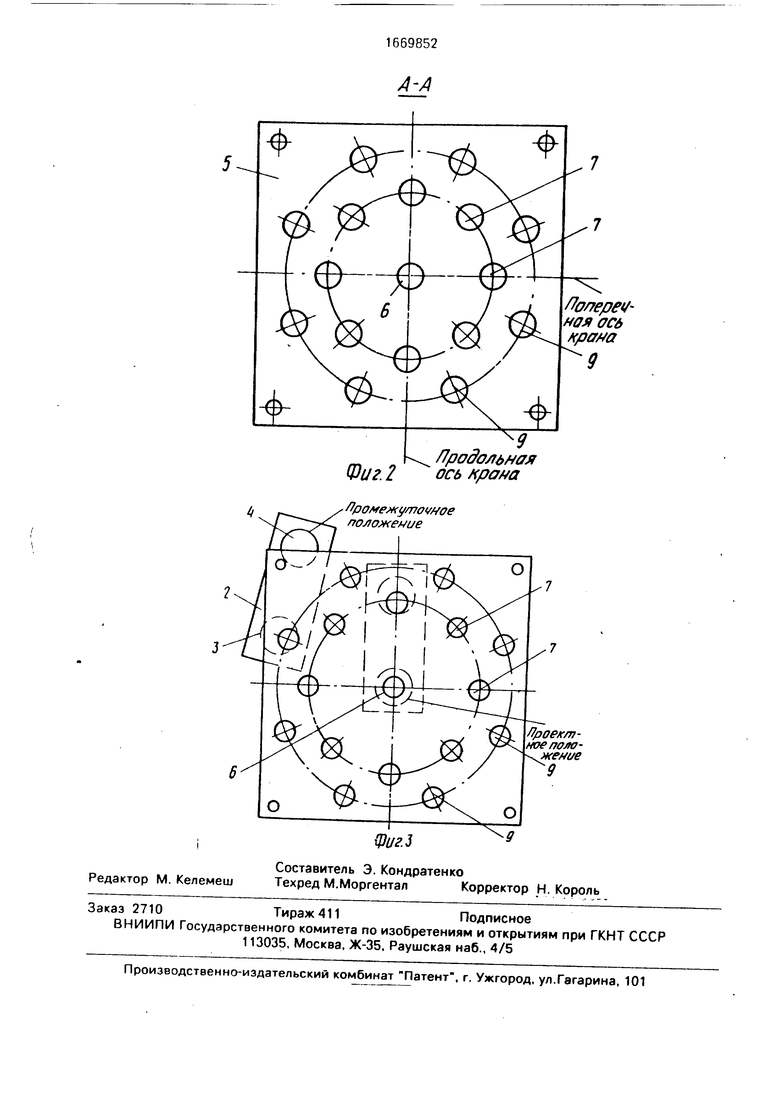
Устройство содержит установленный на пути движения в месте остановки подъемно- транспортного средства 1 датчик 2, который имеет металлические реперы 3 и 4. На подъемно-транспортном средстве 1 в его нижней части закреплена плита 5, которая устанавливается в заданном месге в пределах гео- метрического контура подъемно- транспортного средства 1, например своим геометрическим центром на оси вращения средства 1. На плите 5 установлены с возможностью взаимодействия с реперами 3 и 4 чувствительные элементы 6, 7. Чувствительный элемент 6 расположен в геометрическом центре плиты 5, а остальные чувствительные элементы 7 равномерно размещены на ней по окружности, центр которой совпадает с геометрическим центром плиты, а два чувствительных элемента 7 лежат на одной прямой а-а, проходящей через центр окружности и параллельной поперечной оси подъемно-транспортного средства 1. В кабине имеется световое табло, связанное с чувствительными элементами 6 и 7.
Устройство работает следующим образом.
Предварительно машинистом определяется направление движения подъемноО
( чэ
00
ел
N)
транспортного средства 1. По мере продвижения средства 1 к тому месту, где оно дол- жно остановиться, плита 5 с чувствительными элементами 6, 7, начиная проходить над датчиком 2, перекрывает, на- пример, репер 3. При достижении расчетного расстояния между репером 3 и ближайшим из чувствительных элементов 7, при котором происходит срабатывание последнего, включается соответствующая сиг- нальная лампа на табло в кабине машиниста. Исходя из этого, машинист ориентирует и управляет перемещением средства 1 в нужном направлении до тех пор, пока репер 3 не перекроет и не обеспечит срабатывания чувствительного элемента 6, находящегося в центре плиты 5, После этого осуществляется дальнейшая ориентация средства 1 и его перемещение до взаимодействия репера 4 с одним из чувствитель- ных элементов 7, при котором средство установится в заданное окончательное положение.
Для повышения точности на плите 5 могут быть смонтированы дополнительные чувствительные элементы 8, которые размещаются по другой окружности, концентричной первой. Чувствительные элементы 8
7/7 /, У /Л
Щи2.1
смещены относительно чувствительных элементов 7 на половину шага. В кабине подвижного объекта может быть установлено световое табло 9.
Формула изобретения Устройство для контроля местоположения подвижного объекта в рабочей зоне, содержащее установленные в последней и расположенные на одной прямой управляющие элементы, а на подвижном объекте в нижней части его корпуса - чувствительный элемент для взаимодействия с управляющими элементами, включенный в цепь управления сигнализатором, отличающеес я тем, что, с целью повышения точности, оно снабжено включенными в цепь управления сигнализатором дополнительными чувствительными элементами, которые установлены равномерно по окружности относительно первого чувствительного элемента, который и два из дополнительных чувствительных элементов расположены на одной прямой, перпендикулярной продольной оси симметрии подвижного объекта, а управляющие элементы установлены на расстоянии друг от друга, равном радиусу окружности, на которой размещены дополнительные чувствительные элементы.
/// 7//
2 К
Ось вращения крана
ная ось краха
9
ч
Лродольная Фиг. 2 ось крана
Лромежу/лоуное положение
Лроек/л- ное положение
9
фугЗ
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ КОКСОВЫХ МАШИН ОТНОСИТЕЛЬНО оси МЕСТА ОСТАНОВКИ | 0 |
|
SU368637A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
