Изобретение относится к способу и устройству обеспечения безопасности на транспорте метрополитена, и может быть использовано для определения и идентификации объектов находящихся на путях следования транспорта метрополитена, создающих аварийную ситуацию, путём передачи информации, в режиме онлайн, с борта летящего впереди поезда беспилотным летательным аппаратом (БПЛА), машинисту поезда и оператору центра дистанционного контроля и управления, о наличии препятствий и аварийных ситуаций в зоне контроля БПЛА.
Заявляемое техническое решение, относится к способам и устройствам безопасности при движении поезда метрополитена, заключающийся в онлайн мониторинге железнодорожной сети и принятие мер для предотвращения аварийных ситуаций, при поступлении информации с борта летящего впереди поезда БПЛА, а устройство БПЛА для осуществления способа позволяет обеспечить безопасность эксплуатации, при движении поездов метрополитена, в результате онлайн реакции на возникающие аварийные режимы. Причем, по заявленному техническому решению, непрерывный мониторинг состояния железнодорожного пути метрополитена, проводится с выводом информации в кабину машинисту, оператору центра дистанционного контроля и управления и в вычислительный комплекс (ВК) с искусственным интеллектом (ИИ). Это позволяет принять своевременные меры по предотвращению аварийных ситуаций.
По результатам патентного поиска из доступных авторами источников, в РФ и за рубежом, аналогов по заявляемому способу и устройству не выявлено.
Задача изобретения. С целью достоверности контроля и эффективности принимаемых решений, для безопасности всех движущихся средств и своевременное реагирование на аварийные ситуации, в зоне необходимого в онлайн контроля железнодорожного пути метрополитена проводить непрерывный мониторинг состояния железнодорожного пути, с выводом информации в кабину машинисту, оператору центра дистанционного контроля и управления и в вычислительный комплекс (ВК) с искусственным интеллектом (ИИ).
Решение поставленной задачи. Непрерывный мониторинг состояния железнодорожного пути метрополитена с выводом информации в кабину машинисту, оператору центра дистанционного контроля и управления и в вычислительный комплекс (ВК) с искусственным интеллектом (ИИ). производится с борта беспилотного летательного аппарата (БПЛА) вертикального взлёта и посадки, летящего впереди, по маршруту движения поезда метрополитена. Из общедоступных источников известно: Электропоезд может достигнуть максимального значения скорости только на прямых и протяженных участках, где отсутствуют повороты, и нет каких-либо препятствий. Как правило, речь идет о 90 км/ч среди поездов российских метрополитенов. Как утверждают специалисты, вагоны поезда могут выдержать нагрузку до 110 км/ч, рельсы - до 120 км/ч, а локомотив поезда - до 160 км/ч. Самые быстрый поезд в метро в мире, например, Шанхайский метрополитен известен на весь мир своими самыми скоростными поездами в метро, так конструкция двигателей и обтекаемость вагонов позволяет китайским поездам в метро разгоняться до 480 км/ч. На практике разгоняется он до 310 км/ч из экономических соображений.
Принимая во внимание «Правила технической эксплуатации метрополитена (ПТЭ)» (интернет. Ссылка: http://www.xjob.ru/ПТЭ_метро. Подвижный состав. Глава11. Общие требования. Табл.2. и табл3.) Учитываем данные табл.2 и табл.3.
Таблица 2
Расчетные тормозные пути при АРС для вагонов 81-717, 81-714 (в метрах)
Примечание: В таблице приведены длины тормозных путей (в метрах) как для порожнего, так и для груженого режимов при торможении восьмивагонного состава с момента превышения заданной скорости до полной остановки.
Таблица 3
ДЛИНА РАСЧЕТНОГО ТОРМОЗНОГО ПУТИ ПРИ ЭКСТРЕННОМ ТОРМОЖЕНИИ (В МЕТРАХ)
Можем принять дистанцию, между локомотивом поезда и БПЛА, по условию безопасного торможения состава, например, тройной путь торможения состава, при возникновении аварийной ситуации по пути следования учитывая данные табл. 2, принимаем, например, на скорости 90 км/ч (максимальную величину) 388м x3=1164м. Этот путь поезд проходит за время 90км/ч:60мин=1.5км/мин. или 1,164км: 1,5км/мин. =0,77мин или 45сек. 45сек - это время для реагирования на наличие аварийной ситуации, системой с БПЛА, для поезда, двигающегося со скоростью 90км/ч. с учётом запаса тройного пути торможения. Тормозной путь экстренного торможения составит согласно табл.3. 295м. при скорости 90км/ч. То есть - это позволяет использовать режим рекомендованного торможения, не используя режим экстремального торможения, при использование БПЛА, при наличии экстренной ситуации и наличии препятствия на пути следования поезда метрополитена. При этом время принятия решения составит 45 секунд, что вполне достаточно для реагирования и принятия решения машинистом поезда, оператором дистанционного управления и вычислительным комплексом (ВК) с искусственным интеллектом (ИИ).
Управление беспилотным БПЛА осуществляется по беспроводной линии связи, вычислительным комплексом (ВК) с искусственным интеллектом (ИИ) и при необходимости, в ручном режиме.
Рассмотрим аварийные режимы влияющие на безопасность движения и эксплуатации в метрополитене. Основываясь на классификацию нарушений правил безопасности движения и эксплуатации в Московском метрополитене, рассматриваем классификацию, с обоснованием предотвращения режимов нарушений правил безопасности движения и эксплуатации на метрополитене, при использовании способа и устройства БПЛА по заявленному техническому решению. Рассматриваем только те нарушения, которые возможно предотвратить или заранее среагировать по предложенному способу, благодаря БПЛА - сопровождения поезда.
Согласно: Приложение № 1 к приказу от 12 января 2015 г. № 10/Н https://wiki.nashtransport.ru/wiki/Классификация нарушений правил безопасности движения и эксплуатации в Московском метрополитене. Нарушения правил безопасности движения и эксплуатации в поездной и маневровой работе на метрополитене классифицируются как: 1. Крушение поездов. 2. Авария. 3. Событие. 4.Повреждение.
1). К крушениям поездов относятся: столкновения поездов с другими поездами или подвижным составом, сходы подвижного состава в поездах на главных путях перегонов и станций в результате которых: — погибли или ранены люди.
2) К авариям относятся: 1. Столкновения поездов с другими поездами или подвижным составом, сходы подвижного состава в поездах на главных путях перегонов и станций, не имеющих последствий, относящихся к крушению поездов. 2. Столкновения и сходы подвижного состава при маневровых и других передвижениях, в результате которых: — погибли или ранены люди; — или разбит подвижной состав до степени исключения из инвентарного парка; — затопление, пожар, неисправность сооружений и устройств, вызванных несоблюдением правил безопасности движения и эксплуатации.
3). К событиям относятся: 1. Столкновения и сходы подвижного состава при манёврах или других передвижениях, не имеющих последствий, относящихся к аварии. 2. Приём и отправление поезда (состава) по неготовому маршруту.3. Перевод стрелки под поездом (составом). 4. Несанкционированный проезд запрещающего сигнала. 5. Несанкционированное осаживание подвижного состава. 6. Саморасцеп поезда (состава). 7. Не ограждение сигналами остановки места препятствия для движения поездов или места производства работ, несанкционированная или неправильная (в нарушение нормативных документов) установка переносных сигналов остановки. 8. Ложная подача разрешающего сигнала светофора, указателя АЛС или монитора поездного компьютера вместо запрещающего или подача более разрешающего сигнала.9. Самопроизвольный уход подвижного состава. 10. Наезд на препятствие и тупиковые упоры. 11. Взрез стрелки. 12. Заклинивание колёсной пары в поезде. 13. Падение на путь или ходовую балку деталей подвижного состава. 14. Нарушение габарита подвижного состава, габарита приближения оборудования, габарита приближения строений. 15. Неисправность подвижного состава, пути, контактного рельса, устройств электроснабжения, СЦБ, связи, тоннельных сооружений, электромеханических и других устройств, затопление, пожар.
4). К повреждениям относятся: 1. Оставление в тоннелях или на наземных участках (для монорельсовой транспортной системы — на ходовой балке или смотровых ходах) после ночных работ незакреплённого оборудования, инструмента и других предметов, на которые возможен наезд подвижного состава.
Согласно «Правилам технической эксплуатации метро» (ПТЭ) (Ссылка. http://www.xjob.ru/ПТЭ_метро) основные «Средства сигнализации при движении поездов» являются»: П. 18.18. Основным средством сигнализации при движении поездов является автоматическая локомотивная сигнализация с автоматическим регулированием скорости (АЛС-АРС) или путевая автоматическая блокировка с автостопами и защитными участками. Линии, где АЛС-АРС является основным средством сигнализации при движении поездов, должны дополнительно оснащаться резервным средством сигнализации – автоматической блокировкой без автостопов и защитных участков. Используя предлагаемый способ – мониторинг онлайн, с помощью БПЛА - сопровождения поезда метрополитена и систему (АЛС-АРС) повышаем степень безопасности движения и безаварийной эксплуатации линий движение поездов метрополитена. Как было сказано ранее, управление беспилотным БПЛА осуществляется вычислительным комплексом (ВК) с искусственным интеллектом (ИИ) и при необходимости, в ручном режиме по беспроводной линии связи. Причём в (ВК) закладывается информация об аварийных режимах, на которые следует реагировать. Полёт беспилотного летательного аппарата (БПЛА) производится со скоростью движения поезда метрополитена, но в случае необходимости полёт БПЛА может производится с превышением скорости или с меньшей скоростью движения поезда. Функциональные возможности БПЛА при движении:
Мониторинг состояния железнодорожного полотна на наличие препятствий в режиме реального времени.
Мониторинг состояния контактной сети в режиме реального времени и при просмотре в записи.
Мониторинг окружающей инфраструктуры по пути движения в режиме реального времени и в записи.
Заявленный способ и устройство, обеспечения безопасности движения поезда метрополитена работает следующим образом: При наличии аварийной ситуации, выявленной вычислительным комплексом (ВК) с искусственным интеллектом (ИИ), при мониторинге с борта БПЛА, информация поступает - в кабину машинисту и пульт диспетчера, для автоматического или ручного реагирования, например, тормозной системой поезда. БПЛА кроме обычной системы видеокамер, для более эффективной работы в зоне снижения видимости может быть оснащён инфракрасной (ИК) камерой. Полёт БПЛА на маршруте движения поезда происходит с остановкой, совместно с остановкой поезда на станциях остановки. На станциях остановки, для зарядки БПЛА установлены стационарные пункты зарядки, причем пункты зарядки снабжены зарядными автоматическими устройствами, контактного или бесконтактного исполнения. Как вариант, пункт зарядки может быть смонтирован на крыше локомотива и выполнен с контактным или бесконтактным зарядным устройством. Для функционирования системы мониторинга онлайн, необходим БПЛА вертикального взлёта и посадки, со скоростями самолёта и возможностью функции зависания – вертолёта. Существующие лучшие модели квадрокоптеров - беспилотников поднимаются и опускаются, и передвигаются со скоростью 30-40 км/ч, но наиболее распространенным параметром скорости горизонтального движения остается показатель в 10-15 км/ч. то есть квадрокоптеры не в состоянии обеспечить сопровождение высокоскоростных поездов. Технический результат, позволяющий обеспечить сопровождение высокоскоростных поездов БПЛА, достигается тем, что БПЛА выполнено с несущим крылом, все установленные тяговые движители БПЛА используются в режиме подъёма спуска и маневрирования. в режиме многороторного вертолёта – мультикоптера. В режим горизонтального полёта, при наличии крыла, все движители переводятся в режим горизонтальной тяги. Перевод в режим горизонтальной тяги производится без дополнительных исполнительных механизмов, только силой тяги установленных на аппарате движителей. Для поворота движителей в режим горизонтальной тяги создаётся равновесная система между парой жёстко соединённых прямолинейным элементом, расположенным вдоль продольной оси летательного аппарата, движителей. Как вариант, движители установлены на концах крыльев на поворотных осях. При подъёме БПЛА, на движителях создают тягу равную по величине и перпендикулярную к земле, при этом, при достаточной тяге, происходит подъём летательного аппарата. Следующим этапом нарушается равновесие тяги соединённых прямолинейным элементом движителей, то есть на задним движителе увеличивается тяга, а на переднем уменьшается, и система «пара движителей» получает вращение, при установлении тяги горизонтального направления на движителях, тяги сравниваются по величине и аппарат получает результирующий горизонтальный вектор тяги от пары движителей. Вертикальный спуск летательного аппарата производится в обратном порядке. Равновесие на движителях при данном способе можно установить при любом угле поворота системы, чем обеспечивается направление тяги в плоскости вдоль продольной оси летательного аппарата. Для более стабильного поворота пары движителей, прямолинейный элемент закреплён на поворотной оси, жестко связанной с крылом БПЛА. Для фиксации движителей в вертикальном или горизонтальном положении в узле поворота на оси установлены устройства фиксации или механизм торможения, позволяющие получить жёсткое соединение движителей с аппаратом в различных режимах полёта. Движители, создающие тягу конструктивно могут быть выполнены - винтовыми, турбовинтовыми реактивными и так далее, но при исполнении движителей с винтами требуется компенсировать реакцию вращающего винта, то есть вращение пары винтов должны иметь разное направление, особенно при работе в режиме мультикоптера. Дополнительно, для стабильной работы БПЛА в переходных режимах, БПЛА возможно снабдить движителем, например, в носовой части БПЛА, создающим только горизонтальную тягу.
Технический результат изобретения, достигается тем, что согласно заявленного способа и применение БПЛА для осуществления способа:
Используются в системе мониторинга состояния железнодорожного пути, беспилотные летательные аппараты (БПЛА), что позволяет при движении поездов метрополитена проводить онлайн мониторинг состояния железнодорожного пути, с выводом информации в вычислительный комплекс (ВК) с искусственным интеллектом (ИИ), в кабину машинисту и оператору центра дистанционного контроля и управления, по бесконтактным линиям связи. Это обеспечивает безопасность движения железнодорожного транспорта метрополитена.
Проводится мониторинг состояния контактной сети в режиме реального времени и при просмотре в записи. Это позволяет осуществлять безопасную эксплуатацию контактной сети.
Проводится мониторинг окружающей инфраструктуры, по пути движения, как в режиме реального времени, так и в записи. Это позволяет осуществлять безопасную эксплуатацию железнодорожной инфраструктуры метрополитена.
Применяется в системе для мониторинга БПЛА вертикального взлёта и посадки со скоростью самолёта и возможностями мультикоптера. Это позволяет осуществлять мониторинг состояния железнодорожного пути при движении поезда метрополитена и обеспечить безопасность движения.
Используются в системе мониторинга по дистанции БПЛА, со стационарными или расположенными на локомотиве пунктами зарядки. Это делает экономически целесообразно использование аккумуляторов с ёмкостью достаточными для преодоления дистанции между остановками поезда метрополитена.
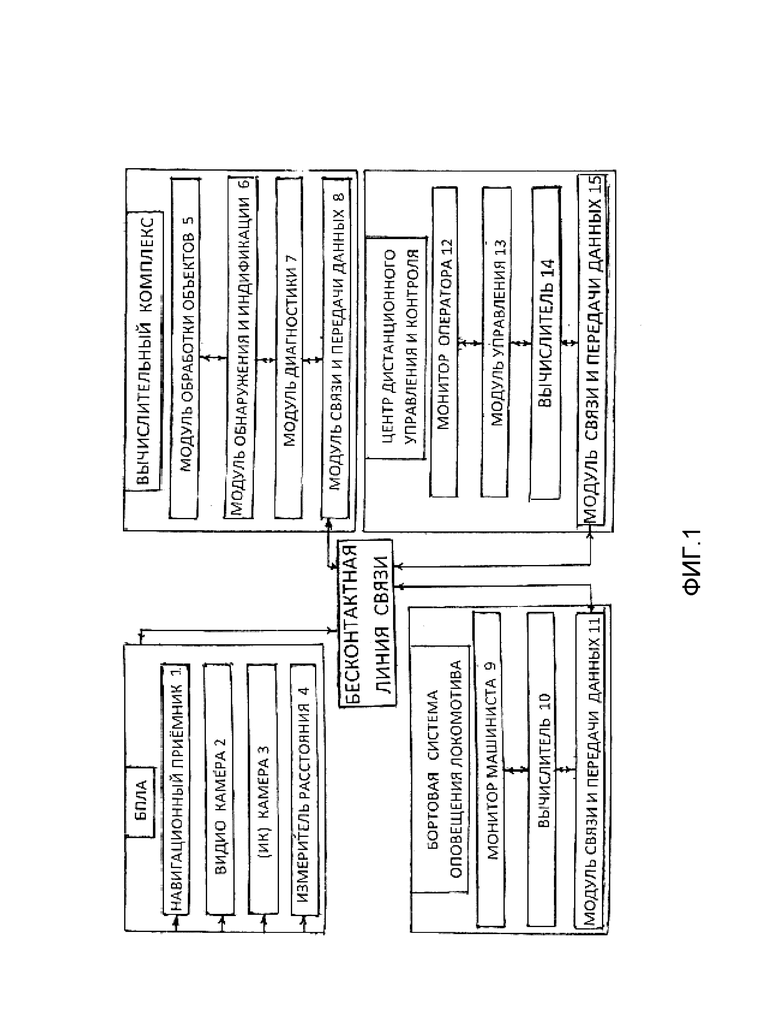
На фиг.1 представлена блок-схема инфраструктурной системы технического зрения, обеспечения безопасности движения поездов, с применением БПЛА в качестве носителя датчиков технического зрения, летящего впереди поезда метрополитена на дистанции, достаточной для реагирования вычислительным комплексом (ВК), машинистом поезда и оператором центра дистанционного контроля и управления.
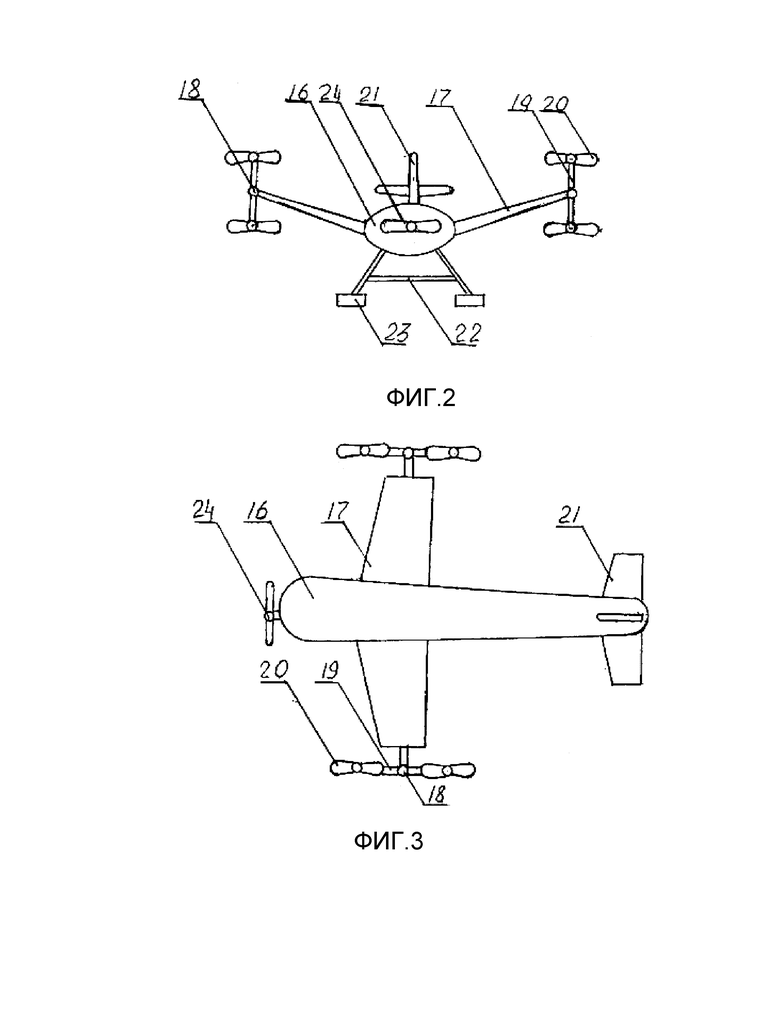
На фиг.2 представлен БПЛА вертикального взлёта и посадки используемой в системе, показанный в режиме горизонтального полёта. Вид спереди.
На фиг.3 представлен БПЛА вертикального взлёта и посадки используемой в системе, показанный в режиме взлёта и посадки. Вид сверху.
Системы мониторинга, обеспечения безопасности движения поездов, с применением БПЛА в качестве носителя видеокамер, работающими в различных частотных диапазонах, летящим впереди поезда на дистанции, достаточной для реагирования вычислительным комплексом (ВК), машинистом поезда и оператором центра дистанционного контроля и управления содержит: Установленные на БПЛА навигационный приёмник 1, видеокамеру 2, ИК камеру 3, измеритель расстояния 4. Вычислительный комплекс (ВК) с искусственным интеллектом снабжён модулем обработки объектов 5, модулем обнаружения и идентификации 6, модулем диагностики 7 и модулем связи и передачи данных 8. Бортовая система оповещения локомотива оснащена монитором машиниста 9, вычислителем 10 и модулем связи и передачи данных 11. Центр дистанционного управления и контроля оснащён монитором оператора 12, модулем управления 13, вычислителем 14 и модулем связи и передачи данных 15. Связь в системе осуществляется через бесконтактную линию связи . В системе, используется БПЛА вертикального взлёта и посадки состоящий из фюзеляжа 16, крыльев 17, с установленными на концах крыльев 17 на осях 18 с фиксаторами положения (на фиг не показаны) поворотными прямолинейными элементами 19. На концах прямолинейных элементов 19 установлены движители20 с воздушными винтами. На БПЛА установлено хвостовое оперение21 и шасси 22 с установленными контактными площадками зарядки 23. Дополнительно БПЛА снабжён движителем 24 с воздушным винтом.
Работа системы осуществляется при запуске БПЛА впереди поезда. При этом осуществляется непрерывный мониторинг датчиками, установленными на борту БПЛА состояния железнодорожного пути, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления. Связь в системе: между БПЛА, вычислительным комплексом (ВК) с искусственным интеллектом, бортовой системой оповещения локомотива и центром дистанционного управления и контроля осуществляется бесконтактной линией связи. Сигналы управления БПЛА обеспечиваются через линии связи и дополнительно через навигационный приёмник 1. Элементы блок - схемы могут меняться в зависимости от уровня развития искусственного интеллекта, системы связи и развития элементной базы. Работа БПЛА вертикального взлёта и посадки осуществляется следующим образом: БПЛА в режимах подъёма, спуска и зависания работает в режиме многороторного вертолёта – мультикоптера. При этом, вертикальная тяга создаётся при повороте, установленных на концах крыльев 17, на осях 18 прямолинейных элементов19 с движителями 20 с воздушными винтами, горизонтально поверхности земли. Прямолинейные элементы 19 в этом положении фиксируются фиксаторами положения и при создании тяги движителями 20 с воздушными винтами БПЛА отрывается от земли. В этом режиме БПЛА работает в режиме квадрокоптера. При наборе высоты, выше контактной сети, БПЛА переводится в режим самолёта, то есть прямолинейные элементы 19, вращаясь на осях18 занимают вертикальное положение и фиксируются. Движители 20 с воздушными винтами, при работе создают горизонтальную тягу. Дополнительно включается движитель 24 с воздушным винтом, создающим горизонтальную тягу. БПЛА набирая скорость летит впереди поезда обеспечивая мониторинг пути движения поезда. Посадка БПЛА осуществляется при создании вертикальной тяги движителями 20 в режиме квадрокоптера. Зарядка БПЛА осуществляется на пунктах зарядки, установленных на стоянках поездов метрополитена.
Изобретение относится к способу и устройству обеспечения безопасности на транспорте метрополитена и может быть использовано для определения и идентификации объектов, находящихся на путях следования транспорта метрополитена, создающих аварийную ситуацию, путём передачи информации в режиме онлайн, с борта летящего впереди поезда беспилотным летательным аппаратом (БПЛА), машинисту поезда и оператору центра дистанционного контроля и управления, о наличии препятствий и аварийных ситуаций в зоне контроля БПЛА. Мониторинг производится видеокамерами, работающими в различных частотных диапазонах, установленными на БПЛА, летящем впереди поезда метрополитена, со скоростью равной или превышающей скорость движения поезда. Управление БПЛА осуществляется вычислительным комплексом с искусственным интеллектом или в ручном режиме. Проводиться непрерывный мониторинг состояния железнодорожного пути метрополитена, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления для безопасности всех движущихся средств. 2 н. и 5 з.п. ф-лы, 3 ил., 2 табл.
1. Способ обеспечения безопасности при движении поезда метрополитена, включающий режим онлайн мониторинга состояния железнодорожного пути, контактной сети и инфраструктуры пути следования, на предмет аварийных ситуаций и режимов, влияющих на безопасность движения и эксплуатации метрополитена, при поступлении информации по беспроводной линии связи на вычислительный комплекс, бортовую систему оповещения локомотива и центр дистанционного управления и контроля, с видеокамер, работающими в различных частотных диапазонах, установленными на беспилотном летательном аппарате, летящем впереди поезда метрополитена, со скоростью равной или превышающей скорость движения поезда, с управлением беспилотным летательным аппаратом вычислительным комплексом с искусственным интеллектом, или в ручном режиме, машинистом поезда или оператором центра дистанционного управления, по сигналам полученным по беспроводной линии связи от датчиков ориентации, установленных на беспилотном летательном аппарате.
2. Способ обеспечения безопасности при движении поезда метрополитена по п. 1, отличающийся тем, что мониторинг производится в полёте беспилотным летательными аппаратом, с электрическими винтомоторными группами, с зарядкой аккумуляторов на дистанции на автоматических пунктах зарядки, размещенными на остановках поезда метрополитена.
3. Способ обеспечения безопасности при движении поезда метрополитена по п. 1, отличающийся тем, что мониторинг производится в полёте беспилотным летательными аппаратом, с электрическими винтомоторными группами, с зарядкой аккумуляторов на дистанции на автоматических пунктах зарядки, размещенных на крыше локомотива.
4. Способ обеспечения безопасности при движении поезда метрополитена по п. 1, или 2, или 3, отличающийся тем, что на автоматических пунктах зарядки, зарядка беспилотных летательных аппаратов производится с помощью бесконтактного зарядного устройства.
5. Беспилотный летательный аппарат вертикального взлёта и посадки, применяемый в системе непрерывного мониторинга состояния железнодорожного пути метрополитена, летящим впереди поезда, состоит из летательного аппарата самолётной конструкции, с установленными по концам крыльев вдоль фюзеляжа, на поворотной оси линейными элементами с закреплёнными на концах линейных элементов движителями с воздушными винтами, линейные элементы снабжены фиксаторами положения, при взлёте, посадке и зависании линейные элементы располагаются параллельно земле и движители создают тягу перпендикулярно земле, а в режиме горизонтального полёта линейные элементы располагаются перпендикулярно земле и движители создают тягу параллельно земле, беспилотный летательный аппарат оснащён видеокамерами различных частотных диапазонов и датчиками ориентации, при этом беспилотный летательный аппарат выполнен с возможностью приема сигнала от системы управления, включающей вычислительный комплекс с искусственным интеллектом, пульт управления, расположенный в локомотиве, и пульт управления, расположенный в центра дистанционного управления, с возможностью связи между элементами системы, блоками беспроводной линии связи.
6. Беспилотный летательный аппарат вертикального взлёта и посадки, применяемый в системе непрерывного мониторинга состояния железнодорожного пути метрополитена по п. 5, отличающийся тем, что снабжён движителем с воздушным винтом, создающим горизонтальную тягу.
7. Беспилотный летательный аппарат вертикального взлёта и посадки, применяемый в системе непрерывного мониторинга состояния железнодорожного пути метрополитена по п. 5 или 6, отличающийся тем, что беспилотный летательный аппарат выполнен с электрическими движителями с воздушными винтами.
| WO 2019035960 A1, 21.02.2019 | |||
| WO 2020118373 A1, 18.06.2020 | |||
| US 20200095741 А1, 26.03.2020 | |||
| WO 2020107099 A1, 04.06.2020 | |||
| US 20220258779, 18.08.2022 | |||
| US 20180237086 A1, 23.08.2018 | |||
| KR 101668018 B1, 21.10.2016 | |||
| CN 106936171 A, 07.07.2017 | |||
| CN 203638093 U, 11.06.2014 | |||
| US 20190127056 А1, 02.05.2019. |

