Изобретение относится к измерительной технике, может быть использовано в информационно-измерительных системах и является усовершенствованием изобретения по авт.св. № 1563729.
Цель изобретения - повышение точности путем уменьшения дрейфа нуля интегратора в условиях времяимпульсной выдачи данных,
На фиг. 1 представлена схема устройства, реализующего способ измерения линейных перемещений; на фиг.2 - блок управления, вариант выполнения; на фиг.З - временные диаграммы работы устройства.
Устройство, реализующее способ, содержит резистивнй датчик 1, блок 2 питания, шины О и А которого соединены с неподвижными выводами резистивного датчика 1, четыре электронных ключа 3-6. аналоговые входы которых соединены соответственно с подвижным выводом резистивного датчика 1 и шинами В, С и О блока 2 питания, последовательно соединенные усилитель 7 постоянного тока, вход которого соединен с выходами электронных ключей 3-6, интегратор 8, компаратор 9. второй вход которого соединен с шиной С блока 2 питания, и блок 10 управления, первые три выхода которого соединены с синхронизирующими входами соответствующих ключей 3-5. Устройство содержит нуль-орган 11, входы которого соединены с выходом интегратора 8 и шиной О блока 2 питания, а выход - с вторым входом блока 10 управления, соединенный с его третьим входом задзтчик 12 выдачи данных, первый и второй счетчики 13 и 14, счетные входы которых соединены соответственно с четвертым и пятым выходами блока 10 управления, а обнуляющие входы - с шестым выходом блока 10 управления и последовательно соединенные пятый электронный ключ 15, аналоговый вход которого соединен с вторым входом нуль-органа 11, а синхронизирующий вход - с синхронизирующим входом четвертого электронного ключа 6 и седьмым выходом блока 10 управления, аналогово запоминающий блок 16 и фазоинверсный усилитель 17,выход которого соединен с входом интегратора 8
Блока 10 управления может быть выполнен в виде первой схемы 3 ИЛИ 18, первые два входа которой представляют собой первый и второй входы блока 10 управления, второй схемы 3 ИЛИ 19, первый вход которой соединен с первым входом схемы 3 ИЛИ 18, одновибратора 20, вход синхронизации которого представляет собой третий вход блока 10 управления. Бдок 10 содержит регистр 21 сдвига, управляющий, синхронизирующий и установочный входы которого соединены соответственно с выходами первой и второй схем 3 ИЛИ 18 и 19 и одновибратора 20. Первые три выхода представляют собой соответствующие выходы блока Юуправления, а четвертый - седьмой выход и соединен с R-входом одновибратора 20, который может быть выполнен в виде RS0 триггера, генератора 22 трех схем 2 И 23- 25, первые входы которых соединены с выходом генератора 22, вторые - с соответствующими выходами регистра 21 сдвига. Выход второй схемы соединен с вторым
5 входом второй схемы 3 ИЛИ 19 и представляет собой четвертый выход блока 10 управления, а выход третьей схемы представляет собой пятый выход блока 10 управления.
0Блок 10 управления содержит дополнительного счетчика 26, установочный вход которого соединен с выходом одновибратора 20 и представляет собой шестой выход блока 10 управления, счетный вход - с выходом
5 первой схемы 2 И 23, а выход - с третьими входами схем 3 ИЛИ 18 и 19, напряжения через времязадающую цепочку.
Способ реализуется следующим образом.
0При включении питания на установочный вход одновибратора 20 подается импульс, устанавливающий на выходе одновибратора 20 напряжение логической единицы, поступающей на установочные
5 входы регистра 21 сдвига и счетчика 26, а через выход - на обнуляющие входы счетчиков 13 и 14.
При поступлении логической единицы на установочный вход регистра 21 сдвига на
0 его первом выходе устанавливается логическая единица, а на остальных выходах - логические нули При поступлении импульсов на обнуляющие входы всех счетчиков 13 и 14 они устанавливаются а состояние, при
5 котором с их выходов снимаются логические нули. Предполагается также, что при включении интегратор 8 устанавливается в нуль, Вследствие наличия на первом выходе регистра 21 логической единицы, которая при0 сутствует также на входе электронного ключа 3, после включения питания напряжение с подвижного вывода резистивного датчика 1 через усилитель 7 поступает на интегратор 8.
5Под воздействием напряжения, снимаемого с резистивного датчика 1, интегратор 8 заряжается до напряжения Увых (на фиг.З показаны два напряжения Ui и U, причем диаграмма для и2вых показана пунктиром). В указанном состоянии электронные ключи
4 - 6 и 15 после включения закрыты длг, прохождении через них напряжений
Логическая единица г, первого выхода регистра 21 подается также на вход схемы 2 И 23 на другой вход которой подаются импульсы с частотой f от генератора 22 Пропущенные через схему 2 И 23 импульсы поступают на сметный вход счетчика 26 Таким образом, с началом интегрирования на пряжения резистивного датчика 1 начинается и одновремрнный счет количества импульсов, следующих с частотой f на вход счетчика 26 Количество импульсов, на которое рассчитан счетчик 26, определяет длительность первого такта интегрирования
После подсчета определенною количе ства импульсов на выходе счетчика 26 пояа ляегся логическая единица когорт через хемы 3 ИЛИ 18 и 3 ИЛИ 19 подаемся на управляющий вход и пход синхронизации регистра 21 обеспечивая тем самым сдвиг логической единицы с первого выхода реги сгра 21 на второй вы/од С него логическая единица подается на вход кл.очп 4 и вход схемы 2 И 24 Через схему 2 И 24 начинают поступать импульсы с частотой f на чствер тый выход бюка 10 Vi pmneiHi4 и на счетный вход счетчи п 13
Войду смещения /роьн ичрс й единицы с о и 1 морои внл„д регис1 ря 21 ключ 3 v схема 2 И о, закрыт д с прохождения и1 Нс мо С чомонта (п крывания ключа 4 Нг. ртзрчд ичтегРТтОра 8 ОТ ШИНЫ В ПОЛЯрНО П UiOpOn
против по ОУ- на измеряемому нипр«не нию язрчд интегратора 8 длите ч до по ступени;- первого чмпупьса i момент С( абатыванич киммарагирэ 9
Срабатывание ког .парттора г происходит при равенстве напряжении подавае мых на комп ратор от шит1 С и от интегратора 3 В момент раге ь та напряжен иГ1 i-омпчратор О внрабатывтет им пульс, oropiii1 п0,1,31 ,гя на с/ем, 3 8 и дчлее на управляющг 1 ,д регистра 21 t резу/г гате п)С1упления уппаьляющс го и синхронизирующего сигнала от гчегч.чка 26 логич 1-эя единица с втпг иги выходе) р°ги- стр,)21 сдвигается на тр.чип Ыаэтом горой такт ичтегрировсзния заканчивается и одновременно на тмаетгя Tpuui 1 такт ин гегрирсмзания в процессе KOTn,-joiO чкрез ключ 5т пход интеграпрг 8 nri i, иает на- мряжини.3 с вь(- да шины С блока 5 питания и одновременно , сы с выход генератора 22 черсз 2 И 2ь и пятый выход блока 10 управления поступают на счетный РХОД счетчика 14 ритп/ такт осу- ществл етсг- при на тчии ло /.ческой еди ницы на входе ключа 5 и входе с емч 2 И 24
По достижении напряжения равного нулю, срабатывает нуль-орган 11 при оюм импульс нуль-органа 11 через блок 10 управления и схемы 3 ИЛИ 18 и 19 поступает на
управляющий вхо , и синхронизирующий вход регистра 2 обеспечивал при этом сдвиг логической единицы с третьего НЕ ет- вертый выход С выхода четвертого регистра 21 логическая эдиница поступав, на вход
эдяовибратора 20, на выходе которого устанавливается нулевой потенциал, а через седьмой выход блока 10 управления - на входы синхронизации ключей 6 и 15.
Ключ 5 и схема 2 И 25 в указанный момеит времени закрываются для про ожде- ни через mix си на/юв такт л IL.-I рирования при этом заканчивается При открытые КЛЮЧР f 15 на вход интегратора Ь подается напряжение с шины О,
ча киюрой трисутствует ну ieeo / потэнци- ил d вьиод интегратора 8 через вход и второй выход нуль-opiaHa 11 подключается к входу аналогового запоминающего блока 16 который фиксирует уровень напряжения
на вь коде инте1 ратора
С, гогс что на вход интегратора Ь подается нулевое .агряжение с о,иьы О, г ,.-) выходе интегратора в указанном состоянии определяется уровень смещения
нуля который фиксируется аналоговым за- по инающнм 6/юком 16 С его выхода нг npiteHne см „иен ИР нуля бре ф.атоинверсныи vcили eль 17 подается на д интегратора 8 предотвращач при JTOM
и( то( рироеание напряжения смещения,
vVaj (иное состояние длится до поступления импульса с выхода задзтчика 12 знда- чп данных (е /эчсствз зада чика мохст / пользоваться внеи нее устро стао , котор и посту пае на ход одноа чбоатсра 20, ус энавливая на i го вь.лсде состояние логи- ч гкии единицы При -том обгспечиваетск по, юрнсе интегрирование и одного пз РРЗИСТИВНОГО да ника 1 с учетом смеще
чи , нуля интегрчт орл и ог.рео.р it1 ия нового нач 1ия и ia4 иксироваш ото дс ш нпи сч тчикг.ми 13, 1 и д з ечение длительнее™ агей работы /crpo /.cTi
Применечи предка аемьи спосооа измирснпя линейнь перемещений и устрой- стг гля его реализации обеспечивает кпк/пенСЕцию погрешности измерений, обусловленную дрейфом нуля интегратора В результате повышаете темность измеренил линейных порег ещений
Формула изобретения 1 Способ измерения линейных перемещении по авт ев 1563729 с ; л г ю- щ и и с я тем -то целью повышения
точности при времяимпульсной выдаче данных, перед каждым интегрированием выходного напряжения резистивного датчика определяют величину и знак смещения нуля интегратора и совместно интегрируют выходной сигнал резистивного датчика и напряжение смещения нуля интегратора.
2. Устройство для измерения линейных перемещений,отличающееся тем.что, с целью повышения точности при времяимпульсной выдаче данных, оно снабжено первым дополнительным электронным ключом, аналоговый вход которого соединен с нулевой шиной блока питания, а выход - с
входом усилителя постоянного тока, последовательно соединенными вторым дополнительным электронным ключом, аналоговый вход которого соединен с вторым выходом нуль-органа, аналоговым запоминающим блоком и фазоинверсным усилителем, выход которого соединен с входом интегратора, и задатчиком выдачи данных, а блок управления выполнен с дополнительными входом, соединенным с выходом задатчика выдачи данных, и выходом, соединенным с синхронизирующими входами первого и второго дополнительных ключей.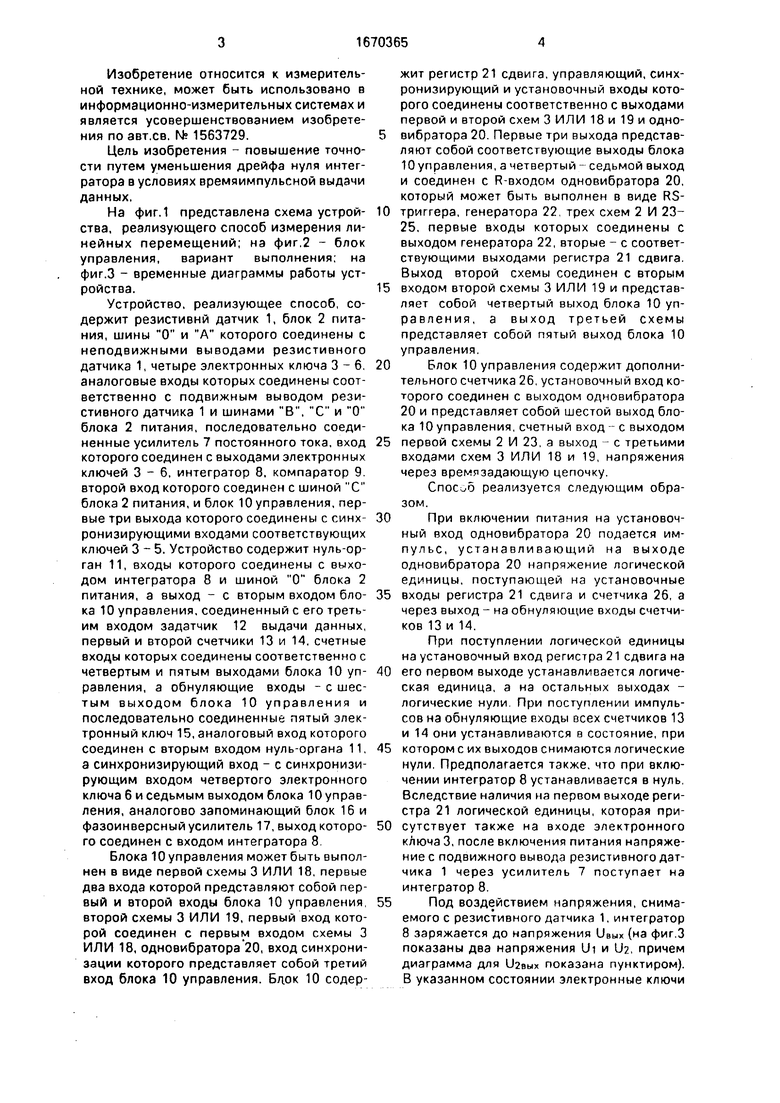

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения линейных перемещений и устройство для его осуществления | 1988 |
|
SU1563729A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| Многофункциональный преобразователь | 1985 |
|
SU1267443A1 |
| Устройство для стабилизации частоты выходного напряжения генератора | 1989 |
|
SU1772886A1 |
| Вибростенд | 1983 |
|
SU1156026A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОСЫ ПРОПУСКАНИЯ ПРОСТРАНСТВЕННО-ЧАСТОТНОГО КАНАЛА ЗРИТЕЛЬНОЙ СИСТЕМЫ | 2009 |
|
RU2417734C1 |
| Устройство для вычисления показателя экспоненциальной функции | 1982 |
|
SU1043677A1 |
| Амплитудно-фазовый анализатор гармоник | 1985 |
|
SU1272272A2 |
| Устройство для измерения средних значений нестационарных сигналов | 1985 |
|
SU1347028A1 |
| Цифроаналоговый преобразователь | 1982 |
|
SU1051701A1 |

Изобретение относится к измерительной технике. Цель изобретения - повышение точности за счет уменьшения дрейфа нуля интегратора в условиях времяимпульсной выдачи данных. В ходе измерений на вход интегратора 8 подается нулевое напряжение с шины "0". Уровень смещения нуля запоминается аналоговым запоминающим блоком 16, сигнал с выхода которого через фазоинверсный усилитель 17 подается на вход интегратора 8, предотвращая интегрирование напряжения смещения. Процесс происходит до поступления импульса с задатчика 12 выдачи данных на вход одновибратора, устанавливая на его выходе уровень логической единицы, что обеспечивает повторное интегрирование сигнала с резистивного датчика 1 с учетом дрейфа нуля и определение нового значения, фиксируемого до перемещений счетчиками 13 и 14 в течение работы устройства. 2 с.п.ф-лы, 3 ил.
Фиг. г
Мрмент fa/iMwe/н/я n
i i M
Л.
Фиг.З
| Способ измерения линейных перемещений и устройство для его осуществления | 1988 |
|
SU1563729A1 |
