сл
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитно-инерциальный измеритель | 1985 |
|
SU1379755A1 |
| Магнитно-инерциальный измеритель | 1988 |
|
SU1688208A2 |
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНОГО ТОКА ТРЕХФАЗНОЙ СЕТИ | 1991 |
|
RU2093839C1 |
| Устройство для электромагнитного каротажа | 1981 |
|
SU998995A1 |
| Металлоискатель | 1980 |
|
SU911416A1 |
| Устройство для измерения параметров линейного перемещения | 1988 |
|
SU1812503A1 |
| Синтезатор частот | 1986 |
|
SU1478284A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437136C2 |
Изобретение относится к измерительной технике, а именно к устройствам измерения магнитных полей, устанавливаемых на борту подвижных объектов, с одновременным определением параметров движения, и может быть использовано для проведения аэромагнитных измерений, а также поиска локальных магнитных аномалий. Цель изобретения - расширение функциональных возможностей путем увеличения количества и порядка измеряемых производных - достигается введением умножителей 14, 15, блоков 16, 17 интегрирования, выполненных в виде последовательно соединенных в цепь отдельных интеграторов, и алгебраического сумматора 18. Измеритель также содержит чувствительный элемент 1, модулятор 2, автогенератор 3, преобразовательный блок 4, выполненный в виде инерционных катушек 5, 6, фазовращателя 7, алгебраических сумматоров 8, 9, 18 и умножителей 10, 11, 12, 13. 1 ил.
Изобретение относится к измерительной технике, а именно к устройствам измерения магнитных полей, устанавливаемых на борту подвижных объектов с одновременным определением параметров движения, и может быть использовано для проведения аэромагнитных измерений, а также поиска локальных магнитных аномалий.
Цель изобретения - расширение функциональных возможностей путем увеличения количества и порядка измеряемых производных.
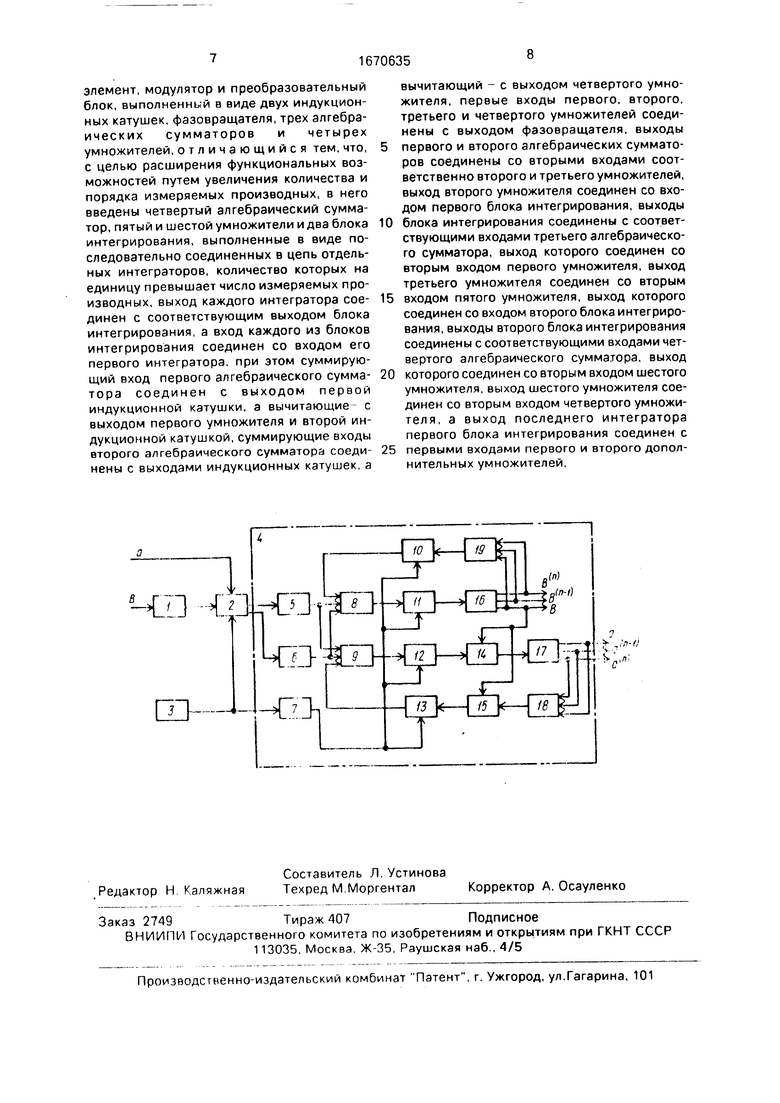
На чертеже представлена структурная схема измерителя.
Измеритель состоит из чувствительного элемента 1, модулятора 2, автогенератора 3 и преобразовательного блока 4. содержащего первую и вторую индукционные катушки 5 и 6, фазовращатель 7, первый и второй алгебраические сумматоры 8,9, первый, второй, третий, четвертый, пятый и шестой умножители 10,11,12,13,14 и 15, первый и второй блоки 16, 17 интегрирования и третий и четвертый алгебраические сумматоры 18 и 19. Каждый из блоков интегрирования состоит из последовательно соединенных в цепь отдельных интеграторов, количество которых в каждом из двух каналов измерения по крайней мере на единицу превышает число измеряемых в данном канале производных. Выход каждого интегратора в каждом канале является выходом соответствующей производной, измеряемой в данном канале, и представляет собой соответствующий выход блока интегрироваО
4j о о со сл
ния, включенного в данный канал. Входами блоков 16 и 17 являются входы их первых интеграторов.
Суммирующий вход первого алгебраического сумматора 8 соединен с выходом индукционной катушки 5, вычитающие - с выходом катушки бис выходом первого умножителя 10.
Суммирующие входы второго алгебраического сумматора 9 соединены с выходами индукционных катушек 5,6, а вычитающий - с выходом четвертого умножителя 13. Первые входы первого 10, второго 11, третьего 12, четвертого 13 умножителей соединены с выходом фазовращателя 7. Выходы алгебраических сумматоров 8 и 9 соединены со вторыми входами соответственно второго 11 и третьего 12 умножителей. Выход умножителя 11 соединен со входом блока 16 интегрирования, выходы которого соединены с соответствующими входами алгебраического сумматора 19. Выход сумматора 19 соединен со вторым входом умножителя 10. Выход умножителя 12 соединен со вторым входом умножителя 14, выход которого соединен со входом второгого блока 17 интегрирования. Выходы блока 17 соединены с соответствующими входами сумматора 18, выход которого соединен со вторым входом умножителя 15. Выход умножителя 15 соединен со вторым входом умножителя 13, а выход последнего интегратора блока 16 интегрирования соединен с первыми входами умножителей 14 и 15. Все входы сумматоров 18 и 19 являются суммирующими.
Измеритель работает следующим образом.
При включении автогенератора 3 пьезоэлектрический вибратор с укрепленным на нем ферромагнитным цилиндром, входящим в состав модулятора 2, совершают гармонические колебания. Перемещение ферромагнитного цилиндра приводит к изменению числа витков в катушках 5 и 6, пронизываемых магнитным потоком воспринимающего элемента 1, так как часть из них выступает за край цилиндра. Поэтому выражения для ЭДС EI и Е2 катушек 5 и 6 могут быть записаны в виде
d-Л - t
V, -з(л „.ЦьЕ)|% 2:чьЕ} (,,-MW, n,sei(5.-5ve()
где В - индукция измеряемого магнитного поля;
Wo число витков в катушках, находящихся в воздушном зазоре между цилиндром и воспринимающим элементом при Д| 0;
К2 - шаг намотки катушек 5 и 6; if)- потокосцепление;
А1 - амплитуда колебаний вибратора;
R - внутренний радиус цилиндра модулятора;
So - среднее значение площади перекрытия воспринимающего элемента цилин- дром;
m - масса цилиндра модулятора;
Д|м - амплитуда колебаний цилиндра модулятора;
ki - коэффициент жесткости пьезоэлек- трического вибратора;
а - действующее на объект в плоскости колебаний вибратора линейное ускорение; Й- частота колебаний вибратора. Фазовращатель 7 обеспечивает сдвиг сигнала автогенератора 3, пропорциональный sin Qt , на угол - и формирует на
своем выходе сигнал, пропорциональный cos Qt, необходимый для обеспечения синхронного детектирования.
В результате взаимосвязанной работы блоков устройства на выходах сумматоров 8 и 9 вырабатываются сигналы, определяемые выражениями
.-:ti5.j|.r,..a
(.Осо5Лг1 ,„ . U, .вГЫ,, R . lf.%.
OCCSQ 1.4(05,tttJ-V,,,
где Uio, U13 выходные напряжения блоков 10 и 13;
So - среднее значение площади перекрытия магнитопроводов; Uis, UH выходные напряжения блоков 13 и 14.
Выходное напряжение умножителя 10 описывается соотношением
nf
45Uio cosQtЈ ciyvJ
I 0
(2)
где Ci - коэффициенты усиления сигналов по входам сумматора 19;
п-1 - количество производных от маг- нитной индукции, которые необходимо измерить;
у -выходной сигнал последнего интегратора блока интегрирования 16;
производная 1-го порядка от у, при- чему(0) у.
В связи с тем, что блок 16 предоставляет собой цепь из n последовательно соединен- ных4интеграторов, входной сигнал его равен
+D
Следовательно выходной сигнал последнего интегратора блока 16 описывается выражением - .«..-рг.
1 f „ О . Т t j 1 ,s П t 7 . Г05 П t
Величина у включает относительно медленно меняющуюся составляющую, обусловленную изменением индукции В, и высокочастотные гармоники, обусловленные модуляцией.
В связи с этим, после преобразования получаем следующие передаточные функции от величины В к выходным сигналам интеграторов при условии нумерации их от последнего к первому (последний - нулевой):
A.-niS,l at Q
s 5 , n,C, чй
b .fs-. -f-V. вч
1 0n-1(5)
где I - номер интегратора в блоке интегрирования 16;
S - оператор Лапласа;
W(S)ey - передаточная функция от В к выходу i-ro интегратора (передаточная функция датчика по i-й производной от В. Требуемая полоса частот величины В, в которой измеритель устойчиво работает, определяется коэффициентами Ci. Производные от величины В устройство выдает в полосе частот от нуля до наименьшей из собственных частот. В этом диапазоне частот инерционностью, обусловленной знаменателем передаточной функции (5), можно пренебречь, поэтому после завершения переходного процесса в датчике соотношения между В и выходными сигналами интеграторов имеют вид
(47ГЯУУ0 + Јкг50Ылл (;i
i- О, ., ii (( t )
где yi - выходной сигнал 1-го интегратора;
B(i) - i-я производная от B(t);
B(6)B(t)J.
Если амплитудно-частотная характеристика канала (коэффициент ci) выбрана из расчета пропускания максимальной из частот величины B(t) и подавления несущей частоты Q и ее гармоник, то погрешности, обусловленные несущей, пренебрежимо малы и соотношения (5) описывают выходные сигналы измерителя в канале измерения B(t) и ее производных.
После завершения переходного процесса в канале измерения B(t), работа измерителя в канале измерения ускорителей описывается следующим уравнением:
,)1Ull.4{.os.nn-
j- uOcosrcl .Ы,,
н,
В . i-вЛ. . 2k,SUP
(7)
0
где z - выходной сигнал последнего интегратора блока 17;
к - число интеграторов в блоке 17.
Величину z(t), также как и y(t), можно представить в виде сумм двух составляющих, одна из которых обусловлена a(t), a другая - несущей на частоте Q и ее высшими гармониками, В силу этого уравнения для г имеет вид
.,k, -- s r
)4е:.
:.«.
(В)
где z - составляющая сигнала z(t), обусловленная изменением a(t);
di - коэффициенты усиления по входам
сумматора 18;
к-1 - число измеряемых производных от a(t)
Если инерционность канала измерения B(t) значительно меньше, чем канала измерения
a(t)(что достигается соответствующим выбором коэффициентов с, и di), то после завершения переходного процесса в канале измерения B(t) передаточные функции от величины a(t) к выходным сигнала интеграторов блока 17 имеют вид
87k2RB QuPM
WQZ;(5)
2ClK1 SK 1 + 5kpt,.- -SPl + PJ
, 6V(4frRWo+gkfl50)AE;L . ЈCj.
u и, Ц.-Пt9
Из соотношения (9) следует, что в данном канале после завершения переходного про- цесса имеет место следующая взаимосвязь выходных сигналов блока 17 и линейного ускорения:
8ЯК2РглС1, ч(|)
Zl Ki(4jrRW0 +K2S0)di
,...)
где zi - выходной сигнал i-ro интегратора блока 17 (последний - нулевой).
Таким образом, на выходах последующих интеграторов блоков 16 и 17 в измерителеформируютсясигналы, пропорциональные величинам B(t) и a(t), a на выходах остальных - производные по
времени от этих величин.
Формула изобретения Измеритель производных магнитных полей, содержащий автогенератор, последовательно соединенные чувствительный
элемент, модулятор и преобразовательный блок, выполненный в виде двух индукционных катушек, фазовращателя, трех алгебраических сумматоров и четырех умножителей, отличающийся тем, что, с целью расширения функциональных возможностей путем увеличения количества и порядка измеряемых производных, в него введены четвертый алгебраический сумматор, пятый и шестой умножители и два блока интегрирования, выполненные в виде последовательно соединенных в цепь отдельных интеграторов, количество которых на единицу превышает число измеряемых производных, выход каждого интегратора сое- динен с соответствующим выходом блока интегрирования, а вход каждого из блоков интегрирования соединен со входом его первого интегратора, при этом суммирующий вход первого алгебраического сумма- тора соединен с выходом первой индукционной катушки, а вычитающие с выходом первого умножителя и второй индукционной катушкой, суммирующие входы второго алгебраического сумматора соеди- нены с выходами индукционных катушек, а
сп
вычитающий - с выходом четвертого умножителя, первые входы первого, второго, третьего и четвертого умножителей соединены с выходом фазовращателя, выходы первого и второго алгебраических сумматоров соединены со вторыми входами соответственно второго и третьего умножителей, выход второго умножителя соединен со входом первого блока интегрирования, выходы блока интегрирования соединены с соответствующими входами третьего алгебраического сумматора, выход которого соединен со вторым входом первого умножителя, выход третьего умножителя соединен со вторым входом пятого умножителя, выход которого соединен со входом второго блока интегрирования, выходы второго блока интегрирования соединены с соответствующими входами четвертого алгебраического сумматора, выход которого соединен со вторым входом шестого умножителя, выход шестого умножителя соединен со вторым входом четвертого умножи- теля, а выход последнего интегратора первого блока интегрирования соединен с первыми входами первого и второго дополнительных умножителей.
Jr-ti
| Магнитно-инерциальный измеритель | 1985 |
|
SU1379755A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
