(Л
С
Изобретение относится к области систем автоматического управления и может быть применено при управлении объектами с неполной информацией в процессе их нормального функционирования.
Целью изобретения является расширение функциональных возможностей за Счет обеспечения работоспособности системы идентификации объекта с неполной информацией по вектору тояния.
Пусть динамика объекта описывается уравнениями
(б)х, х(0)х0, (1)
,(2)
где х - n-вектор состояния объекта; z - m-вектор выхода объекта
(т п);
S - m-n-матрица наблюдения; 0 - r-вектор неизвестных параметров.
Предлагаемое устройство реализует итерационную процедуру подстройки параметров и. Пусть после i-й итерации получена оценка вектора параметров б . Рассмотрим систему, аналогичную (1), но отличающуюся тем, что заменено на 0 :
(0-)у, y(t,)V,. (3) Решение системы (3) реализуется в Ьл ке подстраиваемой модели. Вектор параметров 0 поступает из блока аналоговой памяти.
Решение системы (1) на отрезке t;,t 5, можно приближенно представить в виде
3x1 (0-е1 ). («)
t)y(,
Выражение СО представляет собой разложение в ряд Тейлора в окрестности1
ЗУ.
y(t). Производная : вычисляется при
99Зх|45
и это отражается записью -L- v .
- j
«X ,, Эх. т
33 iJ6 1 матРиЧа чувствительности п«г; j-й столбец этой матрицы VP
I V Те1, функция дувстви- so
тельности к j-му параметру и характеризует чувствительность решения x(t) к изменению параметра 0- . Матрица чувствительности удовлетворяет уравнению55
(6)W.....b, 0.
1зе/--зе1
ае
(5)
Решение системы (5) реализуется в
0
Q
5
5 30
35
блоке формирователя функций чувствительности. Задание нулевых начальных условий происходит с помощью блока постоянной памяти через ключ.
Новую оценку вектора параметров определяют из условия минимума функционала качества
40
45
so
55
if,
1
V ||г(г)-5х()Нг -d-C.
J- -г
(6)
i л
Условие минимума приводит к елеО W
дующей системе алгебраических уравнений: t,Mt.ti
J (sw)T sw d-cae (sw)T(z(c)Sy(C)W.(7)
Решая эту систему, находят d9 , а новую оценку получают по формуле
)0(tu, ).(8)
Затем итерационная процедура повторяется с тем различием, что 91 заменяют на .
В вычислителе критерия идентификации реализуется квадрат норм вектора ив;г
Кде||2 1 ав.
(I
Полученное знлие 4ие ||д6И 2 оценивается в порого- ч блоке с заданной точностью Ј„ При выполнении условия ИйвИ2 Јна выходе порогового блока появляется импульс, который подается «т генератор тактовых импульсов и отключает его.
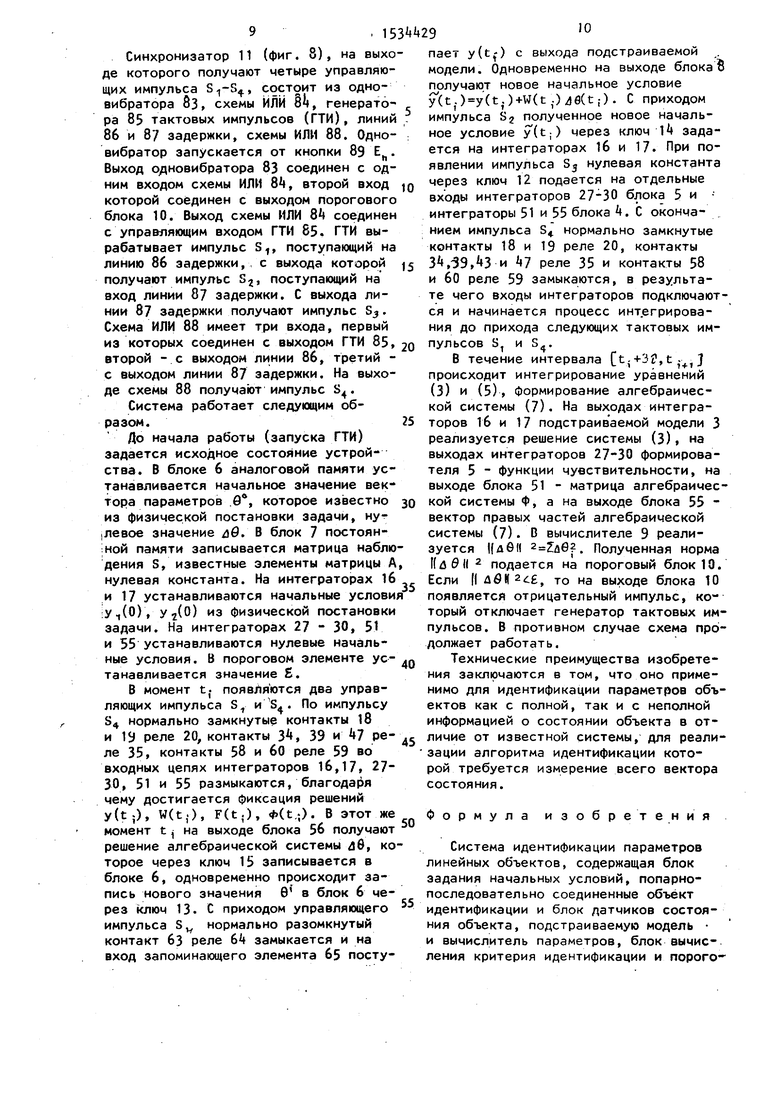
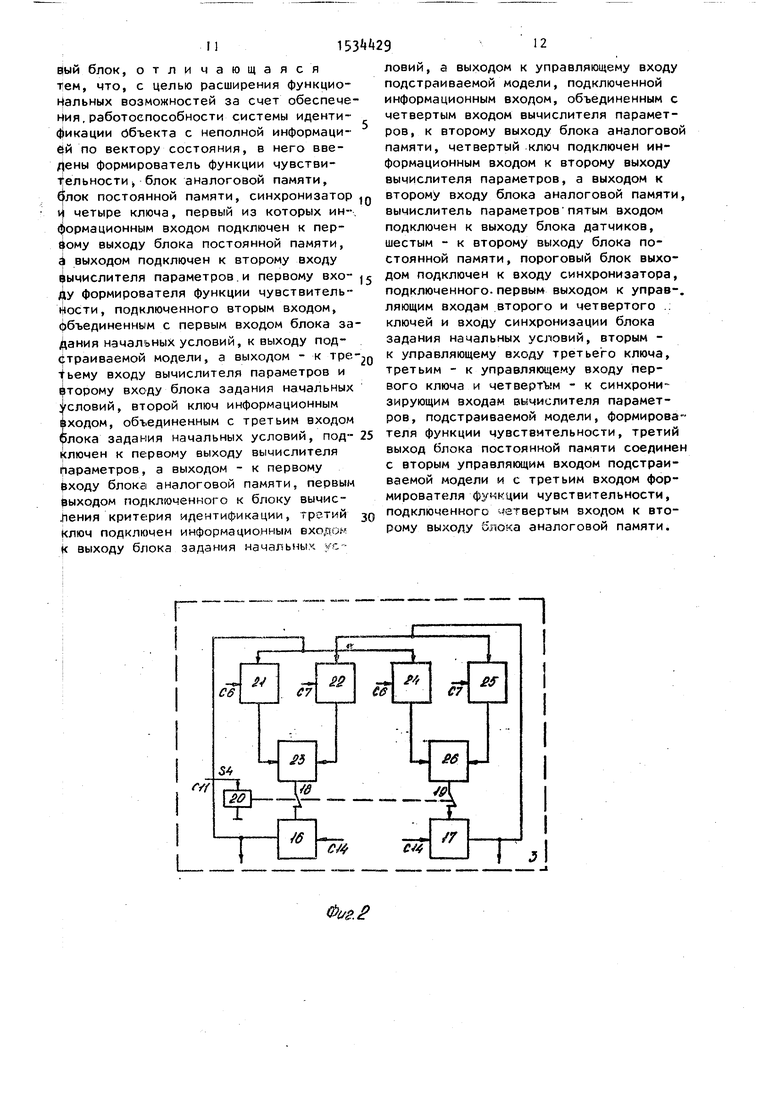
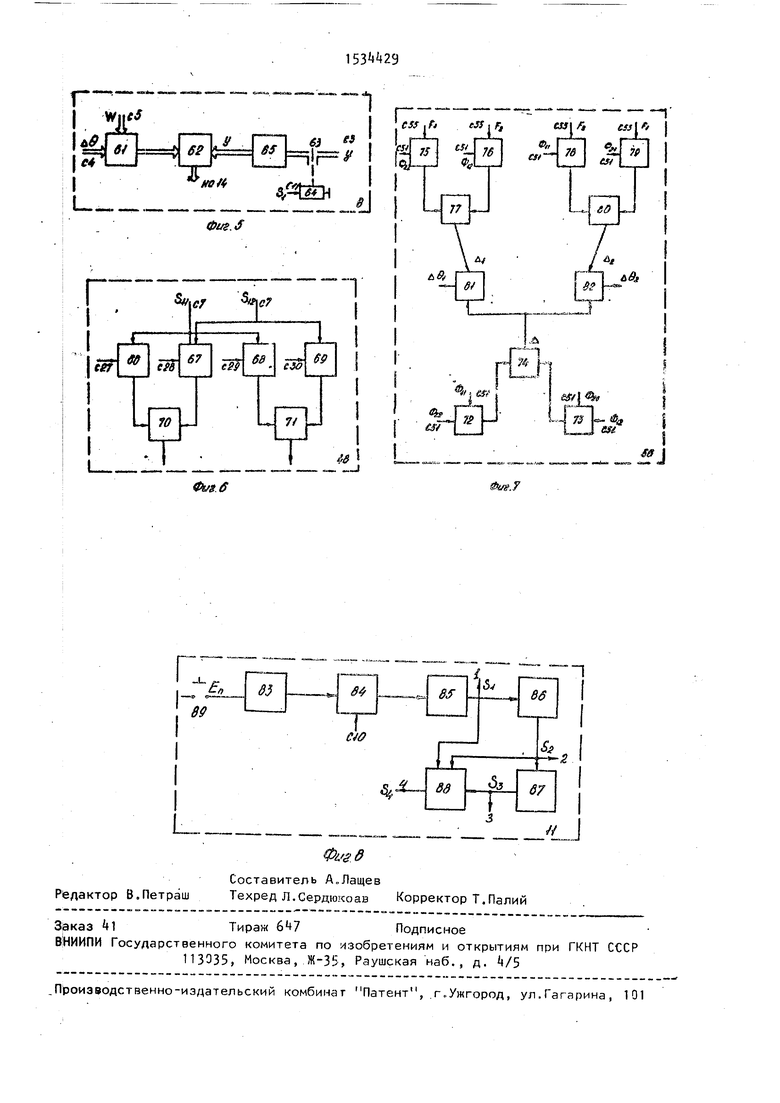
На фиг. 1 представлена блок-схема системы идентификации параметров линейных объектов; на фиг. 2 - функциональная схема подстраиваемой модели; на фиг. 3 - функциональная схема формирователя функций чувствительности;. на фиг. - функциональная схема вычислителя параметров; на фиг. 5 - вариант исполнения блока формирования начальных условий; на фиг. 6 - вариант исполнения блока умножения; на фиг. 7 вариант исполнения блока решения алгебраической системы; на фиг. 8 - вариант исполнения синхронизатора.
Система содержит объект 1 идентификации, блок 2 -датчиков состояния объекта, подстраиваемую модель 3, вычислитель I параметров, формирователь 5 функции чувствительности, блок 6 аналоговой памяти, блок 7 постоянной памяти, блок 8 задания начальных условий, вычислитель 9 критерия идентификации, пороговый блок 10, синхро- низатор 11, ключи 12 - 15.
Вариант исполнения подстраиваемой модели (фиг. 2), описываемой уравнениями (3), рассматривается на примере системы второго порядка
У, -fi-e +a y, , У,(0)у, , (9) егу,+а,7уг, у4(0)-у7.
Подстраиваемая модель состоит из двух интеграторов 16 и 17, входы которых через нормально замкнутые контакты 18 и 19 реле 20 подключены к формирователю правых частей f , и f. Формирователь ff состоит из умножителя 21,
один вход которого соединен с выходом интегратора 16, а другой вход - с отдельным выходом блока 6, умножителя 22, один вход которого соединен с выходом интегратора 17, а другой вход - с отдельным выходом блока 7, сумматора 23, Два входа которого соединены с выходами умножителей 21 и 22 соответственно, а выход сумматора 23 - с входом интегратора 16 через нормально замкнутый контакт 18 и реле 20. Формирователь f состоит из умножителя 2, один вход которого соединен с отдельным выходом блока 6, а другой вход - с выходом интегратора 16, умножителя 25, один вход которого соединен с отдельным выходом блока 7 постоянной памяти, а другой вход - с выходом интегратора 17, сумматора 26, два входа которого соединены, с выходами умножителей 2k и 25 соответственно а выход сумматора 26 соединен с входо интегратора 17 через нормально замкнутый контакт 19 реле 20.
На фиг. 3 представлен вариант исполнения формирователя 5 функций чувствительности, описываемых уравнениями (5). Для системы второго порядка (9) матрица чувствительности W Cw1:W2 удовлетворяет уравнению
fy °l
10 у,
W(0)0.
Формирователь 5 функции чувствительности состоит из интеграторов 27 - 30, на выходе которых получаются соот- ветственно функции Wn .W.W, и Wn, из четырех блоков формирования правых частей системы (и;,, и)3, wj . Формирователь со, состоит из умножителя 31, один вход которого соединен с выходом интегратора 27, а другой вход - с отдельным выходом блока 6 памяти, из умножителя 32, один вход которого соеди55
0
5
0
5
5
0
нен с выходом блока 7 постоянной памяти, а другой - с выходом интегратора 29, из сумматора 33, три входа которого соединяются с выходом умножителя 31, выходом умножителя 32 и отдельным выходом подстраиваемой модели 3« Выход сумматора 33 соединен с входом интегратора 27 через нормально замкнутый контакт j4 реле 35.
Формирователь Uj состоит из умножителей 3& и 37 и сумматора 38. Один вход умножителя 36 соединен с выходом блока 6, другой вход - с выходом интегратора 28. Один вход умножителя 37 соединен с выходом блока 7 постоянной памяти, другой вход - с выходом интегратора 30. Оба выхода умножителей 36 и 37 соединены с входами сумматора 38, выход которого соединен с входом интегратора 28 через нормально замкнутый контакт 39 реле 35. Формирователь и)3 состоит из умножителей 0 и 1 и сумматора k2. Одни входы умножителей 0 и М соединены с выходами блоков 6 и 7 соответственно, другие входы - с выходами интеграторов 27 и 28 соответственно. Выходы умножителей 0 и k соединены с входами сумматора 2, выход которого соединен с входом интегратора 29 через нормально замкнутый контакт 3 реле 35. Формирователь (о4 состоит из умножителей Ц1 и 5 и сумматора 6. Одни входы умножителей ЦЦ и Ь соединены с выходами блоков 6 и 7, другие входы - с выходами интегратора 28 и 30 соответственно. Выходы умножителем kb и 5 подаются на два входа сумматора 6, третий вход которого соединен с отдельным выходом подстраиваемой модели. Выход сумматора 6 соединен с входом интегратора 30 через нормально замкнутый контакт 7 реле 35.
Вычислитель Ц параметров (фиг.) реализует формирование алгебраических систем 9 и ее решение, а также получение нового значения параметров 9, и состоит из блока 8, реализующего матричное произведение SW, блока 9, реализующего операцию матричного транспортирования (sw)r, блока 50, реализующего операцию матричного умножения (SW)TSW, блока 51, реализующего операцию матричного интегриро- 5 вания J(SW)TSWd, блока 52, реализующего операцию матричного умножения Sy, блока 53, реализующего операцию матричного вычитания z-Sy, блока 5,
0
0
5
реализующего операцию матричного умножения (SW) (z-Sy), блока 55, реализующего операцию матричного интегрирования I(SW)r (z-Sy)off, блока 56, реализующего решение алгебраической системы (7), блока 57, реализующего операцию матричного сложения 6 + /5в«
Первый вход блока 48 умножения соединен с отдельным выходом блока 7 по стоянной памяти, второй вход - с выходом формирователя 5 функции чувствительности. Выход блока 48 соединен с входом блока 49 и вторым входом бло ка 50 умножения, первый вход которого соединен с выходом блока 49. Выход блока 50 соединен с входом блока 51 через нормально замкнутый контакт 58 реле 59, выход блока 51 соединен с от дельным входом блока 56. Первый вход блока 52 соединен с отдельным выходом блока 7 памяти, другой вход блока 52 соединен с выходом блока 3. Выход бло ка 52 соединен с первым входом блока 53, втором вход которого соединен с выходом блока 2. Выход блока 53 сое динен с вторым входом блока 54, первый вход которого соединен с выходом блока 49. Выход блока 54 соединен с входом блока 55 через нормально замкнутый контакт 60 реле 59, выход блока 55 - с отдельным входом блока 56, выход которого соединен с одним из входов блока 57, вторым входом соединенного с выходом блока 6. С выхода блока 57 вектор параметров в через ключ поступает в блок 6 аналоговой памяти. С выхода блока 57 вектор приращения параметров Д0 поступает в блок задания начальных условий и блок 6 аналоговой памяти.
Блок 8 формирования начальных уело вий (фиг. 5) состоит из матричного ум ножителя 61, на первый вход которого подается W с выхода формирователя 5 функций чувствительности, а на второй вход -Дб с отдельного выхода вычислителя 4 параметров. Выход умножителя 61 соединен с одним из входов матричного сумматора 62, другой вход которого соединен с выходом подстраиваемой модели 3 через последовательно соединенные нормально разомкнутый кон такт 63 реле 64 и запоминающий элемент 65, построенный на основе интегрирующего усилителя. На выходе сумматора 62 получается новое начальное условие y(t-)+Wa0, которое подается на ключ 14.
0
5
0
5
0
5
0
5
0
5
Блок 48 (фиг. 6) для случая матрицы наблюдения S в виде вектор-строки 8(5„,5,г) состоит из умножителей 66- 69 и сумматоров 70 и 71. Первые входы умножителей 66-69 соединены с блоком постоянной памяти, вторые входы умно- (жителей - с выходами интеграторов 27 - 30 соответственно. Выходы умножителей 66 и 67 соединены с входами сумматора 70. Выходы умножителей 68 и 69 соединены с входами сумматора 71. На входе сумматора 70 получается первая компонента вектора произведения SW, a на выходе сумматора 71 - вторая.
Блок 56 (фиг. 7) состоит из трех формирователей, на выходе которых получают определители и, й и jj, a также двух делителей. Первый формирователь состоит из умножителей 72 и 73 и блока 74, реализующего операцию вычита ния. Так как блок 51 реализует матрицу алгебраической системы ф, то на четырех отдельных выходах этого блока получают
„, Ф,7 Ф7)и Фаг Блок 55 реализует правую часть алгебраической системы F, поэтому на двух отдельных выходах получают F и F . Два входа умножителя 72 соединены с отдельными выходами блока 51 („,,;), два входа умножителя 73 соединены с другими двумя отдельными выходами блока 51 ( Ф,). Первый вход блока 74 соединен с выходом умножителя 72, второй вход - с выходом блока 73. Второй формирователь, реализующий л, , состоит из умножителей 75 и 76 и блока 77 вычитания. Два входа умножителя 75 соединены с отдельными выходами блоков 51 и 55 ( F,), два входа умножителя 76 - с другими отдельными выходами блоков 51 и 55 (if)- Выходы умножителей 75 и 76 соединены с первым и вторым вхо,ами блока 77. Третий формирователь, реализующий dlt состоит из умножителей 78 и 79 и блока 80 вычитания. Два входа умножителя 78 соединены с двумя выходами блоков 51 и 55 (Фц , F), два входа умножителя 79 - с другими выходами блоков 51 и 55 (Ф,, F,) Выходы умножителей 78 и 79 соединены с первым и вторым входами блока 80 вычитания. Первые входы блоков 81 и 82 деления соединены с выходами блоков 77 и 80 соответственно, а вторые выходы блоков деления 81 и 82 - с выходами блока 74 вычитания. На выходах блоков 81 и 82 деления получают решение алгебраической системы Д0, и дбг.
Ј
9,
Синхронизатор 11 (фиг. 8), на выхо- пает де которого получают четыре управляюмоде
20
щих импульса S.,-S4, состоит из одно- вибратора 83, схемы ИЛИ §1, генератора 85 тактовых импульсов (ГТИ), линий 86 и задержки, схемы ИЛИ 88. Одно- вибратор запускается от кнопки 89 Eh. Выход одновибратора 83 соединен с одним входом схемы ИЛИ 84, второй вход JQ которой соединен с выходом порогового блока 10. Выход схемы ИЛИ 84 соединен с управляющим входом ГТИ 65. ГТИ вырабатывает импульс St, поступающий на линию 86 задержки, с выхода которой | получают импульс 5г, поступающий на вход линии 87 задержки. С выхода линии 87 задержки получают импульс S3 . Схема ИЛИ 88 имеет три входа, первый из которых соединен с выходом ГТИ 85, второй - с выходом линии 86, третий - с выходом линии 87 задержки. На выходе схемы 88 получают импульс S4.
Система работает следующим образом.25
До начала работы (запуска ГТИ) задается исходное состояние устройства. В блоке 6 аналоговой памяти устанавливается начальное значение вектора параметров 0е, которое известно из физической постановки задачи, нулевое значение &Q. В блок 7 постоянной памяти записывается матрица наблюдения S, известные элементы матрицы А, нулевая константа. На интеграторах 16 и 17 устанавливаются начальные условия У-,(0), у7(0) из физической постановки задачи. На интеграторах 27 - 30, 51 и 55 устанавливаются нулевые начальные условия. В пороговом элементе устанавливается значение Ј.
В момент tj появляются два управляющих импульса S, и S4 . По импульсу S4 нормально замкнутые контакты 18
30
35
40
y(t-) с выхода подстраиваемой модели. Одновременно на выходе блока 8 новое начальное условие
получают
y(t. )y(t.)+W(t .)ле(с j). С приходом импульса S2 полученное новое начальное условие y (ti) через ключ 14 задается на интеграторах 16 и 17. При появлении импульса S5 нулевая константа через ключ 12 подается на отдельные входы интеграторов 27-30 блока 5 и интеграторы 51 и 55 блока 4. С окончанием импульса S4 нормально замкнутые контакты 18 и 19 реле 20, контакты 34,39,43 и 47 реле 35 и контакты 58 и 60 реле 59 замыкаются, в результате чего входы интеграторов подключаются и начинается процесс интегрирования до прихода следующих тактовых импульсов ST и S4.
В течение интервала t,+3f,t -+, происходит интегрирование уравнений (3) и (5), формирование алгебраической системы (7). На выходах интеграторов 16 и 17 подстраиваемой модели 3 реализуется решение системы (3), на выходах интеграторов 27-30 формирователя 5 - функции чувствительности, на выходе блока 51 - матрица алгебраической системы Ф, а на выходе блока 55 - вектор правых частей алгебраической системы (7). В вычислителе 9 реализуется || д6II . Полученная норма К и 6 2 подается на пороговый блок 10. Если (I ДбК , то на выходе блока 10 появляется отрицательный импульс, который отключает генератор тактовых импульсов. В противном случае схема продолжает работать.
Технические преимущества изобретения заключаются в том, что оно применимо для идентификации параметров объектов как с полной, так и с неполной информацией о состоянии объекта в оти 19 реле 20, контакты 34, 39 и 47 ре- Д5 личие от известной системы, для реалиле 35, контакты 58 и 60 реле 59 во входных цепях интеграторов 16,17, 27- 30, 51 и 55 размыкаются, благодаря чему достигается фиксация решений y(t;), W(t;), F(t;), 4(t;). В этот же момент t, на выходе блока 56 получают решение алгебраической системы ив, которое через ключ 15 записывается в блоке 6, одновременно происходит запись нового значения 6 в блок 6 через ключ 13. С приходом управляющего импульса Sv нормально разомкнутый контакт 63 реле замыкается и на вход запоминающего элемента 65 посту55
зации алгоритма идентификации которой требуется измерение всего вектора состояния.
Формула изобретения
Система идентификации параметров линейных объектов, содержащая блок задания начальных условий, попарно- последовательно соединенные объект идентификации и блок датчиков состояния объекта, подстраиваемую модель и вычислитель параметров, блок вычисления критерия идентификации и порото29
пает
0
Q
5
0
5
0
10
y(t-) с выхода подстраиваемой модели. Одновременно на выходе блока 8 новое начальное условие
получают
y(t. )y(t.)+W(t .)ле(с j). С приходом импульса S2 полученное новое начальное условие y (ti) через ключ 14 задается на интеграторах 16 и 17. При появлении импульса S5 нулевая константа через ключ 12 подается на отдельные входы интеграторов 27-30 блока 5 и интеграторы 51 и 55 блока 4. С окончанием импульса S4 нормально замкнутые контакты 18 и 19 реле 20, контакты 34,39,43 и 47 реле 35 и контакты 58 и 60 реле 59 замыкаются, в результате чего входы интеграторов подключаются и начинается процесс интегрирования до прихода следующих тактовых импульсов ST и S4.
В течение интервала t,+3f,t -+, происходит интегрирование уравнений (3) и (5), формирование алгебраической системы (7). На выходах интеграторов 16 и 17 подстраиваемой модели 3 реализуется решение системы (3), на выходах интеграторов 27-30 формирователя 5 - функции чувствительности, на выходе блока 51 - матрица алгебраической системы Ф, а на выходе блока 55 - вектор правых частей алгебраической системы (7). В вычислителе 9 реализуется || д6II . Полученная норма К и 6 2 подается на пороговый блок 10. Если (I ДбК , то на выходе блока 10 появляется отрицательный импульс, который отключает генератор тактовых импульсов. В противном случае схема продолжает работать.
Технические преимущества изобретения заключаются в том, что оно применимо для идентификации параметров объектов как с полной, так и с неполной информацией о состоянии объекта в от5 личие от известной системы, для реали
зации алгоритма идентификации которой требуется измерение всего вектора состояния.
Формула изобретения
Система идентификации параметров линейных объектов, содержащая блок задания начальных условий, попарно- последовательно соединенные объект идентификации и блок датчиков состояния объекта, подстраиваемую модель и вычислитель параметров, блок вычисления критерия идентификации и порото10
вый блок, отличающаяся тем, что, с целью расширения функциональных возможностей за счет обеспечения, работоспособности системы идентификации объекта с неполной информацией по вектору состояния, в него введены формирователь функции чувствительности, блок аналоговой памяти, блок постоянной памяти, синхронизатор и четыре ключа, первый из которых информационным входом подключен к первому выходу блока постоянной памяти, а выходом подключен к второму входу вычислителя параметров и первому вхо- j5 ду формирователя функции чувствительности, подключенного вторым входом, объединенным с первым входом блока задания начальных условий, к выходу подстраиваемой модели, а выходом - к тьему входу вычислителя параметров и второму входу блока задания начальных условий, второй ключ информационным входом, объединенным с третьим входом
ловии, а выходом к управляющему входу подстраиваемой модели, подключенной информационным входом, объединенным с четвертым входом вычислителя параметров, к второму выходу блока аналоговой памяти, четвертый ключ подключен информационным входом к второму выходу вычислителя параметров, а выходом к второму входу блока аналоговой памяти, вычислитель параметров пятым входом подключен к выходу блока датчиков, шестым - к второму выходу блока постоянной памяти, пороговый блок выходом подключен к входу синхронизатора, подключенного.первым выходом к управ-, ляющим входам второго и четвертого ключей и входу синхронизации блока задания начальных условий, вторым - к управляющему входу третьего ключа, третьим - к управляющему входу первого ключа и четвертом - к синхронизирующим входам вычислителя параметров, подстраиваемой модели, формироваблока задания начальных условий, под- 25 теля функции чувствительности, третий
выход блока постоянной памяти соединен с вторым управляющим входом подстраиваемой модели и с третьим входом формирователя функции чувствительности, подключенного четвертым входом к второму выходу блока аналоговой памяти.
ключей к первому выходу вычислителя параметров, а выходом - к первому входу блока аналоговой памяти, первым выходом подключенного к блоку вычисления критерия идентификации, третий ключ подключен информационным вхол ,м к выходу блока задания начальны. %с
д
ловии, а выходом к управляющему входу подстраиваемой модели, подключенной информационным входом, объединенным с четвертым входом вычислителя параметров, к второму выходу блока аналоговой памяти, четвертый ключ подключен информационным входом к второму выходу вычислителя параметров, а выходом к второму входу блока аналоговой памяти, вычислитель параметров пятым входом подключен к выходу блока датчиков, шестым - к второму выходу блока постоянной памяти, пороговый блок выходом подключен к входу синхронизатора, подключенного.первым выходом к управ-, ляющим входам второго и четвертого ключей и входу синхронизации блока задания начальных условий, вторым - к управляющему входу третьего ключа, третьим - к управляющему входу первого ключа и четвертом - к синхронизирующим входам вычислителя параметров, подстраиваемой модели, формирователя функции чувствительности, третий
выход блока постоянной памяти соединен с вторым управляющим входом подстраиваемой модели и с третьим входом формирователя функции чувствительности, подключенного четвертым входом к второму выходу блока аналоговой памяти.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров объекта | 1983 |
|
SU1156001A1 |
| СИСТЕМА ГОЛОСОВОЙ ИДЕНТИФИКАЦИИ ДИКТОРА | 2009 |
|
RU2385272C1 |
| ПАССИВНАЯ ПЕЛЕНГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2298803C2 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Перестраиваемый цифровой фильтр с программируемой структурой | 2016 |
|
RU2631976C2 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2107394C1 |
| Способ регулирования мощности емкостной компенсации в тяговой сети | 1987 |
|
SU1504723A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ УСЛОВНОГО ВРЕМЕНИ СГОРАНИЯ МАССЫ РАЗГОННОГО БЛОКА | 2001 |
|
RU2209158C1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |

Изобретение относится к системам автоматического управления и позволяет обеспечить идентификацию объектов с неполной информацией по вектору состояния. Система содержит блок 2 датчиков состояния, подключенных к объекту 1, подстраиваемую модель 3, вычислитель 4 параметров, формирователь 5 функции чувствительности с подключенными блоком 6 аналоговой памяти и блоком 7 постоянной памяти, блок задания 8 начальных условий, последовательно соединенные вычислитель 9 критерия идентификации и пороговый блок 10, синхронизатор 11, четыре ключа 12, 13, 14, 15. 8 ил.
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система индентификации параметров объекта | 1977 |
|
SU703779A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
