1
(61) 1379755
(21)4621940/21,
(22)19.02.88
(46) 30.10.91. Бюл. № 40 (72) С.В. Черный, В.Н. Победа и С.А. Радионов
(53)621.317.44 (U88.8)
(56)Авторское свидетельство СССР № 1379755, кл. G 01 R 33/02, 1985.
(54)МАГНИТНО-ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬ
(57)Изобретение относится к измерительной технике, а именно к устройствам, предназначенным для одновременного измерения магнитных полей, воздействующих на объект, и координат его местоположения в пространстве, может быть использовано для навигации по магнитному полю Земли. Целью изобретения является расширение функциональных возможностей измерителя за счет одновременного измерения индукции магнитного поля и координат местоположения измерителя. Она достигается за счет того, что устройство снабжено дополнительным преобразовательным блоком 4-2, воспринимающим элементом 1-2, модулятором 2-2, алгебраическими сумматорами 7-2, 8-2, 9-2, умножителями 10-2, 11-2, 12-2, , интегратором 16-2, задатчиком постоянного напряжения и образования новых функциональных связей. Кроме того, устройство содержит аналогичный преобразовательный блок 4-1. 3 ил.
(Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитно-инерциальный измеритель | 1985 |
|
SU1379755A1 |
| Измеритель производных магнитных полей | 1989 |
|
SU1670635A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| Устройство для измерения угловых деформаций объекта | 1986 |
|
SU1408206A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| Устройство для измерения вектора магнитной индукции | 1977 |
|
SU687424A1 |
Изобретение относится к измерительной технике, а именно к устройствам, предназначенным для одновременного измерения магнитных полей, воздействующих на объект, и координат его местоположения в пространстве) может быть использован для навигации по магнитному полю Земли.
Целью изобретения является расширение функциональных возможностей измерителя за счет одновременного измерения индукции магнитного поля и координат местоположения измерителя.
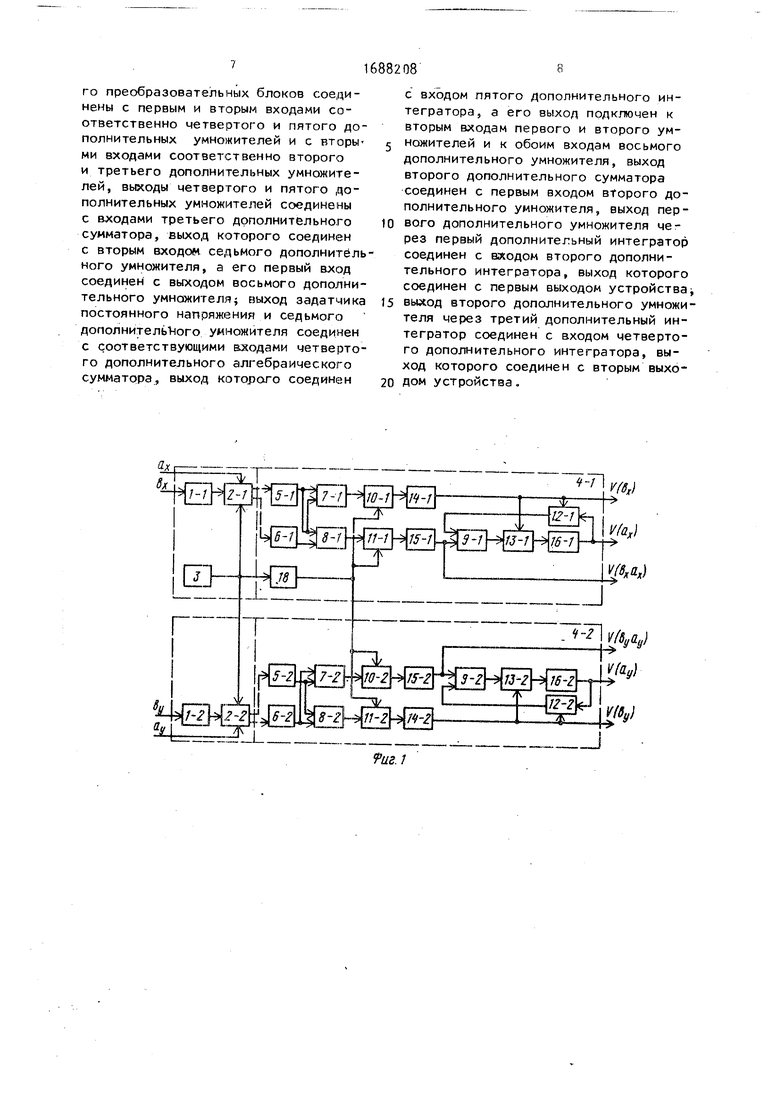
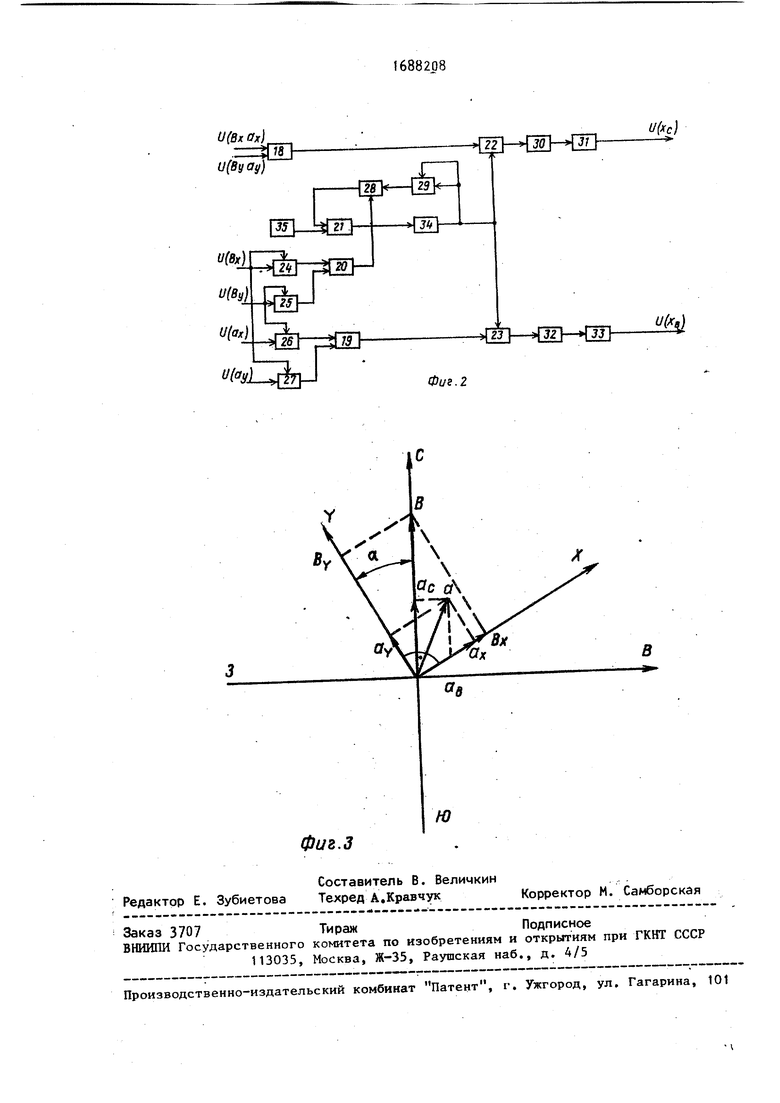
На фиг.1 и 2 изображена структурная схема магнитно-инерциального измерителя; на фиг.З - схема ориентации осей датчиков.
Магнитно-инерциальный измеритель содержит воспринимающие элементы 1-1, 1-2, модуляторы 2-1, 2-2, генератор 3, преобразовательные блоки 4-1, 4j2, индукционные катушки 5-1, 5-2, 6-1, 6-2, алгебраические сумматоры 7-1, 7-2, 8-1, 8-2, 9-1, 9-2, умножители HIM. 10-2, 11-1, 11-2, 12-1, 12-2, 13-1, , апериодические фильтры 14-1, 14-2,, 15-1, 15-2, интеграторы 16-1, 16-2, фазовращатель 1/-1, ал- ,гебраические сумматоры 18-21, умножители 22-29, интеграторы 30-34 и задатчик постоянного напряжения 35,
Причем выходы апериодических фильтров 15-1 и каналов измерения ускорений измерителей 4-1 и 4-2
О
оо оо ю
о
00
N2
соединены с входами сумматора 18, выход которого соединен с первым входом первого умножит ля 22, выходы каналов измерения ускорений изме- рителей 4 - 1 и 4 2, являющиеся выходами интеграторов 16-1 и 16-2 соединены с первыми входами соответственно умножителей 26 и 27,выходы которых соединены с входами алгебра - ического сумматора 19.
Выходы каналов намерения составляющих индукции магнитного поля, являющиеся выходами фильтров 14-1 и 14-2, соединены с первым и вторым входами соответственно умножителей 2k, 25 и с вторыми выходами соответственно умножителей 26 и 27.
Выходы умножителей 24 и 25 соединены со входами сумматоре 20, выход которого соединен с вторым входом умножителя 28,первый вход которого соединен с выходом умножителя 29. Выход задатчика постоянного напряжения 35 и умножителя 28 соединены с соответствующими входами алгебраического сумматора 21 выход которого соединен с входом интегратора 34, выход которого соединен с вторыми входами умножителей 22 и 23„ а также с обоими входами умножитепя 29,
Выход сумматора 19 соединен с первым, входом умножитепя 23.-Выход умножителя 22 через первый интегратор 30 соединен с входом интегратора 31, выход которого является выходом одно из прямоугольных координат местоположения измерителя. Выход умножителв 23 через интегратор 32 соединен р входом интегратора 33, выход которог является выходом другой прямоугольной координаты измерителя.
Основной и дополнительный измерители 4-1 и 4-2 установлены на стабилизируемой в плоскости горизонта платформе тгзк, что оси их чувствительности взаимно перпендикулярны.
Магнитно-инерциальный измеритель работает следующим образом.
Ось чувствительности Y основного измерителя 4-1 направлена, в общем случае, под некоторым углом оЈ к направлению на северный магнитный полюс Земли (фиг.З). В силу взаимной перпендикулярности осей измерителей 4-1 и 4-2, ось X дополнительного измерителя 4-2 образует угол обе линией, указывающей направление Восток Запад.
10
15
Работа каждого из измерителей 4-1 и 4-2 происходит в полном соответствии с работой основного изобретения по а.с. № 1379755. В результате на выходах фильтров 14-1 и 14-2 формируются сигналы, пропорциональные проекциям вектора магнитного поля В на оси чувствительности измерителей 4-1 и 4-2 соответственно U(BX) и U(Bu). При перемещении измерителя с ускорением а на выходах интеграторов 16-1 и 16-2 формируются сигналы, пропорциональные проекциям вектора а на оси измерителей 4-1 и 4-2, соответственно U(ax) и и(ац). При этом на выходах апериодических фильтров и формируются сигналы пропорциональные Вхах и B(, соответ- 2о ственно ) и U(Buau).
Все перечисленные выше сигналы используются в элементах 18-35 маг- нитно-инерциального измерителя для вычисления составляющих ускорения измерителя по осям Север-Юг и Восток- Запад и в дальнейшем - для определения координат местоположения измерителя относительно исходной точки в системе координат Север-Юг, Восток- Запад. Это осуществляется в измерителе следующим образом.
Связь выходных сигналов измерителей 4-1 и 4-2 с вектором магнитного поля Земли В и ускорением а описывается следующей системой уравнений
25
30
35
(1)
а ал - северная и восточная составляющие ускорения маг- нитно-инерциального измерителя;
составляющие индукции магнитного поля Земли, измеряемые измерителями 4-1 и 4-2.
Тригонометрические функции угла оЈ определяются следующими соотношениями
вхв
В
--К
+ в
21
(2)
COSftS Вх
№
+ в:
Учитывая соотношения (2), уравнения для составляющих ускорения системы (1) можно представить в виде
с ( -а)(Вх +Вр
,
5 (3)
(
+ а ВХ)В +В2) о о
В силу этого выходное напряжение инвертора 31 - U. пропорционально
смещению Хс измерителя по линии на Север-Юг, а выходное напряжение инРешение системы (3), осуществляется в процессе работы блоков 18-35.
При этом умножители 2, 25 и сум- 15 вертора 33 U 3пропорционально смещению измерителя от исходного состояния по пинии Восток-Запад.
матор 20 формируют сигнал U20, пропорциональный Ви.
Задатчик 35, сумматор 21, умножители 28, 29 и интегратор 3 формируют на выходе интегратора 3 сигнал1, пропорциональный (вЈ + Вц)2.
Происходит это следующим образом.
Выходное напряжение блока интегратора 3 и описывается следующими уравнениями:
20
Формула изобретения
Магнитно-инерциальный измеритель по а.с. № 1379755, отличающийся тем, что, с целью расширения функциональных возможностей
25 путем одновременного измерения индукции магнитного поля и координат местоположения измерителя, снабжен аналогичным дополнительным преобразовательным блоком,, возбуждаемым от
U
34
(U 5-U2&
)
U28 U2o U2
и„„ и
(4)
J29 UH Т34 период интегрирования. Подставляя последние два уравнения системы СО в первое, имеем:
U}4 из5-и2о
Если Ua и U20 имеют одинаковые знаки, что легко реализуется, т.к. . 1)зф const (напряжение задатчика), a + Bu величина знакопостоянная, то уравнение (5) имеет устойчивую точку, для которой 0. Из этого следует, что в процессе работы рассматриваемых блоков напряже- ние 113ф устанавливается на значении, определяемом следующим соотношением:
U.
- и.
и.
3 U2o U34- этого следует, что
О,
U
34
Таким образом, соотношение (7) At. казывает пропорциональность величин U
J4
и (Bf + BjV1 2.
Г
882П86
В силу этого сумматор 18 и чик 35 формируют сигнал U2Z , пропорциональной величине ас, а умножители 5 26, 27, 23 и сумматор 19 - сигналIU}J пропорциональны а. Сигналы, пропорциональные ас и аь, преобразуются в инверторах соответственно 3, 31 и 32,33 путем двукратного интегрирова- 10 по времени.
В силу этого выходное напряжение инвертора 31 - U. пропорционально
смещению Хс измерителя по линии на Север-Юг, а выходное напряжение ин15 вертора 33 U 3пропорционально смещению измерителя от исходного состояния по пинии Восток-Запад.
20
Формула изобретения
Магнитно-инерциальный измеритель по а.с. № 1379755, отличающийся тем, что, с целью расширения функциональных возможностей
25 путем одновременного измерения индукции магнитного поля и координат местоположения измерителя, снабжен аналогичным дополнительным преобразовательным блоком,, возбуждаемым от
30 генератора и фазовращателя основного, с осью чувствительности, направленной перпендикулярно оси основного магнитно-инерциального измерителя, воспринимающим элементом, модулято35 РОМ, четырьмя дополнительными алгебраическими сумматорами, восемью дополнительными умножителями, пятью дополнительными интеграторами и за- датчиком постоянного напряжения, при40 чем основной и дополнительный воспринимающие элементы установлены на платформе, стабилизируемой в плоскости горизонта., выходы апериодических фильтров каналов измерения уско45 рений каждогоиз преобразовательных блоков соединены с входами первого дополнительного сумматора, выход которого соединен с первым входом первого дополнительного умножителя, вы50 ходы каналов измерения ускорений основного и дополнительного преобразовательных блоков соединены с первыми входами соответственно второго и третьего дополнительных умножителей,
55 выходы которых соединены с входами второго дополнительного алгебраического сумматора, выходы каналов измерения составляющих индукции магнитного пОля основного и дополнительного преобразовательных блоков соединены с первым и вторым входами соответственно четвертого и пятого дополнительных умножителей и с вторы- ми входами соответственно второго и третьего дополнительных умножителей, выходы четвертого и пятого дополнительных умножителей соединены с аходами третьего дополнительного сумматора, выход которого соединен с вторым входом седьмого дополнительного умножителя, а его первый аход соединен с выходом восьмого дополнительного умножителя; выход задатмика постоянного напряжения и седьмого дополнительного умножителя соединен с соответствующими входами четвертого дополнительного алгебраического сумматора, выход которого соединен
ах ,
с входом пятого дополнительного интегратора, а его выход подключен к вторым входам первого и второго умножителей и к обоим входам восьмого дополнительного умножителя, выход второго дополнительного сумматора соединен с первым входом второго дополнительного умножителя, выход первого дополнительного умножителя через первый дополнительный интегратор соединен с входом второго дополнительного интегратора, выход которого соединен с первым выходом устройства,
выход второго дополнительного умножителя через третий дополнительный интегратор соединен с входом четвертого дополнительного интегратора, выход которого соединен с вторым выхоДом устройства„
%W
Ufa a,}
Фиг.З
Фиг. 2
