Изобретение относится к проходке подземных выработок щитовым способом.
Целью изобретения является повышение надежности определения положения проходческого щитового комплекса в процессе проходки на каждый шаг передвижения щита.
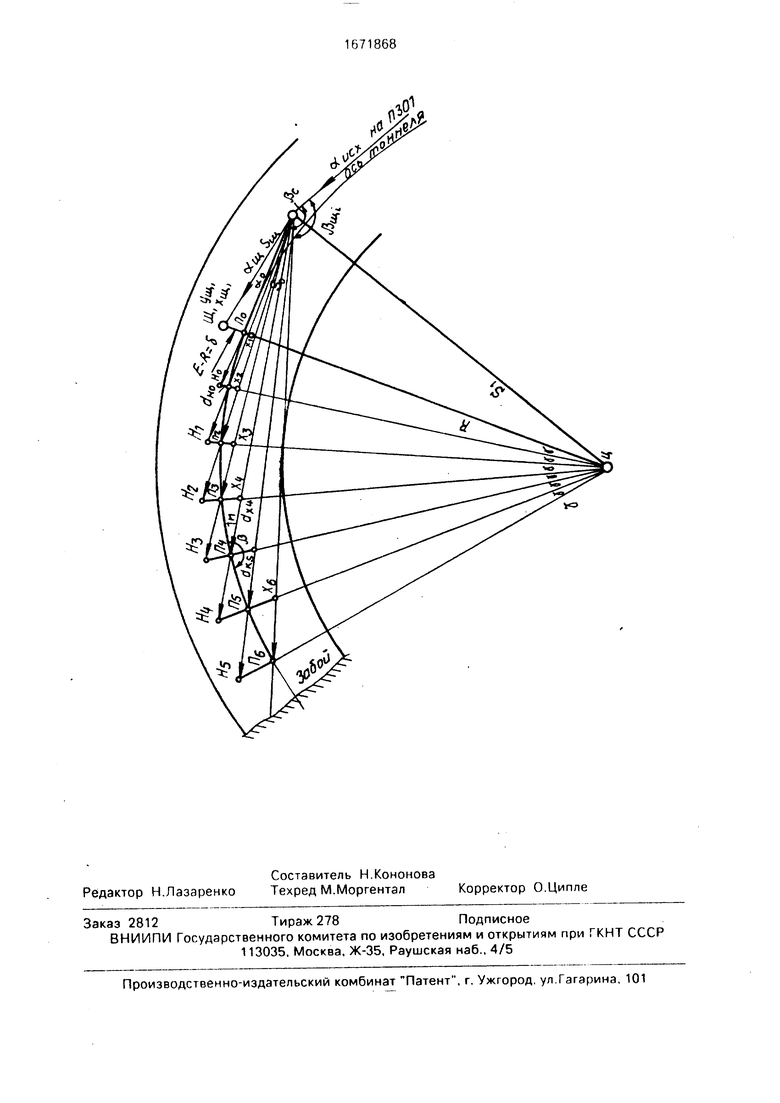
На чертеже схематически изображен участок кривой трассы сооружаемого тоннеля, вид в плане.
Данный способ осуществляется следующим образом
Перед проходкой щитовой комплекс монтируют на щитовой камере, расположенной на участке круговой кривой радиусом проектной оси тоннеля R, проходящим через центр Ц Примерно в середине оболочки щита, на удобном и свободном месте, приваривают металлический столик для инструмента с центром НИ К концу комплекса
подтягивают пространственную полигоно- метрию по точности основной подземной. Последний знак основы обозначают буквой d. Выполняют непосредственно измерение длины участка Ci-Ш i и определяют угол при Ci-/. Затем вычисляют все параметры треугольника Ц CiLUi, которые обозначены следующим образом: CiLUi ащ, UCi 81, ЦШ Е, и определяют координаты точек ИМХщ и Ущ. Получив значение Е, находят разность E-R и получают новую проектную точку П0 (порядковый номер продвижки щита). Затем решают треугольник CiLUin0 и вычисляют окончательные проектные параметры YO.XO, пь. So./30 и Пк П0.
После этого по проектной кривой оси тоннеля от точки П0 откладывают расстояния, равные шагу полной продвижки щита П1,П2,ПзПк. Проводят из центра Ц проектной кривой оси тоннеля через пункты П1,П2.ПзПк радиусы. Определяют центральный угол у по формуле
siny
J R
О)
где I - длина линии щитовой полигономет- рии;
R - радиус кривой проектной оси тоннеля.
После этого определяют угол поворота центра щита на каждый шаг продвижки/ по формуле
180°00 00 - arc siny.
(2)
Затем вычисляют координаты пунктов П1,П2.ПзПк, контроль которых осуществляют примыканием хода к центру кривой по формуле
Y4 sln() R + YK; Xu cos(OK+/3)-R + Хк.
(3)
Далее определяют невязки в координатах и их распределение. Величина невязки зависит от точности определения центрадь- ного угла у. Появляются невязки в координатах в результате примыкания хода к центру круговой кривой и разбрасываются с обратным знаком непосредственно в координаты точек .
Увязав ход щитовой полигонометрии и имея проектные координаты пунктов
П1,П2,ПзПк центра щита на каждую продвижку, определяют положение продольной оси щита по отношению к трассе тоннеля, т.е. опредепяют положение ножа и
хвоста щита. Для этого из пункта пространственной полигонометрии Ci проводят прямую, проходящую через пункт П1 до пересения ее с последующим радиусом,
проходящим через пункт П2 в точке Hi (положение ножа, продвижка №. 1). Так как эта прямая, проходящая через пункт П-i пересекает предыдущий радиус, го получаем точку пересечения с данным радиусом Xi (положе0 ние хвоста, продвижка № 1). Точно также из пункта пространственной полигонометрии Ci проводят прямые через все пункты
П-|.П2,ПзПк центров щита на каждый шаг
продвижки. На каждой прямой обозначают
5 точки Hi и Xi, обозначающие положения ножа и хвоста щита на каждый шаг продвижки. Поскольку точки ножа щита Hi и хвоста щита Х| находятся на одной прямой с точками центра щита Г, то в результате решения
0 обратных геодезических задач получают ди- рекционные углы Hi-Hi и ПгХ|
Длину каждого участка П|-Н( или П|-Х| принимают равной шагу продвижки щита, например 1 м. Так как удлинение линии
5 П|-Н| относительно стороны щитовой полигонометрии составляет не более 2 мм, а линии П|-Х| и того меньше, то эта разность для нахождения координат Hi и X, не имеет практического значения, поэтому, пренеб0 регая этой разностью, вычисляют координаты точек ножа Hi (Hi, H2, НзНк) и хвоста
Xi (Xi, X2, Хз Хк) щита, т.е определяют
проектное удаление этих точек от оси тоннеля вдоль направления соответствующего
5 радиуса проектной кривой оси тоннеля на каждый шаг продвижки.
При продвижении горнопроходческого щитового комплекса по трассе тоннеля проектное удаление точек нож-Н, и хвост-Xi
О щита от оси тоннеля сравнивают с фактическим, определяемым по передней и задней горизонтальным мерным рейкам в соответствующих точках. При этом горизонтальные мерные рейки располагают на щитовом ком5 плексе под углом друг к другу, равным центральному углу у, и с возможностью перемещения их вдоль радиусов, на которых они расположены Это дает возможность увеличить длину проходки щитового
0 комплекса с одного помоста.
В результате сравнения проектного удаления точек ножа и хвоста щита относительно проектной оси тоннеля с фактическим производится коррекция оси орнопроход5 ческого щитового комплекса.
При ведении проходки по кривой трассе при сооружении тоннеля предлагаемым методом значительно повышается надежность управления положением щи га R плане благодаря тому, что визирный пум зрительной
трубы теодолита всегда направлен на проектную точку нахождения центра щита, что дает возможность проконтролировать даже назначительный разворот оси горнопроходческого щитового комплекса, имея заранее определенный щитовой угол. Уже перед очередной продвижкой всегда заранее известно, на включение какого домкрата необходимо подать команду.
Благодаря также наличию заранее рассчитанных проектных координат ножа и хвоста щита на каждый щитовой угол соответствующего шага продвижки горнопроходческого щитового комплекса легко можно проконтролировать и, при необходимости, откорректировать фактическое положение щитового комплекса в плане.
Кроме того, данный способ управнения продвижением горнопроходческого щитового комплекса по кривой трассе позволяет увеличить длину проходки с одного помоста в три раза, так как, все пункты пространственной полигонометрии определены заранее, что дает возможность сместить центр щита в сторону наружу от проектной оси тоннеля на необходимое расстояние. Это смещение, как постоянную величину, прибавляют к имеющимся проектным расчетам координат всех точек (центр щита, нож и хвост щита). В соответствии с этим сокращается количество разборок и установок помо- ста, а следовательно, сокращаются трудозатраты и стоимость проходческих работ.
Формула изобретения Способ определения положения проходческого щитового комплекса при прохождении его на кривых участках трассы.
заключающийся в переносе в натуру мате-- риальных точек, заданных координатами, включающий установку в рабочее положение указателя направления проходки по заранее определенной прямой в произвольно выбранной точке пространства, прямоугольные координаты которой определяют о заранее выбранной условной системе координат, и установку на пути этой прямой горизонтальных мерных реек, по которым контролируют расположение материальных точек в соответствии с заданными координатами в этой же системе координат, отличающийся тем, что, с целью повышения
надежности определения положения щита в плане в процессе проходки на каждый шаг передвижения щита, перед проходкой заранее определяют в плане проектные точки нахождения центра щита, представляющие собой точки пересечения радиуса проектной кривой оси тоннеля с прямой направления проходки, на каждый шаг передвижки щита, находят угол поворота центра щита на каждый шаг передвижки и в
соответствии с ним определяют соответствующие координаты двух точек, расположенных по разные стороны относительно проектной кривой оси тоннеля, одна из которых является точкой пересечения ножа щита с продолжением радиуса проектной кривой оси тоннеля, проходящего через последующий проектный центр щита и совпадающего с направлением передней мерной рейки, а другая является
точкой пересечения хвоста щита с радиу- сом проектной оси тоннеля, проходящим через предыдущий центр щита и совпадающим с направлением задней мерной рейки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| МЕХАНИЗИРОВАННЫЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ СО СБОРНОЙ ОБЖАТОЙ В ПОРОДУ ОБДЕЛКОЙ | 1988 |
|
RU2018677C1 |
| Устройство управления движением проходческого щита | 1980 |
|
SU949188A1 |
| ОВАЛЬНЫЙ ТЕЛЕСКОПИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН ПРОХОДЧЕСКОГО ЩИТА | 2010 |
|
RU2439327C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1973 |
|
SU388196A1 |
| СПОСОБ СООРУЖЕНИЯ НОВЫХ ПЕРЕГОННЫХ ТОННЕЛЕЙ, СОЕДИНЯЮЩИХ ДВЕ СОСЕДНИЕ СТАНЦИИ МЕТРОПОЛИТЕНА ГЛУБОКОГО ЗАЛОЖЕНИЯ ПОСЛЕ КАТАСТРОФЫ С ЗАТОПЛЕНИЕМ СТАРЫХ ТОННЕЛЕЙ | 1998 |
|
RU2164983C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2197616C1 |
| Проходческий щит | 1984 |
|
SU1361332A1 |
| СПОСОБ СООРУЖЕНИЯ НОВЫХ ПЕРЕГОННЫХ ТОННЕЛЕЙ ГЛУБОКОГО ЗАЛОЖЕНИЯ МЕЖДУ ДВУМЯ СТАНЦИЯМИ МЕТРОПОЛИТЕНА ПОСЛЕ АВАРИЙНОГО РАЗРУШЕНИЯ СТАРЫХ ПЕРЕГОННЫХ ТОННЕЛЕЙ | 1996 |
|
RU2105882C1 |
Изобретение относится к проходке подземных выработок щитовым способом. Цель - повышение надежности определения положения проходческого щитового комплекса в процессе проходки на каждый шаг передвижения щита. Перед проходкой заранее определяют в плане проектные точки нахождения центра щита, предствляющие собой точки пересечения радиуса проектной кривой оси тоннеля с прямой направления проходки. Находят угол поворота центра щита на каждый шаг передвижки и в соответствии с ним определяют соответствующие координаты двух точек, расположенных по разные стороны относительно проектной кривой оси тоннеля. Одна из точек является точкой пересечения ножа щита с продольными радиуса проектной кривой оси тоннеля, проходящего через последующий проектный центр щита и совпадающего с направлением передней мерной рейки (МР). Другая точка является точкой пересечения хвоста щита с радиусом проектной оси тоннеля, проходящим через предыдущий центр щита и совпадающим с направлением соответственно задней МР. При продвижении горнопроходческого щитового комплекса по трассе тоннеля проектное удаление точек "Нож" и "Хвост" щита от оси тоннеля сравнивают с фактическим, определяемым по передней и задней горизонтальным МР в соответствующих точках. При этом горизонтальные МР располагают на щитовом комплексе под углом друг к другу, равным центральному углу, и с возможностью перемещения их вдоль радиусов, на которых оси расположены. 1 ил.
| Способ задания проектной оси сооружения,преимущественно тоннеля | 1984 |
|
SU1204729A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
