Изобретение относится к горному делу и строительству и может быть использовано в устройствах автоматического контроля положения проходческих комплексов, применяемых, например, при строительстве тоннелей и коллекторов различного назначения.
Известно устройство автоматического контроля положения проходческого комплекса, включающее стабилизатор с датчиками контроля положения оси выработки, установленными на раздвижных щупах. /См. , например, авторское свидетельство СССР 135050, кл. Е 21 D 1/00, опублик. 1961 г./.
Недостатком такого устройства является то, что оно неточно, громоздко и не может быть использовано, например, в щитовых проходческих комплексах, применяемых при строительстве тоннелей.
Известно также устройство автоматического контроля положения щитового тоннелепроходческого комплекса, включающее размещенный сзади комплекса задатчик направления проходки в виде источника светового луча; закрепленную на корпусе щита визирную цель со встроенным видеодатчиком контроля положения щита, оптическая ось которого в исходном положении колинеарна с визирной целью, и автоматическую систему обработки информации о положении комплекса и выдачи ее оператору. /См., например, SU 949188, кл. Е 21 D 9/06, 07.08.1982/.
Основным недостатком известного устройства является то, что упомянутый видеодатчик со сложной и нежной оптикой размещен на подвижной части проходческого комплекса в весьма ограниченном пространстве и поэтому требует дополнительных средств защиты его от повреждений, а также дополнительного питающего кабеля с соединительной аппаратурой, наращиваемого по мере продвижения комплекса в направлении проходки, что очень трудно, а зачастую и невозможно осуществить в проходческих комплексах, в особенности при строительстве тоннелей и прокладке трубопроводов малого диаметра.
Кроме того, размещение видеодатчика на подвижной части проходческого комплекса обусловлено наличием в системе контроля источника луча /например, лазера/, который служит в качестве задатчика направления проходки и который требует дополнительных энергетических затрат.
Наиболее близким решением к предлагаемому по технической сути и достигаемому результату является устройство автоматического контроля положения проходческого комплекса, включающее задатчик направления проходки в виде теодолита, размещенные спереди и сзади проходческого комплекса визирные цели, видеодатчик контроля статического положения комплекса и автоматическую систему обработки информации о положении комплекса и выдачи ее оператору, электрически связанную с видеодатчиком /см., например, DE 4017833, кл. Е 21 D 9/06, 06.02.1992/.
К недостаткам указанного устройства следует отнести то, что оно не может быть применено для оперативного и непрерывного контроля положения в динамике головной части проходческого комплекса.
Задачей предлагаемого изобретения является создание такого устройства, применение которого позволило бы устранить вышеуказанный недостаток известного устройства и, тем самым, расширить область его применения.
Поставленная задача решается тем, что в устройстве автоматического контроля положения проходческого комплекса, включающем задатчик направления проходки в виде теодолита, закрепленную на корпусе проходческого комплекса визирную цель, видеодатчик и автоматическую систему обработки информации о положении комплекса, электрически связанную с видеодатчиком, последний выполнен с позиционно-чувствительной матрицей и встроен в теодолит, а визирная цель выполнена из светодиодов, размещенных посредством поперечной планки в плоскости, перпендикулярной продольной оси корпуса проходческого комплекса и симметрично относительно этой оси, при этом оптическая ось видеодатчика в исходном положении проходческого комплекса колинеарна с визирной целью.
Сущность изобретения поясняется чертежом, где
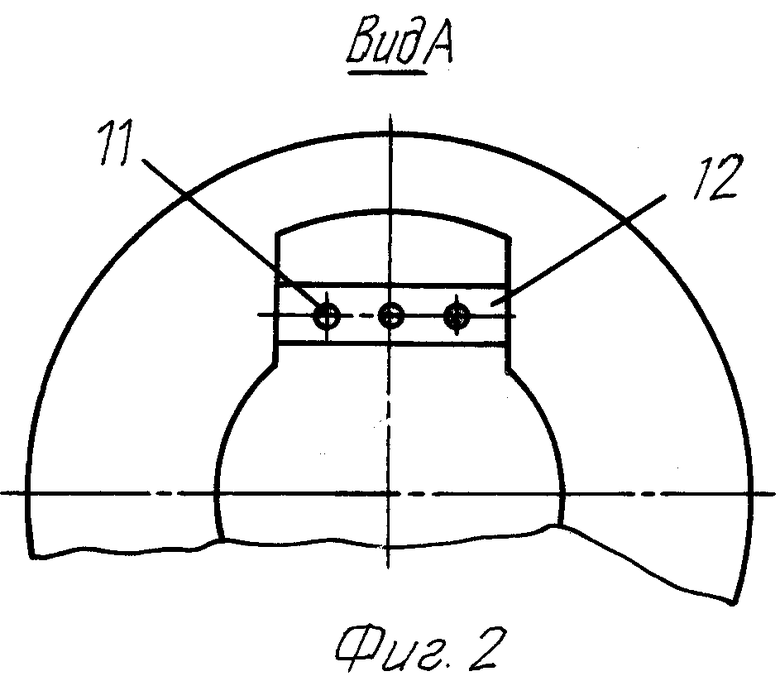
на фиг. 1 - изображен общий схематичный вид проходческого комплекса в продольном разрезе с устройством по настоящему изобретению в положении после прокладки начального участка тоннеля,
а на фиг.2 - вид по стрелке А на фиг.1, изображающий схематично визирную цель с размещенными на ней светодиодами.
Устройство установлено на щитовом тоннелепроходческом комплексе, содержащем головную часть 1 щита, поворотную относительно заданного направления проходки /проектной трассы тоннеля/, и хвостовую часть 2, продольная ось 3 которой совпадает с трассой тоннеля. Головная 1 и хвостовая 2 части щита имеют возможность продольного смещения относительно друг друга благодаря наличию телескопической связи и силовых гидроцилиндров 4 между ними. Как показано на фиг. 1, щит упирается задним торцем в передний торец обделки 5 тоннеля. Задний торец обделки тоннеля уперт в нажимную плиту 6 домкратной станции 7, размещенной в стартовом котловане 8.
Устройство контроля положения проходческого комплекса содержит задатчик направления проходки 9, установленный в стартовом котловане 8 и выполненный в виде стандартного теодолита, снабженного видеодатчиком 10 с позиционно-чувствительной матрицей "ПЗС-матрицей/. На корпусе головной части щита 1, а точнее в выемке его перегородки закреплена /в данном случае неподвижно/ визирная цель, содержащая светодиоды 11, размещенные на планке 12 в плоскости, перпендикулярной продольной оси корпуса головной части 1 щита и симметрично этой оси. В данном случае количество светодиодов составляет три штуки. В исходном положении комплекса /т.е. когда продольная ось щита совпадает с заданной трассой тоннеля/ центр визирной цели установлен на оптической оси видеодатчика 10 /колинеарно/.
Для обработки информации о положении комплекса в пространстве и выдачи этой информации оператору на наземную аппаратуру 13 устройство снабжено автоматической системой обработки информации о положении комплекса, содержащей компьютер с контроллером и монитором /не показаны/, соединенной электрически посредством сигнального кабеля 14 с видеодатчиком 10.
Работает устройство следующим образом.
Проектное направление проходки задают с помощью теодолита 9.
В исходном положении комплекса визирную цель /11, 12/ с помощью гидроцилиндров 4 устанавливают колинеарно с оптической осью видеодатчика 10.
После продвижения головной части 1 щита в направлении проходки с помощью гидроцилиндров 4 вероятны боковые, вертикальные, скручивающие или комбинированные отклонения ее от заданной трассы. В результате этих отклонений происходит смещение визирной цели /11, 12/ с отклонениями светодиодов 11 от исходного положения. Величина и характер этих отклонений фиксируются ПЗС-матрицей видеодатчика 10, сигналы с которого поступают в автоматическую систему для последующей обработки по программам, реализующим алгоритмы расчета определенных смещений, и выдачи на монитор оператору полученных данных. После этого оператор осуществляет обычные действия по дальнейшей работе проходческого комплекса.
Таким образом, разместив видеодатчик в свободной и неподвижной зоне при условии выполнения визирной цели из светодиодов и совмещения этого видеодатчика с теодолитом, задающим направление проходки, стало возможным достижение поставленной цели, а именно - повышение надежности, расширение области применения устройства, а также снижение производственных и эксплуатационных затрат.
По мнению заявителей настоящее техническое решение отвечает критерию изобретения "новизна", поскольку проведенный анализ информации, имеющейся в научно-технической и патентной литературе по данной тематике, показал отсутствие упоминания об известности технических решений, аналогичных заявленному по совокупности признаков, перечисленных в формуле изобретения. Заявленное техническое решение также отвечает критерию изобретения "существенные отличия", поскольку исключение или замена любого из отличительных признаков по формуле изобретения приведет к невозможности достижения поставленной заявителями цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТОМЕР СТРУНЫ ОБРАТНОГО ОТВЕСА | 2009 |
|
RU2398187C1 |
| ВИДЕОИЗМЕРИТЕЛЬ ПЛАНОВЫХ КООРДИНАТ КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2005 |
|
RU2303765C1 |
| ВИДЕОИЗМЕРИТЕЛЬ КООРДИНАТ КОНТРОЛИРУЕМОЙ ТОЧКИ ОБЪЕКТА | 2006 |
|
RU2308002C1 |
| СПОСОБ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБОПРОВОДА | 2000 |
|
RU2160341C1 |
| ПРОХОДЧЕСКИЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ПРЯМОУГОЛЬНЫХ ТОННЕЛЕЙ | 1998 |
|
RU2130120C1 |
| ВИДЕОСТВОРОФИКСАТОР | 2004 |
|
RU2275600C2 |
| ВИДЕОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2584370C2 |
| ВИДЕОУСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2425327C1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| МЕХАНИЗИРОВАННЫЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ СО СБОРНОЙ ОБЖАТОЙ В ПОРОДУ ОБДЕЛКОЙ | 1988 |
|
RU2018677C1 |
Изобретение относится к горному делу и строительству и предназначено для автоматического контроля положения проходческих комплексов, применяемых при строительстве тоннелей и коллекторов различного назначения. Техническим эффектом изобретения является обеспечение надежности устройства и расширение области его применения в проходческих комплексах различного назначения. Для этого задатчик направления проходки в комплексе выполнен в виде теодолита. Визирная цель выполнена из светодиодов, размещенных на корпусе проходческого комплекса посредством поперечной планки в плоскости, перпендикулярной продольной оси корпуса проходческого комплекса и симметрично относительно этой оси. При этом оптическая ось видеодатчика в исходном положении проходческого комплекса колинеарна с визирной целью. 2 ил.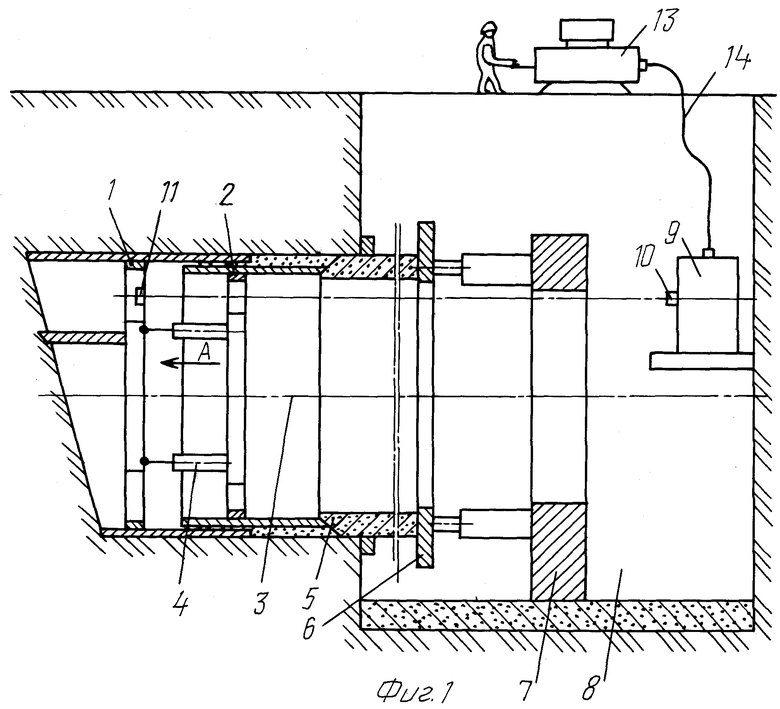
Устройство автоматического контроля положения проходческого комплекса, содержащее задатчик направления проходки в виде теодолита, закрепленную на корпусе проходческого комплекса визирную цель, видеодатчик контроля положения комплекса и автоматическую систему обработки информации о положении комплекса и выдачи ее оператору, электрически связанную с видеодатчиком, отличающееся тем, что видеодатчик контроля положения комплекса выполнен с позиционно-чувствительной матрицей и встроен в теодолит, а визирная цель выполнена из светодиодов, размещенных посредством поперечной планки в плоскости, перпендикулярной продольной оси корпуса проходческого комплекса, и симметрично относительно этой оси, при этом оптическая ось видеодатчика в исходном положении проходческого комплекса колинеарна с визирной целью.
| DE 4017833 С1, 06.02.1992 | |||
| Устройство управления движением проходческого щита | 1980 |
|
SU949188A1 |
| 0 |
|
SU251049A1 | |
| Устройство для автоматического управления машиной | 1973 |
|
SU447475A1 |
| SU 756020 А, 15.08.1980 | |||
| Устройство для определения отклонения вертикального щита | 1981 |
|
SU1023097A1 |
| Устройство для определения отклонения проходческого щита относительно проектной оси тоннеля | 1983 |
|
SU1125375A1 |
| Способ определения положения проходческого щитового комплекса при прохождении его на кривых участках трассы | 1989 |
|
SU1671868A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1990 |
|
RU2013555C1 |
| US 5186579 А, 16.02.1993 | |||
| СПОСОБ ПОДАВЛЕНИЯ МИКРООРГАНИЗМОВ | 2009 |
|
RU2398877C1 |
| DE 19507346 А1, 05.09.1996 | |||
| Способ модификации сополимера винилиденфторида с перфторалкилалкоксиалкил виниловым эфиром | 1974 |
|
SU523907A1 |

