СО
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Регулятор температуры | 1983 |
|
SU1136122A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Цифровой регулятор | 1985 |
|
SU1304004A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Способ стабилизации напряжения или тока | 1985 |
|
SU1288663A1 |
| Устройство для управления дозированием | 1980 |
|
SU932248A2 |
| Преобразователь код-напряжение | 1984 |
|
SU1197084A1 |
| Устройство для контроля метрологических характеристик средств измерений | 1982 |
|
SU1117592A1 |
Изобретение относится к средствам автоматического регулирования физических параметров, в частности давления. Цель изобретения - повышение точности регулятора. Поставленная цель достигается тем, что в известный регулятор, содержащий блок задания параметра, первый цифроаналоговый преобразователь, гистерезисный блок сравнения, исполнительный блок и датчик параметра, введены блок вычитания, усилители, второй цифроаналоговый преобразователь, а также кодовые задатчики старших и младших разрядов, входящие в состав блока задания параметра. 4 ил.
Изобретение относится к средствам автоматического регулирования физических параметров, в частности давления, и может быть использовано в качестве высокоточного исполнительного устройства в прецизионных системах автоматического регулирования, например, давления в камерах высокого давления при синтезе сверхтвердых материалов, изделий порошковой металлургии, химической промышленности и др.
Цель изобретения - повышение точности регулятора.
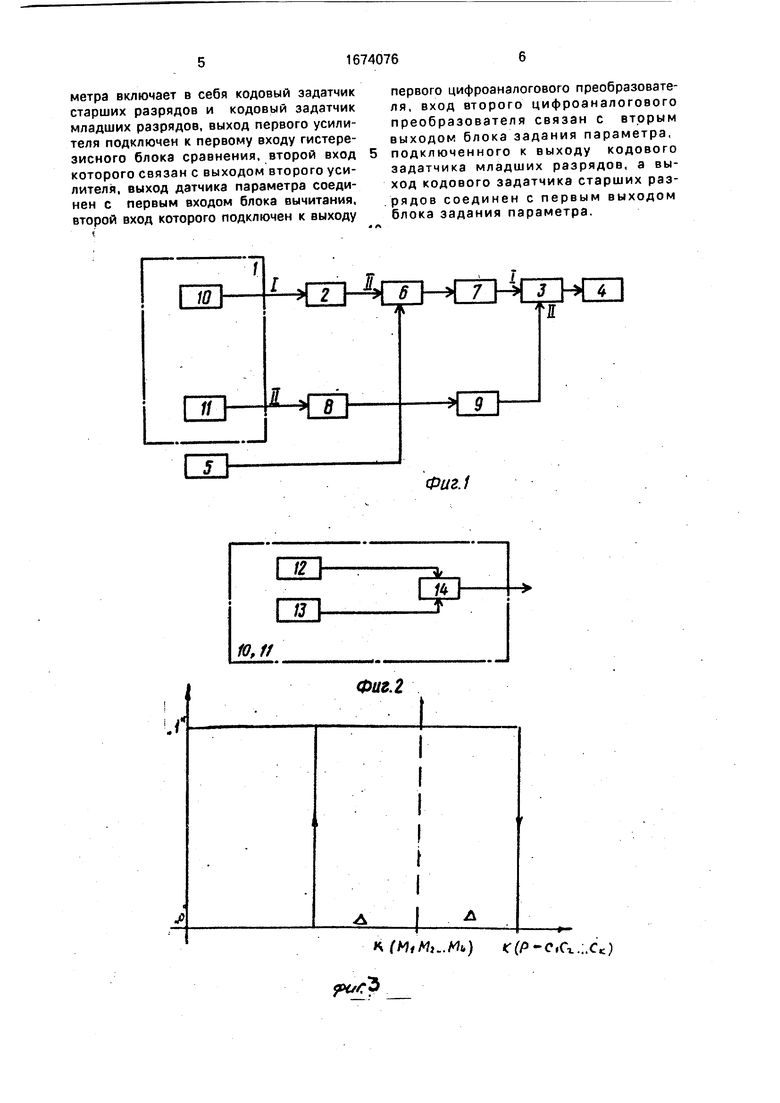
На фиг.1 изображена структурная схема устройства; на фиг.2 - структурная схема блоков задания старших и младших разрядов; на фиг.З - диаграмма работы гистере- зисного блока сравнения; на фиг.4 - диаграммы, поясняющие работу позиционного регулятора.
Позиционный регулятор содержит последовательно соединенные блок 1 задания параметра и первый цифроаналоговый преобразователь 2, последовательно соединенные гистерезисный блок 3 сравнения и исполнительный блок 4, а также датчик 5 параметра. Регулятор содержит последовательно соединенные блок 6 вычитания и первый усилитель 7, а также последовательно соединенные второй цифроаналоговый преобразователь 8 и второй усилитель 9, причем блок 1 задания параметра включает в себя кодовый задатчик 10 старших разрядов и кодовый задатчик 11 младших разрядов. Выход первого усилителя 7 подключен к первому входу гистерезисного блока 3 сравнения, второй вход которого связан с выходом второго усилителя 9, выход датчика 5 параметра соединен с первым входом блока 6 вычитания, второй вход которого
О
2
О VI О
подключен к выходу первого цифроанало- гового преобразователя 2, вход второго цифроаналогового преобразователя 8 связан с вторым выходом блока 1 задания параметра, подключенного к выходу кодового задатчика 11 младших разрядов, а выход кодового задатчика 10 старших разрядов соединен с выходом блока 1 задания параметра.
Каждый из кодовых задатчиков 10 и 11 старших и младших разрядов состоит из двух двоично-десятичных кодовых переключателей 12 и 13, к выходу которых подключенпреобразователь14двоично-десятичного кода в двоичный. Выходом кодовых задатчиков 10 и 11 старших и младших разрядов является выход преоб- ,ователя 14 двоично-десятичного кода в
ДПОПЧ1ШЙ.
Позиционный регулятор давления работает следующим образом.
Пусть необходимо установить и поддерживать давление в системе, заданное десятичным числом:
ClC2......ML.
где СтС2...Ск - старшие разряды чисел;
М ,М2... младшие разряды чисел.
Двоичный код CiC2...Ci и MiM2...Mi, формируется кодовым задатчиком 10 старших разрядов и кодовым задатчиком 11 младших разрядов. Двоично-десятичный код, задаваемый кодовыми переключателями 12 и 13 подается на входы преобразователя 14 дБоич-но-десятичного кода в яоичный, с выхода которого двоичный код подается на вход первого цифроаналогово- гс преобразователя 2, выходной сигнал которою представляет собой постоянное напряжение, пропорциональное входному двоичному коду. С выхода первого цифроа- налоювого преобразователя 2 напряжение, пропорциональное числу Ci,C2...Cx, поступает на второй вход блока 6 вычитания, ;;а первый вход которого поступает напряжение с датчика 5 параметра, соответствующее текущему значению регулируемой величины Р. С выхода блока б вычитания напряжение поступает на вход первого усилителя 7, на выходе которого устанавливается напряжение
Ki(P-CiC2...C,c),
где Ki - коэффициент усиления первого усилителя 7, поступающее на первый вход гис- терезисного блока 3 сравнения.
На второй вход гистерезисного блока 3 сравнения с выхода кодового задатчика 11 млгдших разрядов после второго цифроа- на. югового преобразователя 8 и второго усилителя 9 поступает напряжение
K2(MlM2...MlJ,
где «2 - удельный коэффициент соотношения между старшими и младшими разрядами.
В предлагаемом регуляторе Ki «2 К.
В гистерезисном блоке 3 сравниваются величины К(Р - С1С2...Ск) и K(MiM2...MiJ. Если К(Р - С1С2...Ск) оказывается меньше значения K(MiM2...Mi) - А на выходе гистерезисного блока 3 сравнения устанавливается
сигнал 1, включающий исполнительный блок 4 ( Д- значение напряжения, равное половине ширины петли гистерезиса). При этом давление в системе увеличивается. Если значение К(Р - CiC2...Ci) оказывается
больше значения K(MiM2...ML) + Л, на выходе гистерезисного блока 3 сравнения устанавливается сигнал О, выключающий исполнительный блок 4 (фиг.З).
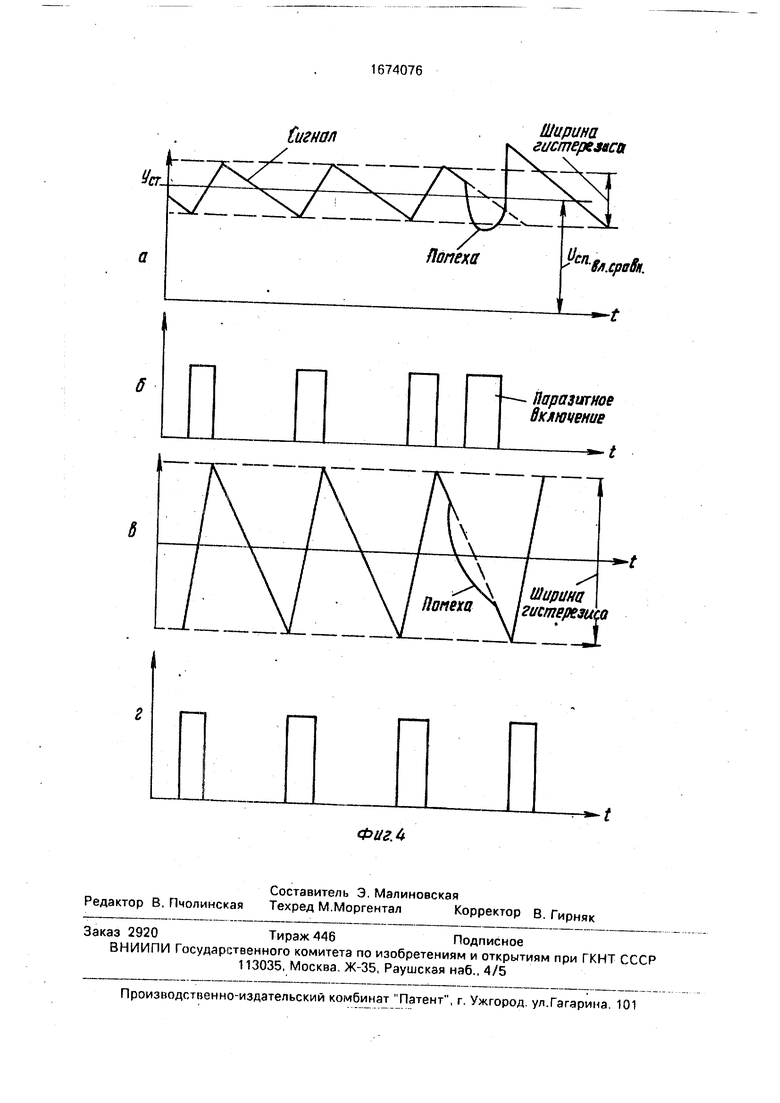
На фиг.4б представлены временные диаграммы, поясняющие работу прототипа, на фиг.4в, г - временные диаграммы, поясняющие работу позиционного регулятора. Как видно из фиг.4а, помеха, поступающая на вход блока 3 сравнения вызывает ложное
срабатывание устройства-прототипа (фиг.4б), в предлагаемом техническом решении это ложное срабатывание (фиг.4 в,г) устранено вследствие увеличения ширины гистерезиса.
Благодаря введению дополнительных блоков с соответствующими связями удалось использовать блок 3 сравнения с большой шириной гистерезиса, значительно превышающей уровень помех и наводок.
воздействующих на гистерезисный блок 3 сравнения, и уровень собственных шумов и дрейфов блока 3 сравнения, т.е. удалось повысить точность регулятора. Использование предложенного регулятора позволит
исключить брак из-за отклонения от заданного диапазона давлений в процессе синтеза сверхтвердых материалов, повысить физико-механические свойства сверхтвердых материалов на 25% за счет стабильно5 сти повторяемости режимов.
Формула изобретения Позиционный регулятор, содержащий последовательно соединённые блок задания параметра и первый цифроаналоговый
0 преобразователь, последовательно соединенные гистерезисный блок сравнения и ис- полнительный блок, а также датчик параметра, отличающийся тем, что, с целью повышения точности регулятора, он
5 содержит последовательно соединенные блок вычитания и первый усилитель, а также последовательно соединенные второй цифроаналоговый преобразователь и второй усилитель, причем блок, задания параметра включает в себя кодовый задатчик старших разрядов и кодовый задатчик младших разрядов, выход первого усилителя подключен к первому входу гистере- зисного блока сравнения, второй вход которого связан с выходом второго усилителя, выход датчика параметра соединен с первым входом блока вычитания, второй вход которого подключен к выходу
| Ш-
L
/г
первого цифроаналогового преобразователя, вход второго цифроаналогового преобразователя связан с вторым выходом блока задания параметра, подключенного к выходу кодового задатчика младших разрядов, а выход кодового задатчика старших разрядов соединен с первым выходом блока задания параметра.
Фиг.1
(,..Ми) Г(Р-С,(Ч...СО
б
Ширина
Паразитное включение
| Справочник по схемотехнике для радиолюбителя/ Под ред | |||
| В.П | |||
| Боровского | |||
| - Киев: Техника, 1987, с.209 - 210 | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
