х
Изобретение относится к регулирующим и управляющим системам общего назначения, в частности к устройствам адресного управления подвижным объектом и может быть использовано для управления кранамиштабелерами, лифтами, подъемниками и другими подвижными объектами с определенным количеством пунктов адресования.
Известна цифровая система автоматического регулирования, содержащая программное задающее устройство, выход которого подключен к первому входу сумматора, выходы которого подключены к регистру на 1 m - п 1 разрядов, выходы п старщих разрядов которого подключены соответственно к входам п-входов логического элемента ИЛИ, а выходы m младщих разрядов подключены -к первым входам m двух входовых элементов ИЛИ, вторые входы которых подключены к выходу h-входового элемента ИЛИ, а выходы подключены к последовательно соединенным преобразователю кода в направление, усилителю, силовой части системы, датчику обратной связи, выходом подключенному к второму входу сумматора 11Недостатком данной системы является низкая точность, обусловленная больщим временем торможения, а также ограниченные функциональные возможности, так как система не определяет направление движения подвижного объекта.
Наиболее близким техническим решением к предлагаемому является цифровая система программного управления, содержащая последовательно включенные преобразователь код-направление, усилитель, блок управления, датчик обратной связи и сумматор, второй вход которого соединен с выходом блока задания программ, а выходы старших разрядов которого подключены к элементу ИЛИ, логический блок выделения старшего разряда, один вход которого соединен с выходом элемента ИЛИ, другие входы которого соединены с соответствующими выходами младших разрядов сумматора, а выходы которого соединены с соответствующими входами преобразователя код-напряжение.
Известная система позволяет с высокой точностью производить автоматическое управление подвижным объектом и, при приближении к заданному адресу, осушествлять плавное торможение объекта путем снижения 11();и.1васм()|-о на блок управления управ.iHK)iuero на11)яжепия 2.
Нелостятком известной С1 стемы является то. что она не определяет необходимое iianpaB.ieime движения подвижного объекта и не выдаст сигналы направления движения на исполнительный механизм, т.е. имеет ограниченп1.1е функциональные возможноети.
Цель и:1обретения - расширение функциональных возможностей устройства путем обеспечения автоматического выбора направления движения.
Указанная цель достигается тем, что в устройство для адресного управления объектом, содержащее сумматор, выходы п старших разрядов которого через элемент ИЛИ, а выходы младших разрядов непосредственно подключены к входам цифроаналогового преобразователя, а также задатчик адреса и блок управления, соединенный выходом с датчиком обратной связи, в него введены элемент НЕ, первая и вторая группа элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и последовательно соединенные генератор тактовых импульсов, элемент И и триггер, первый выход которого подключен к первым входам элементов ИСКЛЮЧАЮЩЕЕ ИЛИ первой группы и к первому входу блока управления, второй выход - к первым входам элементов ИСКЛЮЧАЮЩЕЕ ИЛИ второй группы и к второму входу блока управления, второй вход элемента И через элемент НЕ подключен к выходу переноса сумматора, выходы задатчика адреса соединены с вторыми входами элементов ИСКЛЮЧАЮЩЕЕ ИЛИ первой группы, выходы которых подключены к первым входам сумматора, соединенного вторыми входами с выходами элементов ИСКЛЮЧАЮЩЕЕ ИЛИ второй группы, BTOpbie входы которых подключены к выходам датчика обратной связи.
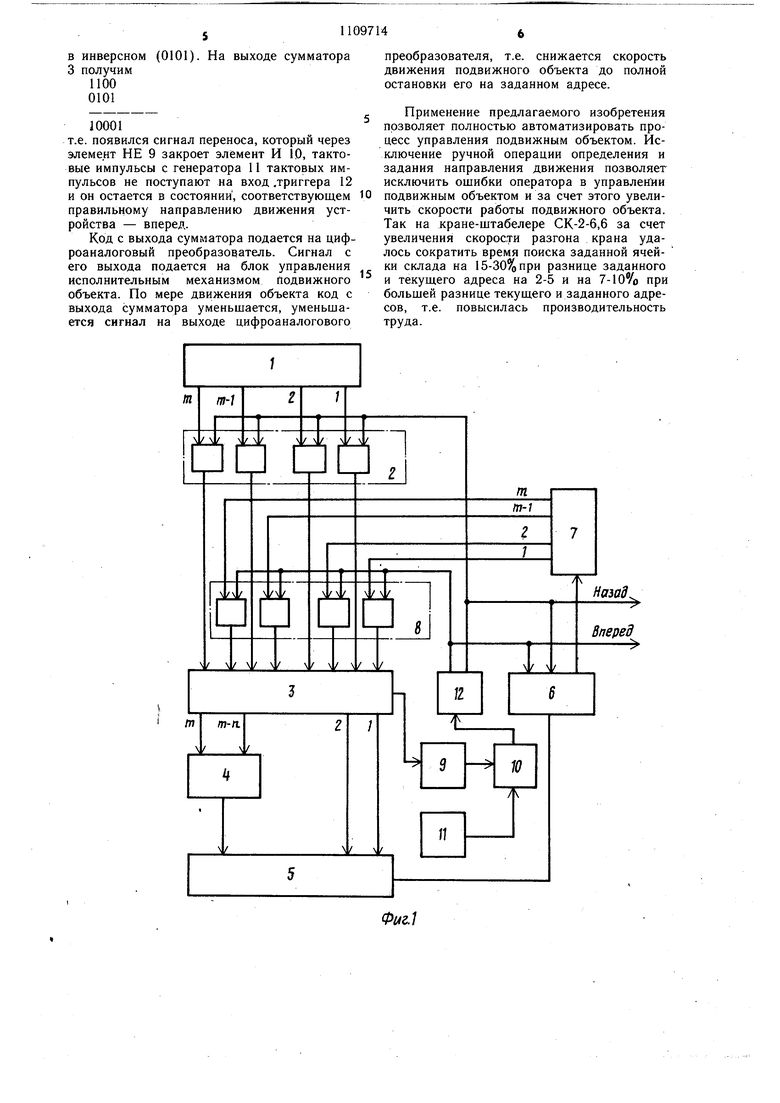
На фиг. 1 приведена структурная схема; на фиг. 2 - структурная схема блока управления.
Устройство содержит задатчик 1 адреса, выходы каждого разряда которого через первую группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 2 подключены к входа.м сумматора 3, выходы п старших разрядов которого через элемент ИЛИ 4, а выходы младших разрядов непосредственно подключены к последовательно соединенным цифроаналоговому преобразова.телю 5, блоку 6 управления и датчику 7 обратной ;;вязи. Выходы каждого разряда датчика 7 обратной связи через вторую группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 8 подключены к входам сумматора. Выход переноса сумматора подключен к входу элемента НЕ 9, выходом подключенного к элементу И 10, к второму входу подключен выход генератора 11 тактовых импульсов. Выход элемента И подключен к входу триггера 12, первый выход которого подключен к устройству управления и к второму входу каждого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ первой группы, а второй выход подключен к устройству управления и к второму входу каждого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ второй группы.
Блок управления (фиг. 2) содержит блок реверса «Вперед« 13 и «Назад 14, выходы которых подключены к двигателю 15. В устройстве блоки реверса подключаются соответственно к выходам «Вперед и «Назад триггера 12, двигатель 15 подключен к выходу ЦАП 5 и механически к датчику 7 обратной связи.
В кране-штабелере СК-2, 0-6,66 в качестве блоков реверса используются пускатели магнитные ПМЕ-214, которые по командам с триггера 12 «Вперед или «Назад (поступающим через промежуточные реле) осуществляют переключение фаз двигателя и тем самым меняют направление его вращения.
В качестве задатчика 1 адреса может использоваться любое устройство, обеспечивающее выдачу заданного адреса в двоичном коде. В качестве задатчика адреса возможно также использовать устройства ввода с перфоленты или перфокарт. В качестве сумматора 3, триггера 12, элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 2 и 8, ИЛИ 4, И 10 и НЕ 9 использованы микросхемы серии К 155. Выполнение цифроаналогового преобразователя 5, 6 управления и датчика
7обратной связи может быть различным в зависимости от типа подвижного объекта
При реализации предлагаемого изобретения на кране-щтабелере СК-2-6,6 в качестве цифроаналогового преобразователя 5 использовалась резистивная матрица, переключение которой осуществлялось промежуточными реЛе. В качестве датчика обратной связи использованы датчики типа КВП-16, включенные по одному на каждый разряд и выдающие двоичный код текущего адреса.
В предлагаемом устройстве для осуществления плавного торможения производится непрерывное определение разности между текущим и заданным адресами, причем всегда из больщого адреса вычитается меньший.
8двоичной арифметике операция вычитания производится путем сложения больщого числа с обратным (проинвертированным) меньшим. При этом возникает сигнал переноса. Инверсия меньшего адреса производится с помощью элементов ИСКЛЮЧАЮЩЕЕ ИЛИ (2 или 8). Инверсия производится как с текущим, так и с заданным адресами, в зависимости от того, какой из них меньще.
Устройство работает следующим образом.
При работе возможны два случая: при задании нового адреса сигнал направления движения не должен изменяться, т.е. в сумматоре 3 происходит сложение большего кода адреса с лроинвертированным меньщим, при этом .возникает сигнал переноса через элемент НЕ 9, закрывает элемент И 10, который не пропускает импульсы с генератора
11тактовых импульсов на вход триггера
12и триггер остается в исходном состоянии; при задании нового адреса сигнал направления движения должен изменяться.
В сумматоре 3 происходит сложение меньшего кода адреса с проинвертированным больщим. Сигнал переноса не возникает.
элемент И 10 открывается и на вход триггера 12 поступает импульс, который его переключает в другое состояние, т.е. происходит смена сигнала направления движения.
Меняются на противоположные и сигналы, поступающие с выходов триггера 12 на элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 2 и 8. После смены сигналов тот элемент, который работал как повторитель, становится инвертором, а который раньше инвертировал сиг0 нал, становится повторителем. В сумматоре 3 происходит сложение большего сигналас проинвертированным меньшим. Возникший сигнал переноса через элемент НЕ 9 закрывает элемент И 10 и тактовые импульсы на вход триггера 12 не поступают.
Направление движения запомнилось в триггере до новой смены адреса.
В начальный момент времени состояние триггера 12 может быть любым. Предположим, что на первом выходе триггера логи0 ческая «1, на втором - логический «О, что соответствует направлению движения устройства назад. При этом первая группа элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 2 проинвертирует код заданного адреса, через вторую группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 8 код текущего адреса поступит на сумматор 3 без инверсии. Пусть текущий адрес, где находится устройство, соответствует 10 (в двоичном коде 1010), вновь заданный адрес 4 ( в двоичном коде 0100). Проинвертированный заданный адрес (1011) суммируется в сумматоре 3 с текущим
1011
1010
10101
5 Полученный при этом сигнал переноса ин.вертируется элементом НЕ 9 и не открывает элемент И 10, т.е. направление движения, заданное триггером 12, соответствует необхЬдимому для поиска вновь заданного адреса.
0 Пусть триггер 12 находится в том же состоянии (направление движения назад), но заданный адрес - 12, больше текущего 10. В сумматоре 3 проинвергированный заданный адрес (код ООН) суммируется с те, кущим
I ООН 1010
1101 При этом сигнал переноса не получен (ра0 вен «О), на выходе элемента НЕ 9 появляется логическая «1 и тактовый импульс с генератора 11 тактовых импульсов через элемент И 10 подается на вход триггера 12 и переключает его в противоположное состояние: на первом выходе логический «О,
5 на втором - логическая «1, что соответствует направлению движения вперед. При этом на сумматор 3 заданный адрес поступает в прямом коде (1100), а текущий -
в инверсном (0101). На выходе сумматора 3 получим
1100
0101
10001
т.е. появился сигнал переноса, который через элемент НЕ 9 закроет элемент И 10, тактовые импульсы с генератора 11 тактовых импульсов не поступают на вход .триггера 12 и он остается в состоянии, соответствующем правильному направлению движения устройства - вперед.
Код с выхода сумматора подается на цифроаналоговый преобразователь. Сигнал с его выхода подается на блок управления исполнительным механизмом Подвижного объекта. По мере движения объекта код с выхода сумматора уменьшается, уменьшается сигнал на выходе цифроаналогового
преобразователя, т.е. снижается скорость движения подвижного объекта до полной остановки его на заданном адресе.
Применение предлагаемого изобретения позволяет полностью автоматизировать процесс управления подвижным объектом. Исключение ручной операции определения и задания направления движения позволяет исключить ошибки оператора в управлении подвижным объектом и за счет этого увеличить скорости работы подвижного объекта. Так на кране-штабелере СК-2-6,6 за счет увеличения скорости разгона крана удалось сократить время поиска заданной ячейки склада на 15-30% при разнице заданного и текущего адреса на 2-5 и на 7-10%) при большей разнице текущего и заданного адресов, т.е. повысилась производительность труда.
/
/3
/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресного управления объектом | 1985 |
|
SU1272309A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Устройство для программного управления | 1983 |
|
SU1087960A1 |
| Аналого-цифровая следящая система | 1988 |
|
SU1522152A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Устройство для отображения информации на экране цветного телевизионного индикатора | 1986 |
|
SU1387038A1 |
| Генератор векторов | 1988 |
|
SU1596375A2 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕЧЕТКОЙ ИНФОРМАЦИИ | 2000 |
|
RU2182359C2 |

УСТРОЙСТВО ДЛЯ АДРЕСНОГО УПРАВЛЕНИЯ ОБЪЕКТОМ, содержа-, щее сумматор, выходы п старших разрядов которого через элемент ИЛИ, а выходы младших разрядов непосредственно подключены к входам цифроаналогового преобразователя, а также задатчик адреса и блок управления, соединенный выходом с датчиком обратной связи, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения автоматического выбора направления движения устройства, в него введены элемент НЕ, первая и вторая группы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и последовательно соединенные генератор тактовых импульсов, элемент И и триггер, первый выход которого подключен к первым входам элементов ИСКЛЮЧАЮЩЕЕ ИЛИ первой группы и к первому входу блока управления, второй выход - к первым входамэлементов ИСКЛЮЧАЮЩЕЕ ИЛИ второй, группы и к второму входу блока управления, второй вход элемента И через элемент НЕ подключен к выходу переноса сумматора, выходы задатчика адреса соединены с вторыми входами элементов ИСКЛЮЧАЮЩЕЕ ИЛИ первой группы, выходы которых подключены к первым входам сумматора, соединенного вторыми входами с выходами элементов (Л ИСКЛЮЧАЮЩЕЕ ИЛИ второй группы, вторые входы которых подключены к выходам датчика обратной связи.
/С7
Ф1лг2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровая система автоматического регулирования | 1973 |
|
SU447684A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая система программного управления | 1976 |
|
SU624210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
