Изобретение относится к области исследования физико-механических характеристик грунта и может быть использовано для оперативного прогнозирования проходимости и оценки параметров движения транспортного средства в процессе его перемещения по трассе.
Целью изобретения является снижение энергозатрат и повышение производительности.
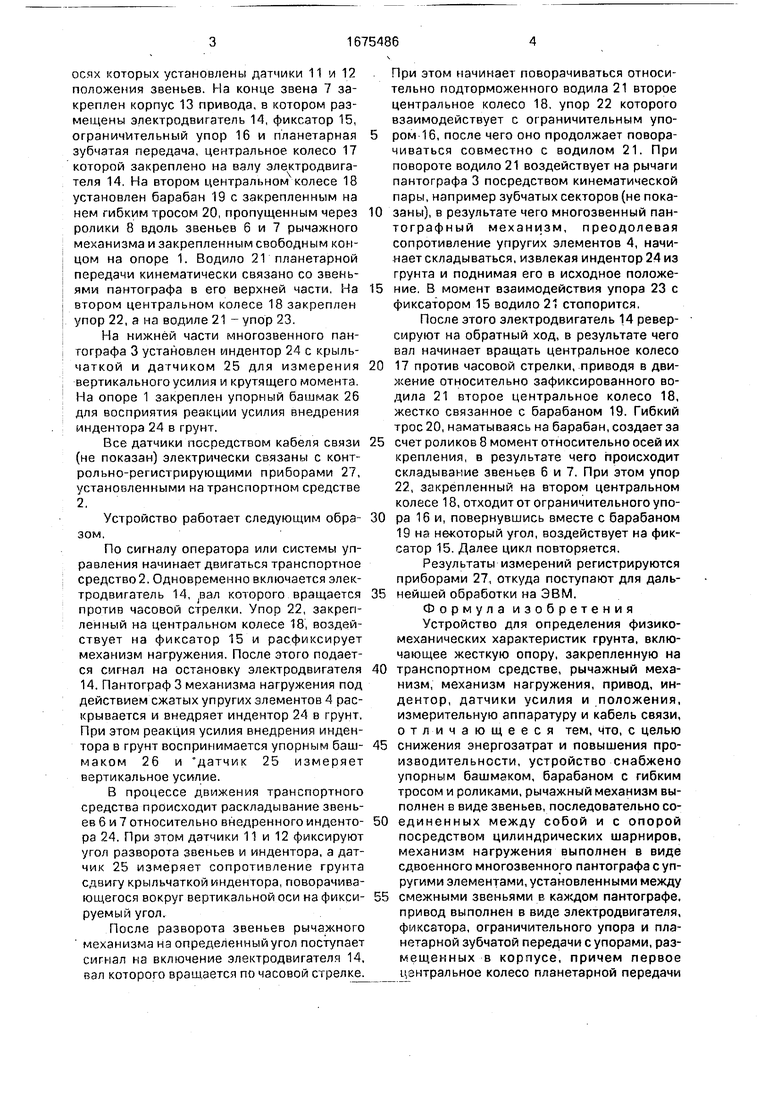
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же. вид сверху; на
фиг. 3 - схема привода; на фиг. 4 - вид А на фиг. 3.
Устройство содержит опору 1, закрепленную на транспортном средстве 2, механизм нагружения в виде сдвоенного многозвенного пантографа 3 с упругими элементами 4, установленными между смежными звеньями, и датчиком 5 угла раскрытия смежных звеньев, рычажный механизм в виде звеньев 6 и 7 с закрепленными на них роликами 8, последовательно соединенных между собой и с опорой посредством цилиндрических шарниров 9 и 10, на
Os VJ
ел
00
а
осях которых установлены датчики 11 и 12 положения звеньев. На конце звена 7 закреплен корпус 13 привода, в котором размещены электродвигатель 14, фиксатор 15, ограничительный упор 16 и планетарная зубчатая передача, центральное колесо 17 которой закреплено на валу электродвигателя 14. На втором центральном4колесе 18 установлен барабан 19 с закрепленным на нем гибким тросом 20, пропущенным через ролики 8 вдоль звеньев 6 и 7 рычажного механизма и закрепленным свободным концом на опоре 1. Водило 21 планетарной передачи кинематически связано со звеньями пантографа в его верхней части, На втором центральном колесе 18 закреплен упор 22, а на водиле 21 - упор 23.
На нижней части многозвенного пантографа 3 установлен индентор 24 с крыльчаткой и датчиком 25 для измерения вертикального усилия и крутящего момента На опоре 1 закреплен упорный башмак 26 для восприятия реакции усилия внедрения индентора 24 в грунт.
Все датчики посредством кабеля связи (не показан) электрически связаны с контрольно-регистрирующими приборами 27, установленными на транспортном средстве 2.
Устройство работает следующим образом.
По сигналу оператора или системы управления начинает двигаться транспортное средство 2. Одновременно включается электродвигатель 14, ал которого вращается против часовой стрелки. Упор 22, закрепленный на центральном колесе 18, воздействует на фиксатор 15 и расфиксирует механизм нагружения. После этого подается сигнал на остановку электродвигателя 14. Пантограф 3 механизма нагружения под действием сжатых упругих элементов 4 раскрывается и внедряет индентор 24 в грунт. При этом реакция усилия внедрения индентора в грунт воспринимается упорным башмаком 26 и датчик 25 измеряет вертикальное усилие.
В процессе движения транспортного средства происходит раскладывание звеньев 6 и 7 относительно внедренного индентора 24. При этом датчики 11 и 12 фиксируют угол разворота звеньев и индентора, а датчик 25 измеряет сопротивление грунта сдвигу крыльчаткой индентора, поворачивающегося вокруг вертикальной оси на фиксируемый угол.
После разворота звеньев рычажного механизма на определенный угол поступает сигнал на включение электродвигателя 14, вал которого вращается по часовой стрелке.
При этом начинает поворачиваться относительно подторможенного водила 21 второе центральное колесо 18, упор 22 которого взаимодействует с ограничительным упо- ром 16, после чего оно продолжает поворачиваться совместно с водилом 21. При повороте водило 21 воздействует на рычаги пантографа 3 посредством кинематической пары, например зубчатых секторов (не пока- 0 заны), в результате чего многозвенный пан- тографный механизм, преодолевая сопротивление упругих элементов 4, начинает складываться, извлекая индентор 24 из грунта и поднимая его в исходное положе- 5 ние. В момент взаимодействия упора 23 с фиксатором 15 водило 21 стопорится,
После этого электродвигатель 14 реверсируют на обратный ход, в результате чего вал начинает вращать центральное колесо 0 17 против часовой стрелки, приводя в движение относительно зафиксированного водила 21 второе центральное колесо 18, жестко связанное с барабаном 19. Гибкий трос 20, наматываясь на барабан, создает за 5 счет роликов 8 момент относительно осей их крепления, в результате чего происходит складывание звеньев 6 и 7. При этом упор 22, закрепленный на втором центральном колесе 18, отходит от ограничительного упо- 0 ра 16 и, повернувшись вместе с барабаном 19 на некоторый угол, воздействует на фиксатор 15. Далее цикл повторяется.
Результаты измерений регистрируются приборами 27, откуда поступают для даль- 5 нейшей обработки на ЭВМ.
Формула изобретения Устройство для определения физико- механических характеристик грунта, включающее жесткую опору, закрепленную на 0 транспортном средстве, рычажный механизм, механизм нагружения, привод, индентор, датчики усилия и положения, измерительную аппаратуру и кабель связи, отличающееся тем, что, с целью 5 снижения энергозатрат и повышения производительности, устройство снабжено упорным башмаком, барабаном с гибким тросом и роликами, рычажный механизм выполнен в виде звеньев, последовательно со- 0 единенных между собой и с опорой посредством цилиндрических шарниров, механизм нагружения выполнен в виде сдвоенного многозвенного пантографа с упругими элементами, установленными между 5 смежными звеньями в каждом пантографе, привод выполнен в виде электродвигателя, фиксатора, ограничительного упора и планетарной зубчатой передачи с упорами, раз- мещенных в корпусе, причем первое центральное колесо планетарной передачи
установлено на выходном валу электродвигателя, а упоры закреплены на втором центральном колесе планетарной передачи и на водиле, при этом своей верхней частью пантограф кинематически связан с водилом планетарной передачи, а нижней частью - с индентором, корпус привода установлен на последнем от опоры звене рычажного механизма, барабан с гибким тросом жестко свя- зан со вторым центральным колесом
0
планетарной передачи, ролики закреплены на осях цилиндрических шарниров и на звеньях рычажного механизма, гибкий трос закреплен одним концом на опоре, а другим на барабане и пропущен через ролики вдоль звеньев рычажного механизма, а упорный башмак жестко закреплен на опоре с возможностью взаимодействия с верхней частью пантографа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
| ПЛАНЕТАРНАЯ ШАРОВАЯ МЕЛЬНИЦА | 1992 |
|
RU2049554C1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Пресс для штамповки обкатыванием | 1988 |
|
SU1602596A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ГРУНТА | 1990 |
|
RU2028601C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2365916C1 |
| Захватное устройство | 1988 |
|
SU1625684A1 |
| Приводное устройство | 1989 |
|
SU1705062A1 |
| ПРИВОД ЗАБОРНОГО ОРГАНА ЩЕБНЕОЧИСТИТЕЛЬНОЙ МАШИНЫ | 2000 |
|
RU2175943C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |


Изобретение относится к области исследования физико-механических характеристик грунта и может быть использовано для оперативного прогнозирования проходимости и оценки параметров движения транспортного средства в процессе его перемещения по трассе. Целью изобретения является снижение энергозатрат и повышение производительности. Устройство для определения физико-механических характеристик грунта включает жесткую опору, закрепленную на транспортном средстве, рычажный механизм в виде звеньев, последовательно соединенных между собой и с опорой посредством цилиндрических шарниров, механизм нагружения в виде сдвоенного многозвенного пантографа с упругими элементами, установленными между смежными звеньями, привод в виде электродвигателя, планетарной зубчатой передачи, фиксатора и упоров, размещенных в корпусе, индентор, датчики усилия и положения, измерительную аппаратуру и кабель связи. Привод установлен на последнем от опоры звене рычажного механизма и посредством барабана и трособлочной системы, установленной на звеньях рычажного механизма, взаимодействует с опорой, на которой установлен упорный башмак с возможностью взаимодействия с верхней частью пантографа, на нижней части которого закреплен индентор. 4 ил. у И
26
Риг. 2
/У////
/////
21
Л
A,,N ВидА
Редактор Г. Наджарян
Фиг.4
Составитель Н. Евстигнеев Техред М.Моргентал
/////
/V/V
77
Н
18
11
Корректор С. Черни
| ПЕРЕДВИЖНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ | 0 |
|
SU203995A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения механических характеристик грунта | 1983 |
|
SU1106874A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
