оп::..:итг;1 if м;щ..1но- Т б:,;ГЬ t-i. . ;оп|, ;,
.: ипулятороп с элс с-
ИГ:О 5р Г СНГ. строен;.,О И (юг конструкциях . гр;г-(с.с кип гфнг.о/доу..
Цс Лыа изобретении является умен . /. . габаритов и повы с-мн.; надежности и долгот- -шости rip;; /;oc i оженим 1 ЫСОКОЙ ре. - ОНТОПрИГОДж. Г. 1.1.
Но фиг. 1 изображено природное устройство, oii-дпй РИД, ро.чрз:;; на фиг. 2 - вид Л на фиг..
Приводное устройство г. о в г. ::: т корпус, состоящий из трех частей 1, 2 и 3. Б первом часл и корпус л (блок приводного двигателя) размещен двигатель, выполненный з виде бесконтактного сккхромного элыстродвига- теля Ц с датчиком положения ротора 5. Роторы датчика и двигателя фиксированы на полом вялу 6, каждый ширается ка две подшипниковые опоры и 8 корпуса. На одном конце полого с; зла 6 выполнен зубчатый пенец 9 центрального зубчатого колеса планетарного редуктора, а на другом - установлен тормоз. Тормоз состоит из фрикционного диска 10, который жестко связан с полым палом 6, фрикционного диска 1 1, зафиксированного от прсаорота в корпусе тормоза 12, электромагнита 13 и пружины И. В полости вала 6 размещена основная передача винт - гайка, состоящая из винта 15 и гайки 16.
Во второй части корпуса (блок редуктора) размерен планетарный редуктор, состоящий из двух степеней.Каждая ступень представляет собой простую планетарную передачу, причем сателлиты 1 первой ступени образуют зубчатую передачу с зубчатым сенцом 9 полого вала 6, а в подиле 18 первой ступени выполнено центральное отоерстие, в котором размещена та че основная передача впит - гайка. Винт 15 основной псог-дачи винт -гайка установлен по второй части 2 корпуса но радизл(-- 0-упорных подшипника 19 при помоги переходной «тулки 20 и иестко связан с ведчгом 21 по второй ступени планетарного редуктора.
Выходное зг-..:но пр;:водного устройства COCTOI T ИЗ ТРУР-: 2., НЛ КОТОРОЙ
закреплено ухо . PNXCVOC- лн . но
«ЫПОЛНСНО ПОЛЬ;1. И Чсч ГКО СНЯЛЛЬО С
гайкой 1б. П пспост. ni-i чг./ нс.то
ПРОХОДИТ СМИТ 1 ; , И rHXO.V OC ЛПОНО
-1
моиет гк.ремечцаться пнутри полого вала 6 и отверстия п водпле 18.
П -iptibfH части 3 корпуса размещен
блок МО;;.н ЦИОНИрОЬ ЧПИР , СОСТОЯЩИЙ ИЗ
кочцепых пыключа к-лей ных в т рс i ьей мае ги 3
2(, установлен- корпуса н;i крон
0
5
0
-Ji
и
винтовой пере/ ачи, нкло- и гайку 27. В связан с вход0
штс1;1не
чающей с: себя винт 26 Винт 26 км с:мптически нь м звеном блока позицнонироиания посредством, например, зубчатой передачи, причем входным звеном является сал-шестерня .8 этой зубчатой передачи. Па торце вала-ш .стерми 28 имеется зуб, который входит в шлиц, выполненный на торце винта 15. Вал-гшестерня 28 входит в зацепление с зубчатым колесом V-j, которое кестко связано с винтом 26 передами, а гайка 27 представляет собой ползун, зафиксированный от пропорота направляющей осью 30. Ползун монет поочередно взаимодействовать с концевыми выключателями 2(. Концевые выключатели закреплены на кронштейне 25 винтами 31. Ослабляя винты 31, концепые выключатели 2k можно перемещать по направляющим прорезям кронштейна 25, регулируя тем самым ход выходного звена приводного устройства.
С торца третьей части 3 корпуса имеется крышка 32 с ухом.
Все части корпуса жестко соедине- г ны мекду собой посредством разъемного соединения, например, при помощи болтов 33.
На обьекте приводное устройство крепится при помощи уха 23 па выходном заене и уха на крышке 32.
Принодное устройство работает следу ющчм об раз см.
/1ля выдвижения выходного звена
5
0
5
на k
обмотки статора электродвигателя
и электромагнита 13 тормоза подается нап;;л, питли.:я ,при этом фракционный диск 11 отходит от фрикционного Диего 10, т.е. тормоз размыкается, и полый вал 6 начинает вращаться, Крут: лий момент с сала 6 передается через зубчатый венец 9 на первую ступень планетарного редуктора и дал-:е через этот редуктор на винт 15 пергдгл;п винт-гайка.. Так как гай- кл 16 передачи пинт-глйча жестко связан г. с г.- -однмм зг)-;1,с 1, а корпус, и выходное ., устпчоилеиннс: на o6v екти Р| н ii/MO.,;i ч.тп, зг С кс рогпнь1 от пр .- о;:ог.я, то при г)Л1;СН1и пинга
15 выходное ruietio совершает поступательное движение.
Так как пинт 15 посредстпом стыковочного узла связан с палом-шестерней
28 блока позиционирования, то при вращении винта 15 вращается вал-ие- стерня 28, далее - зубчатое колесо
29 и винт 26. Ползун совершает поступательное перемещение вдоль винта 26, ив крайнем выдвинутом полскении выходное звено взаимодействует с концевым выключателем 2. При этом электромагнит 13 тормоза электродвига- тель обесточиваются, фрикционный : диск .11 посредством 1 прижимается к диску 10, полый вал 6 перестает вращаться, и выходное звено прекращает движение.
вод перемещения выходного звена, вклчающий двигатель, планетарный редуктор и основную передачу винт - гайка, отличающееся тем, что, с целью повышения надежности и долговечности и уменьшения габаритов, оно снабжено полым валом, тормозом и блоком позиционирования выходного звена, корпус выполнен из трех составных мастей, связанных между собой разъемными соединениями, причем в первой части корпуса размещены полый вал, на одном конце которого размещен тормоз, двигатель, выполненный в виде бесконтактного синхронного электродвигателя с датчиком положения ротора, смонтированного на полом валу, и выходное звено
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| МЕХАНИЗМ ПОВОРОТА СТОЙКИ | 2001 |
|
RU2221736C2 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2014 |
|
RU2551695C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| МЕХАНИЗМ ПОДЪЕМА ГРУЗА | 2010 |
|
RU2446090C1 |
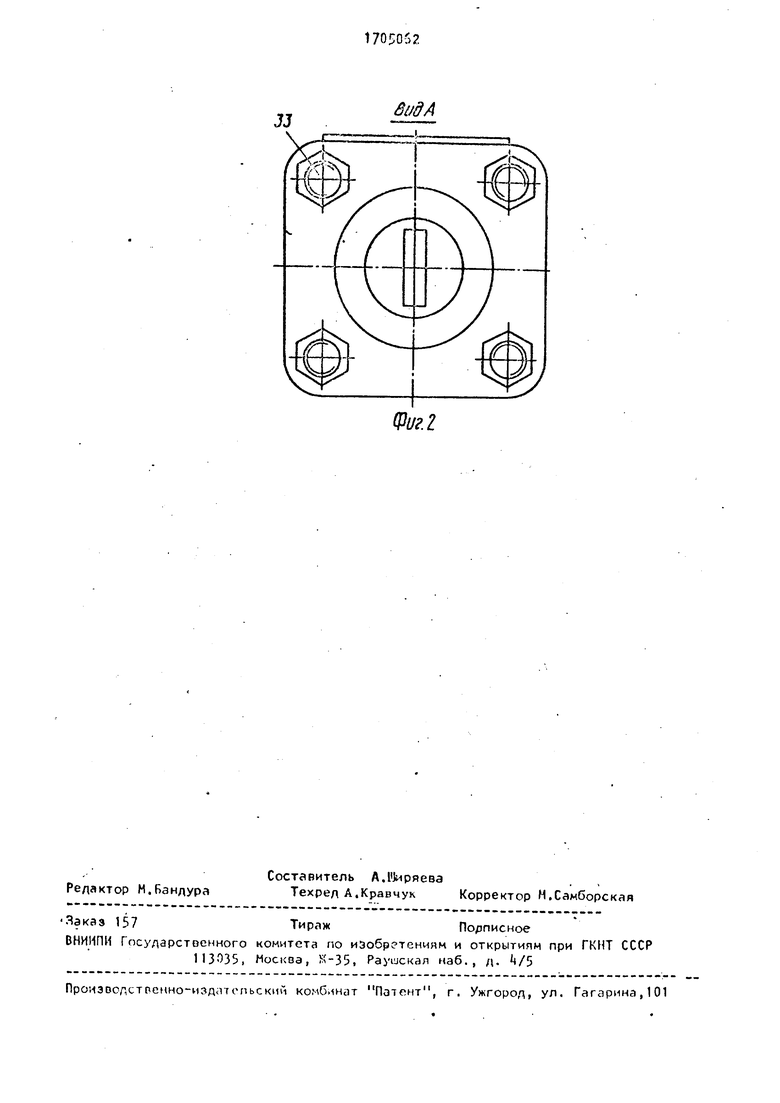
Изобретение относится к машиностроению и может быть использовано в конструкциях тнипуляторов с электрическим приводом. Целью и.зобрете- ния является уменьшение габаритов и улучшение эксплуатационных хлракте- ристик, а именно надежности и долговечности при достижении высокой ремонтопригодности. Это достигается тем, что приводное устройство состоит из корпуса, выполненного состав- ньм из частей 1, 2 и 3, при этом в первой части корпуса размерен бесг -- т tOflOfC I | блок2 контактный тель с датч смонтирован одном конце моз, а на д чатый венец го колеса п выходное зв и жестко св полости это ложен винт размещен пл ходное звено переходной 15 основной В части 3 ко зиционирог.гн кронштейна, 3 корпуса, к установленны ровочного пе передачи, ви чески связан ного узла с дами винт - чена для поо с концевыми Г 1J Ю15 5 8 f 6 7 | П г 19 21 20 J j I / / .// / L llb . .- --V .. - t i t-r-J -«51 ч i (I SМ , (Г Ъ ;L. ,v;. S ; ., Г (Шйтаэшш -- - -- .-.-.--; .Л ,- : rii- - tj Рр. № 1-1 t- , . . t---- --л i -: i -. i :l t -M- - Ь i : : - -, i .-1 - T-r n-MTii --Л rvi t- : i i --:-f rr. /s | -.. C- .. Л V..4.v1 - - . STT 22 и 12 11 . is 9 is s :;: j; A 27 / блок2 контактный синхронный электродвигатель с датчиком положения ротора, смонтированный на полом валу 6, на одном конце которого установлен тормоз, а на другом конце выполнен зубчатый венец 9 центрального зубчатого колеса планетарного редуктора, и выходное звено 22, выполненное полым и жестко связанное с гайкой 16. В полости этого выходного звена расположен винт 15. В части 2 корпуса размещен планетарный редуктор, выходное звено которого посредством переходной втулки связано с винтом 15 основной передачи винт - гайка. В части 3 корпуса размещен блок по- зиционирог.гния, выполненный в виде кронштейна, смонтированного на части 3 корпуса, концевых выключателей 2, установленных с возможностью регулировочного перемещения, и винтовой передачи, винт 26 кот рой кинематически связан посредством стыковочного узла с винтом 15 основной передами винт - гайка, а гайка предназначена для поочередного взаимодействия с концевыми выключателями. 2 ил. Г блохЗ г 19 21 20 J с 19 СД о o N5 Г-геА v} ; ., Г ш Л ,- : rii- - tj 
Для втягивания выходного звена не- 20 выполненное полым и жестко связанное
обходимо реверсировать электродвигатель 4, при этом ползун 27 будет перемещаться в другую сторону.
При достижении выходным звеном крайнего втянутого положения ползун 27 будет взаимодействовать с другим концевым выключателем 2, и произойдет выключение электродвигателя kt положение тормоза и остановка выходного звена.
В качестве двигателя в приводном устройстве применен бесконтактный син- хронный электродвигатель с центральным отверстием в роторе. Это позволяет при рассматриваемой компоновке приводного устройства разместить выходное звено внутри корпуса, что уменьшает его габариты.
Ресурс роботы бесконтактного синхронного двигателя примерно в 8 раз больше ресурса обычного электродвигателя постоянного тока, бесконтактный синхронный двигатель способен длительное время вь деркивать дву- или трехкратные перегрузки, что существенно увеличивает ресурс работы, эксплуатационную надежность и удельную модность приводного устройства. Формула изобретения
35
с гайкой основной передачи, винт которой размещен в полости выходного звена, а во второй части корпуса размещен планетарный редуктор, центральное зубчатое колесо которого смонтировано на другом конце полого вала, а выходное звено редуктора жестко связано с винтом основной передачи, при э.том в третьей части корпуса раз- 30 мещен блок позиционирования, выполнен ный в виде кронштейна, закрепленного в этой части корпуса, кониевых выключателей, установленных на кронштей не с возможностью их регулировочного перемещения, винтовой передачи и направляющей оси, причем винт этой передачи кинематически связан с дополнительно введенным стыковочным узлом, и гайка этой передачи образует поступательную пару с направляющей осью и предназначена для поочередного взаимодействия с концевыми выключате- ля ми.
40
45
50
5
5
с гайкой основной передачи, винт которой размещен в полости выходного звена, а во второй части корпуса размещен планетарный редуктор, центральное зубчатое колесо которого смонтировано на другом конце полого вала, а выходное звено редуктора жестко связано с винтом основной передачи, при э.том в третьей части корпуса раз- 0 мещен блок позиционирования, выполненный в виде кронштейна, закрепленного в этой части корпуса, кониевых выключателей, установленных на кронштейне с возможностью их регулировочного перемещения, винтовой передачи и направляющей оси, причем винт этой передачи кинематически связан с дополнительно введенным стыковочным узлом, и гайка этой передачи образует поступательную пару с направляющей осью и предназначена для поочередного взаимодействия с концевыми выключате- ля ми.
0
5
0
вид А
Фиг.1
| Чернавский С.А.и др | |||
| Проектирование механических передач | |||
| Учебно-справочное пособие для птузов | |||
| Н.: Машиностроение, 1981, с. | |||
| ( ПРИВОДНОЕ УСТРОЙСТВО |
