о
N5
сл о
00
ь.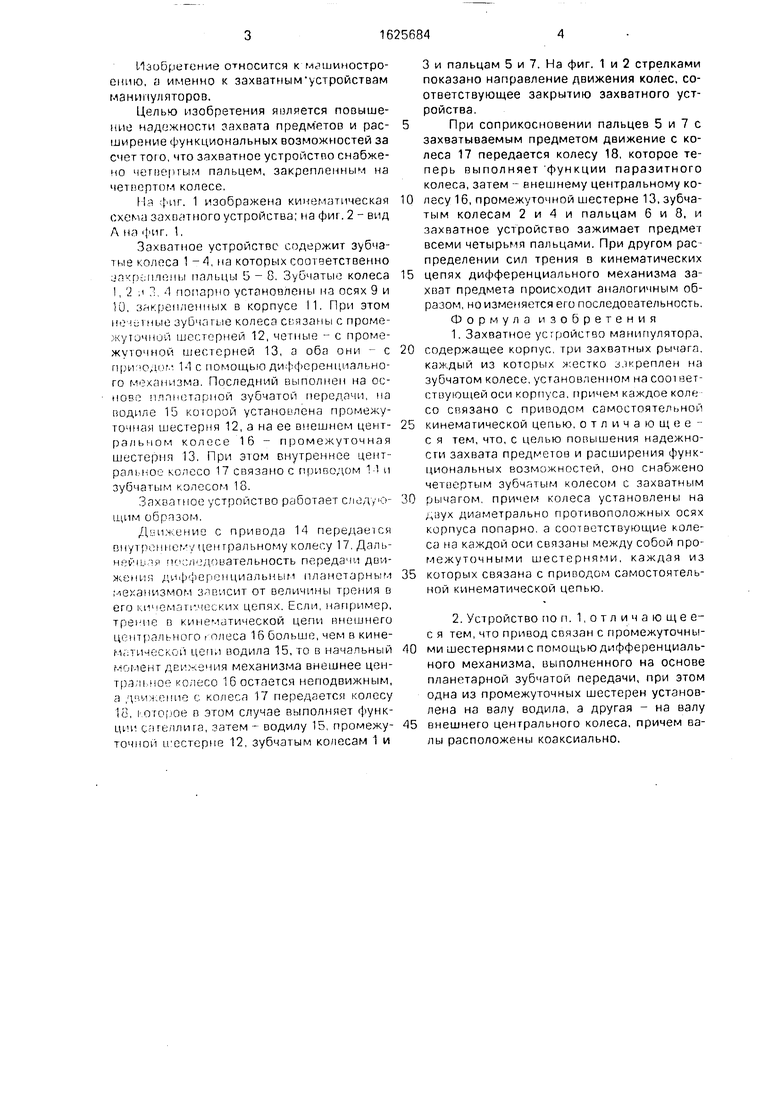
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ПРИВОД ЗАХВАТНОГО УСТРОЙСТВА | 1996 |
|
RU2110721C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| ГАЙКОВЕРТ | 2000 |
|
RU2184026C2 |
| СПОСОБ СВИНЧИВАНИЯ ИЛИ РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2273716C2 |
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| СПОСОБ СВИНЧИВАНИЯ ИЛИ РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086400C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| РАЗДАТОЧНАЯ КОРОБКА АВТОМОБИЛЯ | 1992 |
|
RU2021918C1 |
Изобретение относится к машиностроению. Целью изобретения является повышение надежности захвата предметов и расширение функциональных возможностей за счет введения дополнительного колеса с захватным элементом. Захватное устройство содержит корпус 11, на осях 9 и 10 которого установлены попарно колеса 1, 2 и 3, 4. На каждом колесе жестко закреплены пальцы 5-8. Колеса 1 и 2 связаны между собой через промежуточную шестерню 13, установленную на валу внешнего центрального колеса дифференциального механизма. Колеса 3 и 4 связаны между собой через промежуточную шестерню 13, установленную на водиле 15. Вращение от привода 14 передается колесу 17 Дальнейшая последовательность передачи движения дифференциальным механизмом зависит от величины трения в его кинематических цепях. Если трение в колесе 16 больше, чем в водиле 15, то в начальный момент колесо 16 неподвижно, а движение передается по кинематической цепи 17-18-15-12-1-3-5-7. При соприкосновении пальцев 5 и 7 с деталью движение передается по кинематической цепи 17-18-16-13-2-4-6-8 и захватное устройство зажимает предмет всеми четырьмя пальцами. 1 з. п. ф-лы, 2 ил. (Л С
Фиг.1
в 7
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов.
Целью изобретения является повышение надежности захвата предметов и расширение функциональных возможностей за счет того, что захватное устройство снабжено четвертым пальцем, закрепленным на чет нертом колесе.
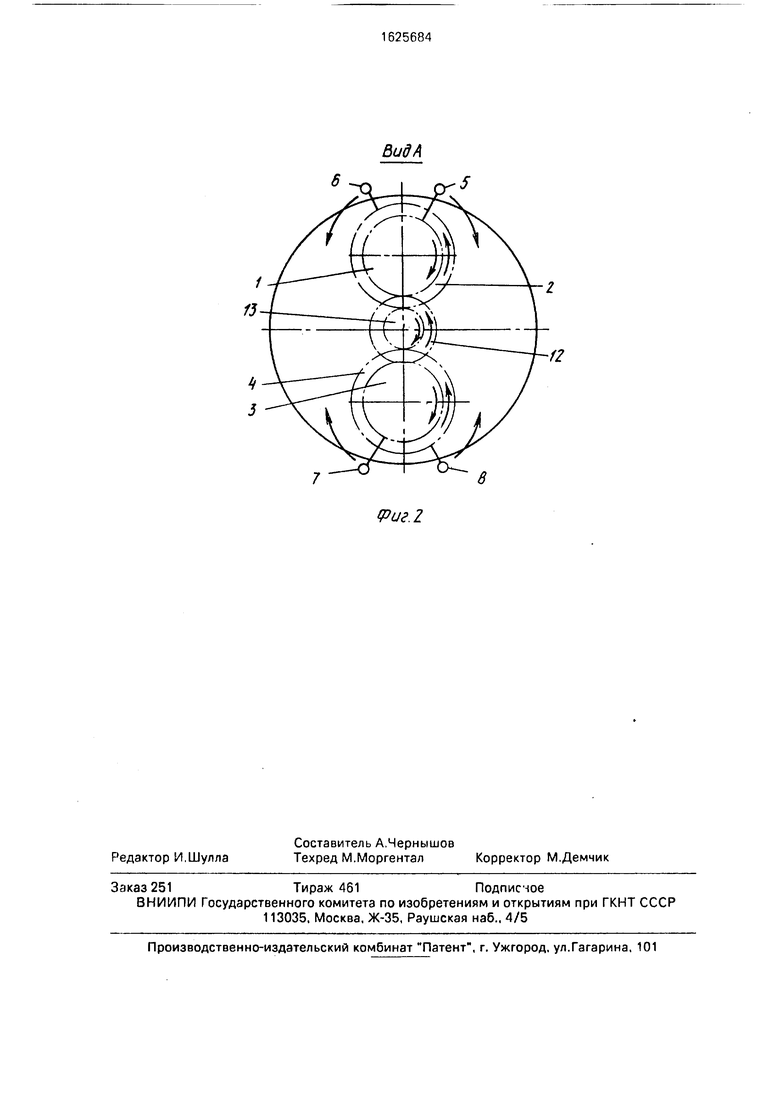
h r,4ir. 1 изображена кинематическая схема захватного устройства; на фиг. 2 - вид Л на фиг. 1.
Захватное устройстве содержит зубчатые колеса 1 -4, на которых соответственно jf- Пс темы пальцы 5-8. Зубчатые колеса , 1 и п 4 попарно установлены на осях 9 и 10, закрепленных в корпусе 11. При этом не ел ные .зубчатые колеса сгчзаны с промежуточный шестерней 12, четные - с промежуточной шестерней 13, а оба они - с при 1о,юг 14 с помощью ди г/ференцмально- го механизма. Последний выполнен на ое- iiOBo тлнетаыюй зубчатой передачи, на водиле 15 коюрой установлена промежуточная шестерня 12, а на ее внешнем центральном колесе 16 - промежуточная шестерня 13. При этом внутреннее централ 1-ое чслесо 17 связано с приводом 1 5 и зубчатым колесом 18.
Захватное устройство работает след/ю щим образом.
ение с привода 14 передается QH/I ронно - , центральному колесу 17 Даль- ъ пп -лодмвательность передачи движения дифференциальным планетарным механизмом зависит от величины трения в его кинематических цепях. Если, например, трение в кинематической цели внешнего цснтрамьного г плеса 16 больше, чем в кине- MI пнесг.си цепи водила 15, то в начапьный момент дЕихения механизма внешнее центра и чор колесо 16 остается неподвижным, а л п1/н пние с колеса 17 передается колесу 1G, i огорое в этом случае выполняет функции счгеллита, затем - водилу 15, промежуточной шестерне 12, зубчатым колесам 1 и
3 и пальцам 5 и 7. На фиг. 1 и 2 стрелками показано направление движения колес, соответствующее закрытию захватного устройства.
При соприкосновении пальцев 5 и 7 с
захватываемым предметом движение с колеса 17 передается колесу 18, которое теперь выполняет функции паразитного колеса, затем - внешнему центральному ко0 лесу 16, промежуточной шестерне 13, зубчатым колесам 2 и 4 и пальцам 6 и 8, и захватное устройство зажимает предмет всеми четырьмя пальцами. При другом рас пределении сил трения в кинематических
5 цепях дифференциального механизма захват предмета происходит аналогичным образом, но изменяется его последооательность. Формула изобретения
каждый из которых жестко откреплен на зубчатом колесе, установленном на соот вет- ствующей оси корпуса, причем каждое коле со связано с приводом самостоятельной
5 кинематической цепью, отличающее - с я тем, что, с целью повышения надежности захвата предметов и расширения функциональных возможностей, оно снабжено четертым зубчатым колесом с захватным
0 рычагом причем колеса установлены на лвух диаметрально противоположных осях корпуса попарно а соответствующие колеса на каждой оси связаны между собой промежуточными шестернями, каждая из
5 которых связана с приводом самостоятельной кинематической цепью.
5 внешнего центрального колеса, причем валы расположены коаксиально.
| Бурдаков С.Ф., Дьяченко В Л | |||
| Тимофеев А.Н | |||
| Проектирование манипуляторов промышленных роботов и роботизированных комплексов | |||
| Учебное пособие для студентов оузов | |||
| - М: Высшая школа, 1986 | |||
| с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
