Изобретение относится к измерительной технике и может быть использовано для контроля сферических и близких к ним поверхностей, а именно внутренней поверхности экрана кинескопа.
Целью изобретения является повышение точности измерения за счет надежного базирования экрана кинескопа и конструктивного выполнения привода перемещения штанги.
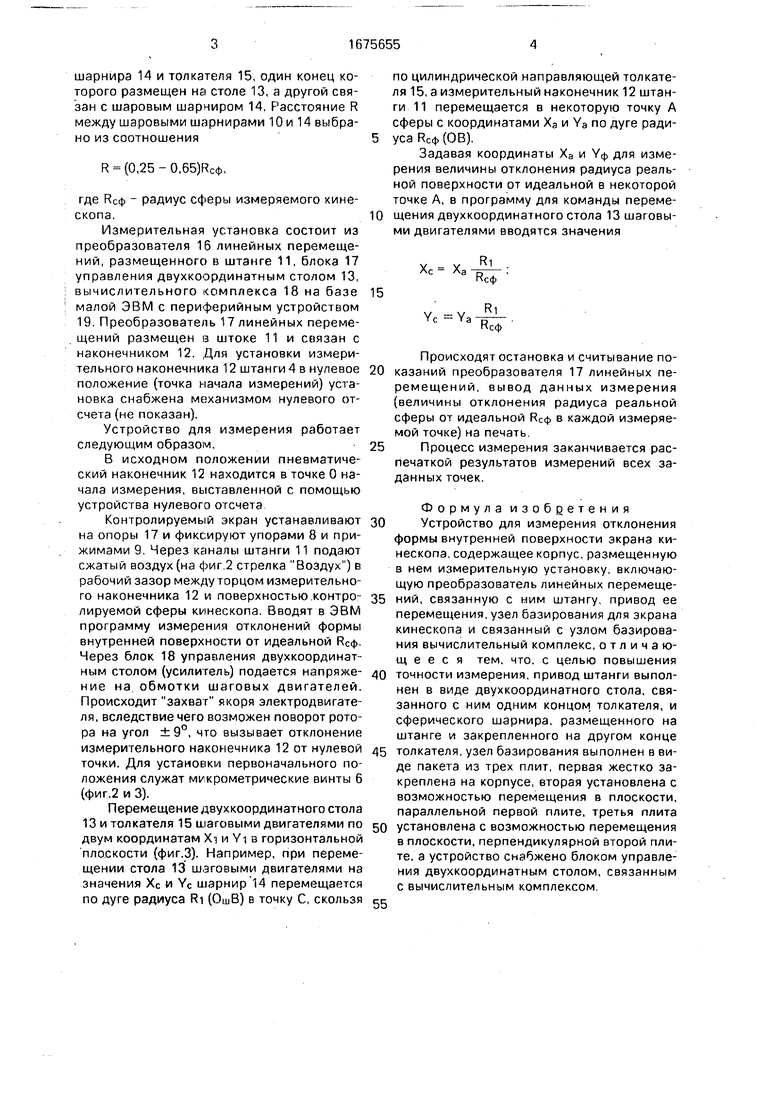
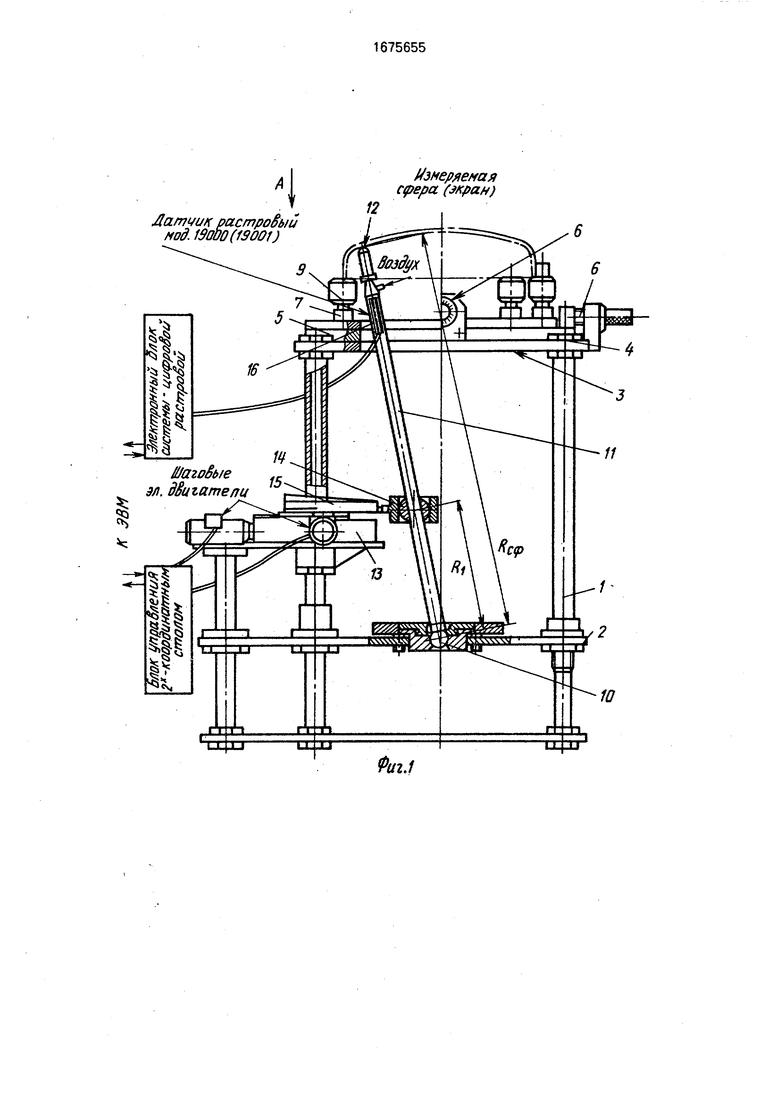
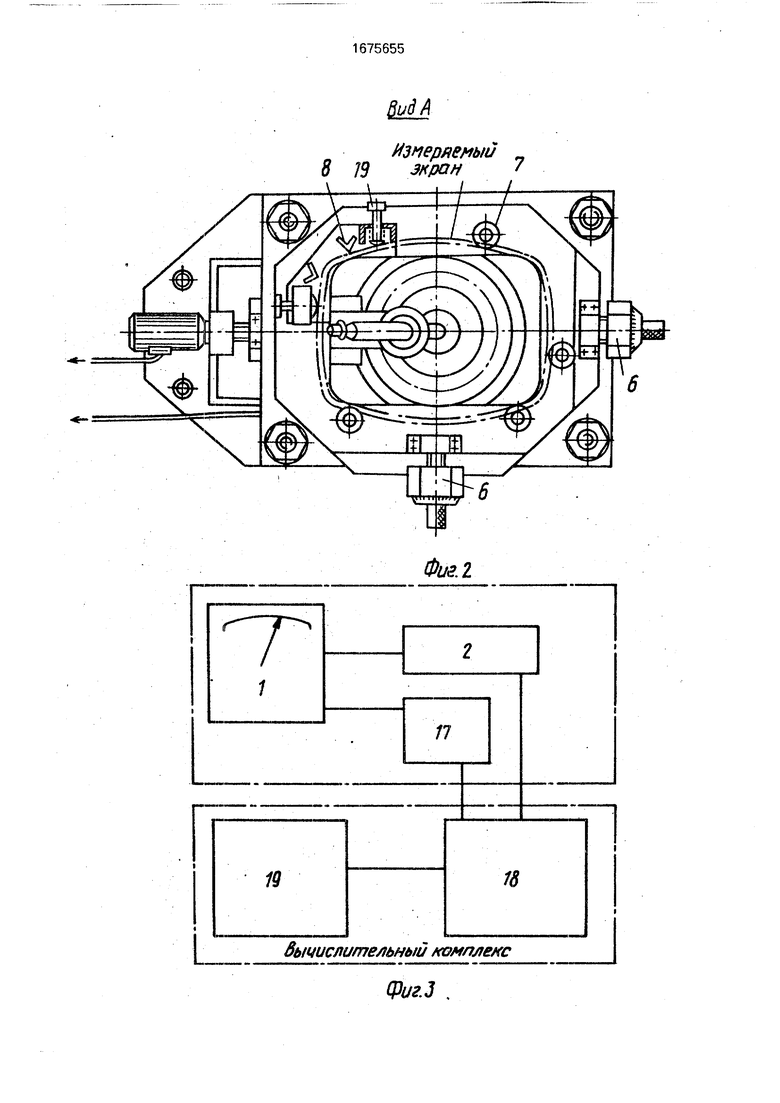
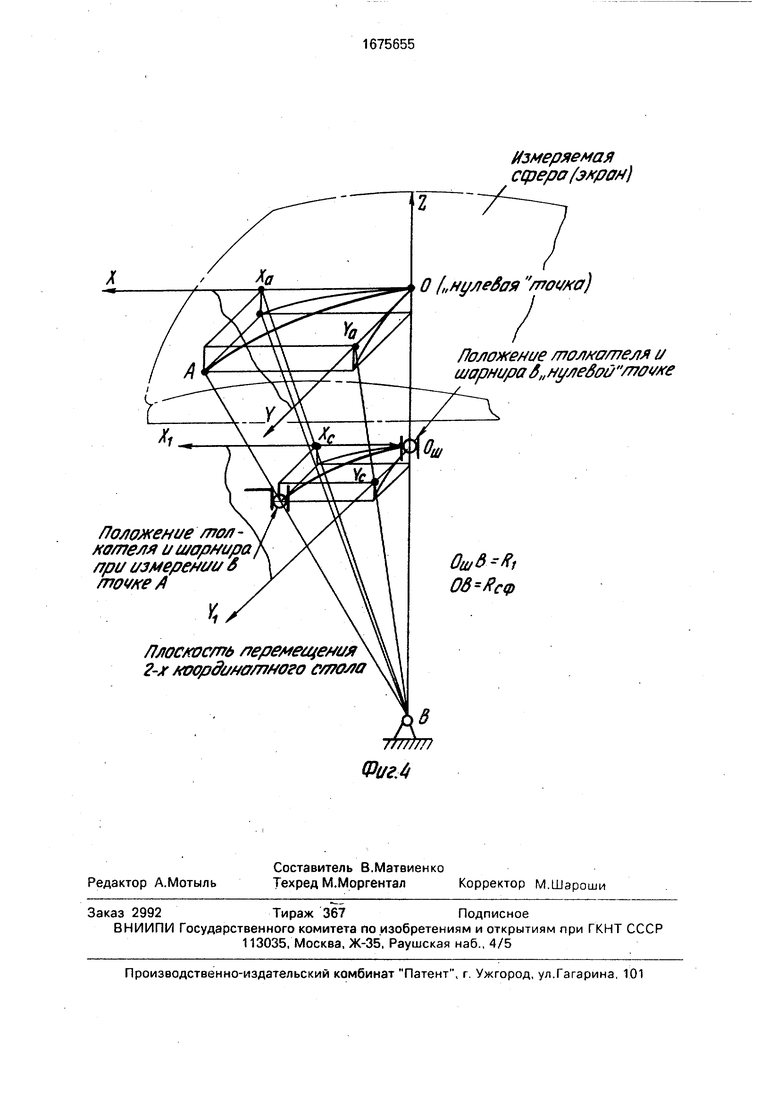
Нафиг.1 схематически представлено устройство для измерения; на фиг.2 - вид А на фиг.1; на фиг.З - блок-схема устройства; на фиг.4 - схема расчета координат перемещения толкателя.
Устройство .для измерения отклонения формы внутренней поверхности экрана кинескопа содержит корпус 1 с базовой поверхностью 2, узел базирования для экрана кинескопа, выполненный в виде пакета плит, одна плита 3 жестко закреплена на корпусе, другая плита 4 - с возможностью
перемещения в плоскостей, параллельной плите 3 (по оси X), третья плита 5 установлена с возможностью перемещения в плоскости, перпендикулярной второй плите 4 (по оси У) посредством двух микрометрических винтов 6 четырех опор 7, двух упоров 8 и прижимов 9. установленных на плите 5.
На базовой поверхности 2 корпуса кон- сольно с помощью шарового шарнира 10 установлена штанга 11 с возможностью качания, на свободном конце которой встроен пневматический наконечник 12с возможностью возвратно-поступательного перемещения вдоль оси штанги 11.
Внутри корпуса 1 на стойках расположен привод перемещения штанги 11, выполненный в виде двухкоординатного стола 13 сгдвумя шаговыми электродвигателями с редукторами, которые перемещают стол в го- ризонтальной плоскости. Штанга 11 связана со столом 13 посредством шарового
(Л
о
чд
СЛ О СЛ
ел
шарнира 14 и толкателя 15, один конец которого размещен на столе 13, а другой связан с шаровым шарниром 14, Расстояние R между шаровыми шарнирами 10 и 14 выбрано из соотношения
R (0,25-0.65)Rc4.
где Неф - радиус сферы измеряемого кинескопа.
Измерительная установка состоит из преобразователя 16 линейных перемещений, размещенного в штанге 11, блока 17 управления двухкоординатным столом 13, вычислительного комплекса 18 на базе малой ЭВМ с периферийным устройством 19. Преобразователь 17 линейных перемещений размещен в штоке 11 и с наконечником 12, Для установки измерительного наконечника 12 штанги 4 в нулевое положение (точка начала измерений) установка снабжена механизмом нулевого отсчета (не показан).
Устройство для измерения работает следующим образом.
В исходном положении пневматический наконечник 12 находится в точке 0 начала измерения, выставленной с помощью устройства нулевого отсчета
Контролируемый экран устанавливают на опоры 17 и фиксируют упорами 8 и прижимами 9. Через каналы штанги 11 подают сжатый воздух (на фиг.2 стрелка Воздух) в рабочий зазор между горцем измерительного наконечника 12 и поверхностью .контролируемой сферы кинескопа. Вводят в ЭВМ программу измерения отклонений формы внутренней поверхности от идеальной RC(j. Через блок 18 управления двухкоординатным столом (усилитель) подается напряжение на обмотки шаговых двигателей. Происходит захват якоря электродвигателя, вследствие чего возможен поворот ротора на угол ±9°, что вызывает отклонение измерительного наконечника 12 от нулевой точки. Для устаноЕ1ки первоначального положения служат микрометрические винты 6 (фиг.2 и 3).
Перемещение двухкоординатного стола 13 и толкателя 15 шаговыми двигателями по двум координатам Хч и YI в горизонтальной плоскости (фиг.З). Например, при перемещении стола 13 шаговыми двигателями на значения Хс и Yc шарнир 14 перемещается по дуге радиуса RI (ОшВ) в точку С, скользя
по цилиндрической направляющей толкателя 15, а измерительный наконечник 12 штанги 11 перемещается в некоторую точку А сферы с координатами Ха и Ya по дуге радиуса Rc4 (OB).
Задавая координаты Ха и Уф для измерения величины отклонения радиуса реальной поверхности от идеальной в некоторой точке А, в программу для команды перемещения двухкоординатногостола 13 шаговыми двигателями вводятся значения
Хс - Хя
Ri
Чс Ла Рсф Ri
Ус Уг
Рсф
Происходят остановка и считывание по- казаний преобразователя 17 линейных перемещений, вывод данных измерения (величины отклонения радиуса реальной сферы от идеальной ВСф в каждой измеряемой точке) на печать.
Процесс измерения заканчивается распечаткой результатов измерений всех заданных точек.
Формула изобретения
Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа, содержащее корпус, размещенную в нем измерительную установку, включающую преобразователь линейных перемещений, связанную с ним штангу, привод ее перемещения, узел базирования для экрана кинескопа и связанный с узлом базирования вычислительный комплекс, отличающееся тем, что, с целью повышения
точности измерения, привод штанги выполнен в виде двухкоординатного стола, связанного с ним одним концом толкателя, и сферического шарнира, размещенного на штанге и закрепленного на другом конце
толкателя, узел базирования выполнен в виде пакета из трех плит, первая жестко закреплена на корпусе, вторая установлена с возможностью перемещения в плоскости, параллельной первой плите, третья плита
установлена с возможностью перемещения в плоскости, перпендикулярной второй плите, а устройство снабжено блоком управления двухкоординатным столом, связанным с вычислительным комплексом.
(
Датчик растроен и мод. 19000(1900)
12
Измеряемая срера (экfan)
10
Вид А
Изнеряеный 8 Ю мрвн 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1990 |
|
SU1753238A1 |
| Способ измерения кривизны внутренней поверхности экрана кинескопа | 1986 |
|
SU1415031A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ | 1970 |
|
SU270099A1 |
| Устройство для измерения отклонения формы внутренних сферических поверхностей | 1987 |
|
SU1522020A1 |
| ИЗМЕРИТЕЛЬНАЯ ГОЛОВКА К ТВЕРДОМЕРУ БРИНЕЛЛЯ ДЛЯ РЕГИСТРАЦИИ НАГРУЗКИ И ГЛУБИНЫ ВДАВЛИВАНИЯ | 2005 |
|
RU2320974C2 |
| Устройство для измерения параметров внутренних сфер | 1989 |
|
SU1698620A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНЫХ РАЗМЕРОВ ПАРАМЕТРОВ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ И РАДИУСОВ СФЕРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2188388C2 |
| КООРДИНАТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1985 |
|
SU1840370A1 |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ РАДИУСОВ ВНУТРЕННЕЙ СФЕРЫ ЦВЕТНОГО КИНЕСКОПА | 1967 |
|
SU196373A1 |
| СФЕРОМЕТР УНИВЕРСАЛЬНЫЙ МОТОРИКИНА Г.П. | 2001 |
|
RU2198378C2 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерения. Узел базирования выполнен в виде пакета плит: одна плита жестко закреплена на корпусе, другая установлена с возможностью перемещения в плоскости, параллельной первой плите, а третья плита установлена с возможностью перемещения в плоскости, перпендикулярной второй плите. Привод штанги перемещения выполнен в виде двухкоординатного стола, закрепленного на нем толкателя и сферического шарнира, размещенного на штанге и связанного с толкателем. 4 ил.
19
L
бьщислительный комплекс Фиг.З .
Фиг. Z
TI
18
Положение толкателя и шарнира яри измерении & то we A
у,
Плоскость перемещения 2-х координатного с/яо/ю
Измеряемая сфера/эхран)
О /„нулебая тома)
Положение толкателя t/ шарнира Ј„нуле60й т0ме
Ош$ Ri
| Устройство для измерения отклонения формы внутренних сферических поверхностей | 1987 |
|
SU1522020A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
