С
1чд hd
11 с хфорезями на стенке. Внутри штанги 14 установлен преобразователь линейных перемещений, соединенный с наконечником 16 и через узел ввода информации с вычислительным узлом В рабочий зазор между торцом наконеч ника 16 и поверхностью контролируемого изделия 18 подают сжатый воздух Приводят во вращение узел качания штанги 14, который через копир 12 и штангу 14 сообщает сложное перемещение в виде спирали наконечнику 16, который при наличии погрешности выполнения формь: контролируемого из- делил 18 за счет изкенения давления
воздуха в рабочем зазоре подает не- прерывный сигнал через преобразователь линейных перемещений в узел ввода информации. Сигнал фиксируется в моменты прохождения прорезями стакана 11 луча меж;цу фотодиодом 20 и осветителем 21 и периодически поступает через усилительно-регистрирующую аппаратуру в вычислительный узел. Величина погрешности фиксируется по точкам считывания результатов измерения и в цифровом виде выдается на экране АЦПУ вычислительного узла, 1 з.п. ф-лы, 8 ил.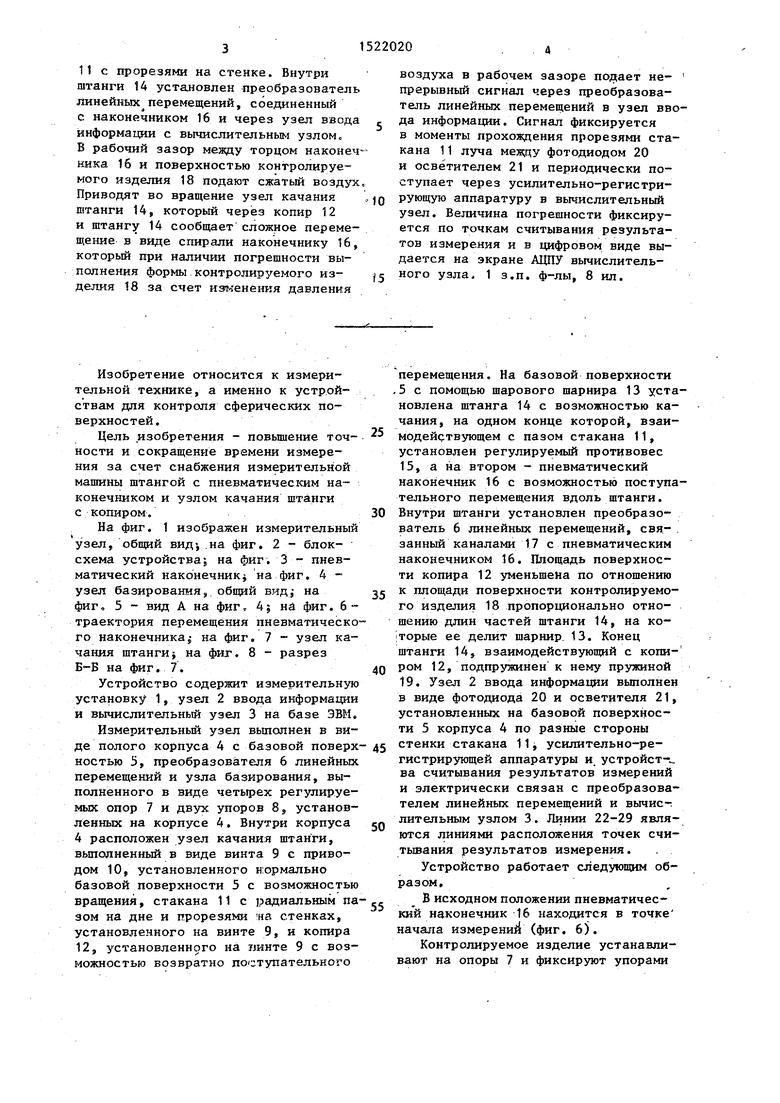
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1989 |
|
SU1675655A1 |
| Устройство для контроля глубины отверстий | 1988 |
|
SU1620801A1 |
| УСТРОЙСТВО для ВВОДА в ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ КООРДИНАТ ТОЧЕК КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙДЕТАЛЕЙ | 1970 |
|
SU273446A1 |
| Устройство для измерения параметров внутренних сфер | 1989 |
|
SU1698620A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОФИЛЕЙ СЕЧЕНИЙ ФАСОННЫХ ДЕТАЛЕЙ | 1990 |
|
RU2016371C1 |
| Станок для электроискровой обработки внутренних цилиндрических поверхностей | 1988 |
|
SU1657308A1 |
| Устройство для поэлементного контроля зубчатых колес | 1980 |
|
SU1242705A1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2010 |
|
RU2431113C1 |
| Устройство для бесконтактного измерения профиля полированных поверхностей | 1983 |
|
SU1186942A1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности и сокращение времени измерения. Устройство снабжено полой штангой 14 с пневматическим наконечником 16 и узлом качания штанги 14 с копиром 12, взаимодействующим со штангой 14, и стаканом 11 с прорезями на стенке. Внутри штанги 14 установлен преобразователь линейных перемещений, соединенный с наконечником 16 и через узел ввода информации с вычислительным узлом. В рабочий зазор между торцом наконечника 16 и поверхностью контролируемого изделия 18 подают сжатый воздух. Приводят во вращение узел качания штанги 14, который через копир 12 и штангу 14 сообщает сложное перемещение в виде спирали наконечнику 16, который при наличии погрешности выполнения формы контролируемого изделия 18 за счет изменения давления воздуха в рабочем зазоре подает непрерывный сигнал через преобразователь линейных перемещений в узел ввода информации. Сигнал фиксируется в моменты прохождения прорезями стакана 11 луча между фотодиодом 20 и осветителем 21 и периодически поступает через усилительно-регистрирующую аппаратуру в вычислительный узел. Величина погрешности фиксируется по точкам считывания результатов измерения и в цифровом виде выдается на экране АЦПУ вычислительного узла. 1 з.п. ф-лы, 8 ил.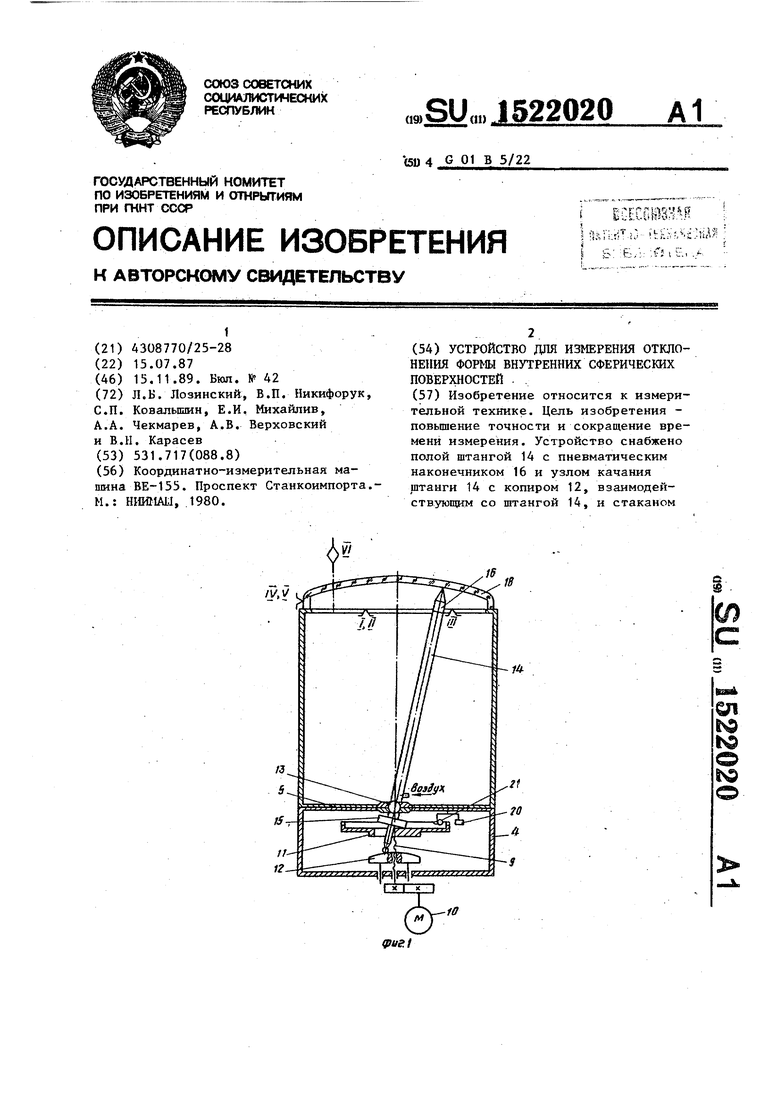
Изобретение относится к измерительной технике, а именно к устройствам для контроля сферических поверхностей.
Цель изобретения - повьдцение точ- ности и сокращение времени измерения за счет снабжения измерительной машины штангой с пневматическим наконечником и узлом качания штанги с копиром,
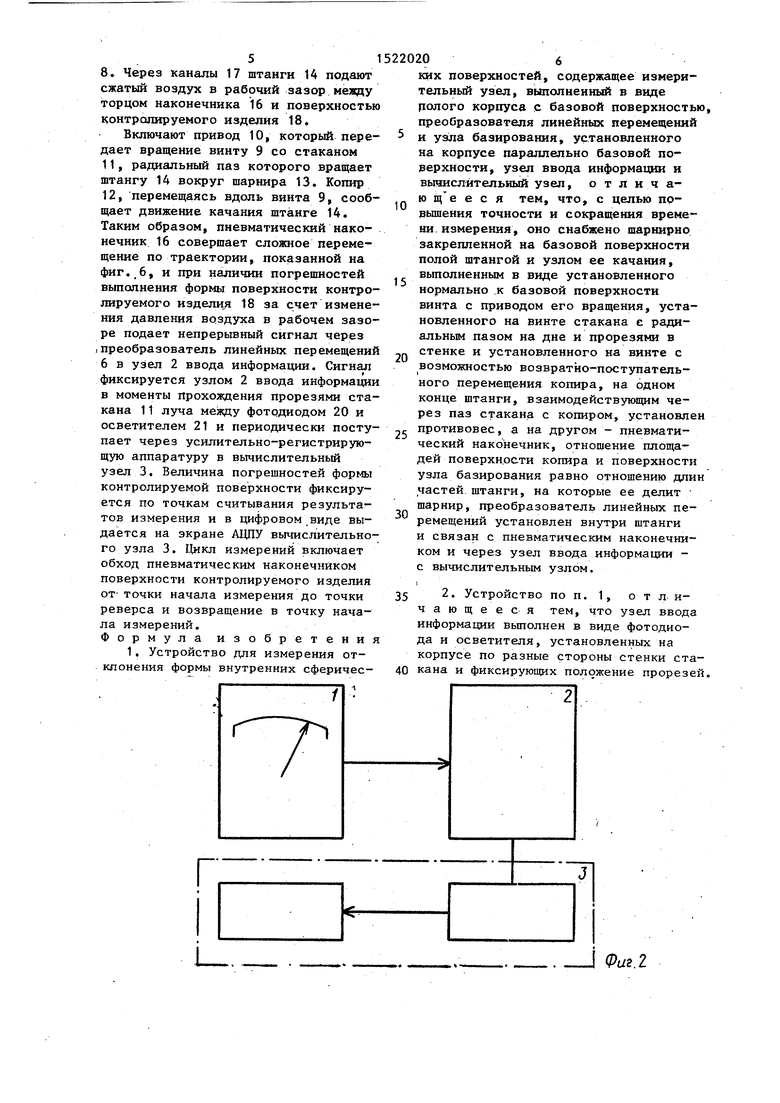
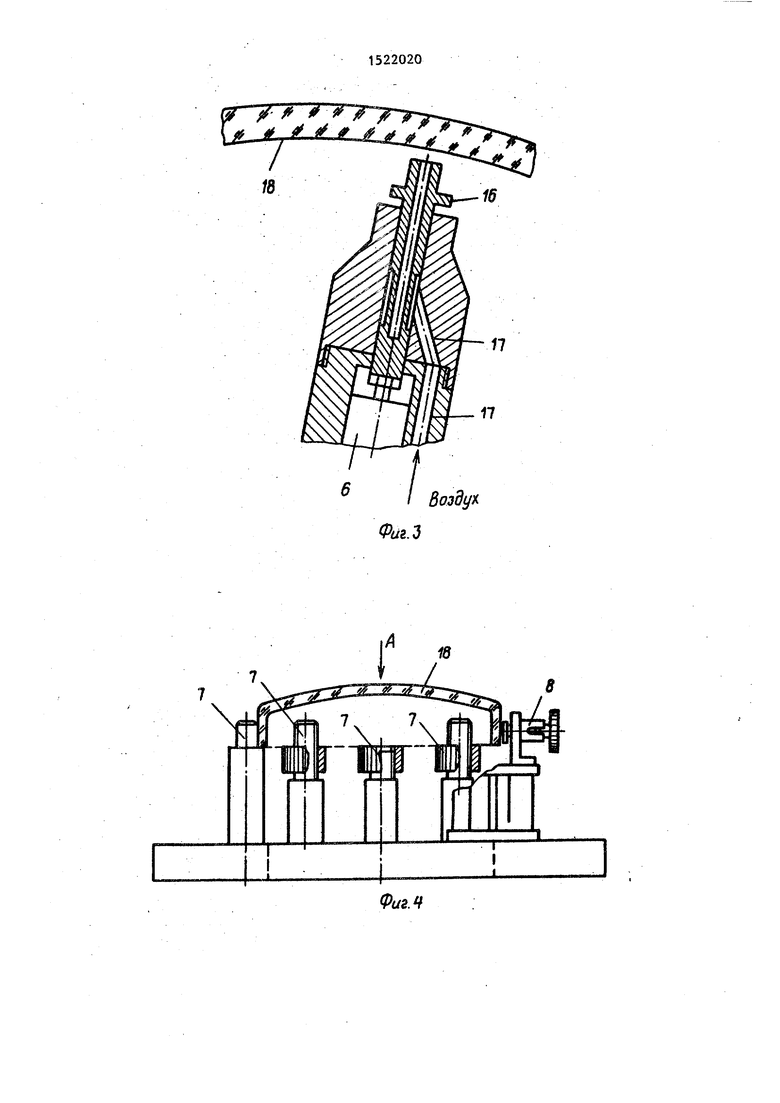
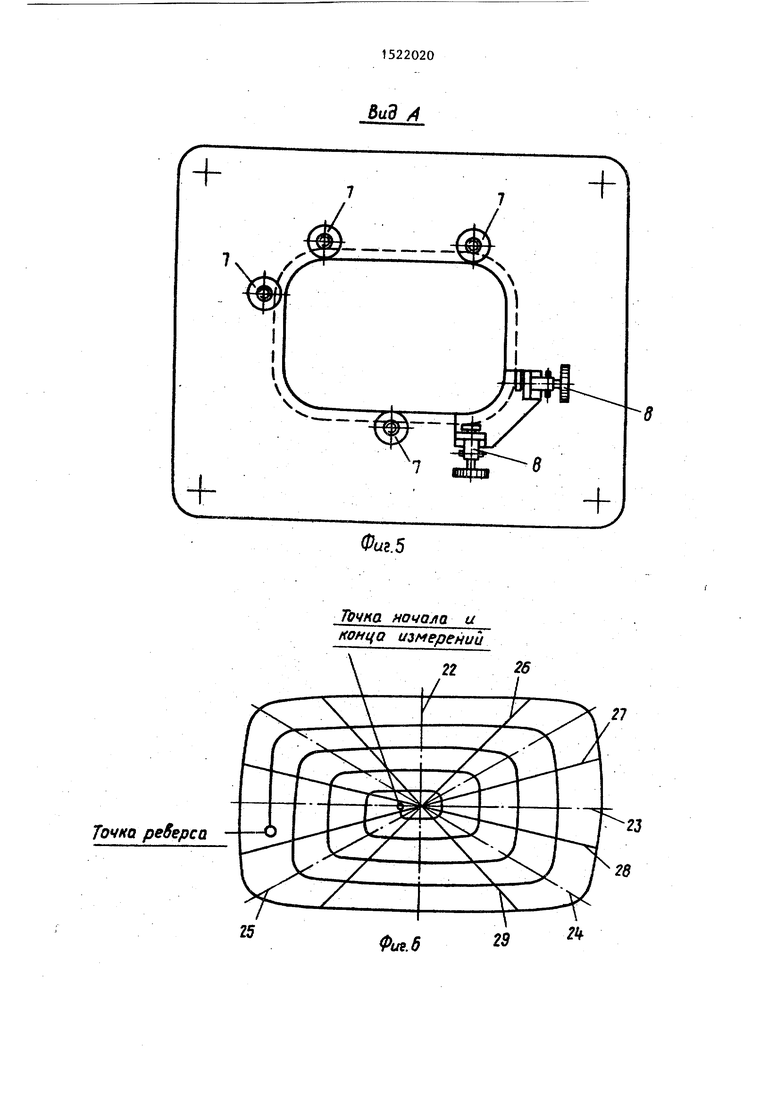
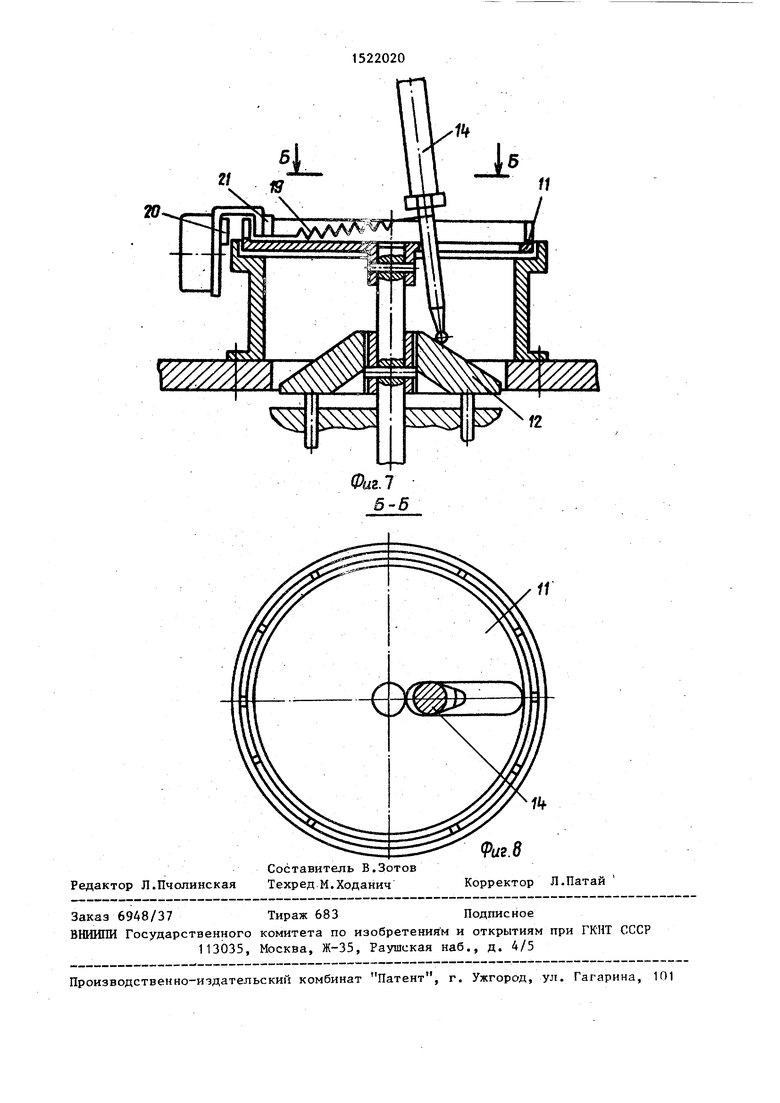
На фиг. 1 изображен измерительный узел, общий вид, на фиг. 2 - блок- схема устройстваJ на фиг. 3 - пневматический наконечникJ на фиг. 4 - узел базирования, общий вид; на фиг, 5 - вид А на фиг, 4; ни фиг. 6 - траектория перемещения пневматическо го наконечника; на фиг. 7 - узел качания штанги} на фиг. В - разрез Б-Б на фиг. 7.
Устройство содержит измерительную установку 1, узел 2 ввода информации и вычислительный узел 3 на базе ЭВМ.
Измерительный узел вьшолнен в виде полого корпуса 4 с базовой поверх ностью 5, преобразователя 6 линейных перемещений и узла базирования, выполненного в виде четырех регулируемых опор 7 и двух упоров 8j установленных на корпусе 4. Внутри корпуса 4 расположен узел качания штанги, вьшолненный в виде винта 9 с приводом 10, установленного нормально базовой поверхности 5 с возможностью вращения, стакана 11 с радиальным па зом на дне и прорезями на стенках, установленного на винте 9, и копира 12, установленного на пинте 9 с возможностью возвратно поступательного
перемещения. На базовой поверхности .5 с помощью шарового шарнира 13 установлена штанга 14 с возможностью качания, на одном конце которой, взаимодействующем с пазом стакана 11, установлен регулируемый противовес 15, а на втором - пневматический наконечник 16 с возможностью поступательного перемещения вдоль штанги. Внутри штанги установлен преобразователь 6 линейных перемещений, связанный каналами 17 с пневматическим наконечником 16. Площадь поверхности копира 12 уменьшена по отношению к площади поверхности контролируемого изделия 18 пропорционально отношению длин частей штанги 14, на ко- |торые ее делит шарнир. 13. Конец штанги 14, взаимодействующий с копиром 12, подпружинен к нему пружиной 19. Узел 2 ввода информации выполнен в виде фотодиода 20 и осветителя 21, установленных на базовой поверхности 5 корпуса 4 по разные стороны стенки стакана 11, усилительно-регистрирующей аппаратуры и. устройст- ва считывания результатов измерений и электрически связан с преобразователем линейных перемещений и вычис-г лительным узлом 3. Линии 22-29 являются линиями расположения точек считывания результатов измерения.
Устройство работает следующим образом,
В исходном положении пневматический наконечник 16 находится в точке начала измерени (фиг. 6).
Контролируемое изделие устанавливают на опоры 7 и фиксируют упорами
Включают привод 10, который передает вращение винту 9 со стаканом
11,радиальный паз которого вращает штангу 14 вокруг шарнира 13. Копир
12,перемещаясь вдоль винта 9, сообщает движение качания штанге 14. Таким образом, пневматический наконечник 16 совершает сложное перемещение по траектории, показанной на фиг..6, и при наличии погрешностей выполнения формы поверхности контролируемого издели.я 18 за счет изменения давления воздуха в рабочем зазоре подает непрерывный сигнал через
.преобразователь линейных перемещений 6 в узел 2 ввода информации. Сигнал фиксируется узлом 2 ввода информации в моменты прохождения прорезями стакана 11 луча между фотодиодом 20 и осветителем 21 и периодически поступает через усилительно-регистрирующую аппаратуру в вычислительный узел 3. Величина погрешностей формы контролируемой поверхности фиксируется по точкам считывания результатов измерения и в цифровом ,виде выдается на экране АЦПУ вычислительного узла 3. Цикл измерений включает обход пневматическим наконечником поверхности контролируемого изделия от- точки начала измерения до точки реверса и возвращение в точку начала измерений. Формула изобретени
5
0
5
0
5
0
ких поверхностей, содержащее измерительный узел, выполненный в виде цолого корпуса с базовой поверхностью, преобразователя линейных перемещений и узла базирования, установленного на корпусе параллельно базовой поверхности, узел ввода информации и выиислйтепьный узел, отличающееся тем, что, с целью пр- вышения точности и сокращения времени измерения, оно снабжено шарнирно закрепленной на базовой поверхности полой штангой и узлом ее качания, вьтолненным в виде установленного нормально .к базовой поверхности винта с приводом его вращения, установленного на винте стакана с радиальным пазом на дне и прорезями в стенке и установленного на винте с возможностью возвратйо-постзшатель- ного перемещения копира, на одном конце штанги, взаимодействующим через паз стакана с копиром, установлен противовес, а на другом - пневматический наконечник, отношение площадей поверхности копира и поверхности узла базирования равно отношению длин частей, штанги, на которые ее делит шарнир, преобразователь линейных перемещений установлен внутри штанги и связан с пневматическим наконечником и через узел ввода информации - с вычислительным узлом. 1
Фи.г
п
п
Воздух.
Фиг.З
8
Фиг. Ч
-I-ь
ТЬчна начала а конца измерении
Точна реверса
25
Вид /Г
в
Фиг. 5
26
21
Фи9.6
Редактор Л.Пчолинская
Составитель В.Зотов Техред.М.Ходанич
fV
Раг.8
Корректор Л.Патай
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Проспект Станкоимпорта.- М.: НИИНАШ, 1980. | |||
