ел
о со
Изобретение относится к машиностроению и может быть использовано при производстве экранов кинескопов для измерения кривизны их внутренней поверхности.
Цель изобретения - повышение точное- ти и удобства измерений путем возможного смеш,ения центра поворота измерительного преобразователя относительно центра измеряемой поверхности.
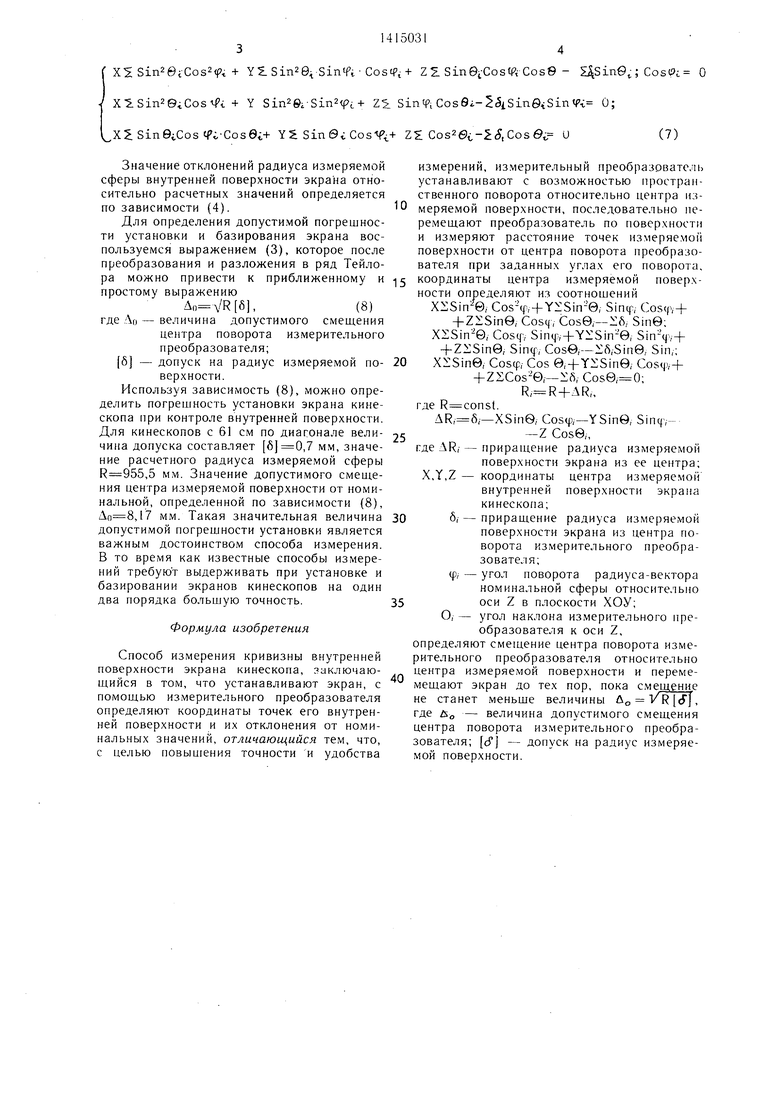
На фиг. 1 показана схема измерения кря- визны внутренней поверхности экрана кинескопа; на фиг. 2 - упрощенная схема измерительной установки лтля реализации способа измерений.
При контроле экрана 1 кинескопа он устанавливается на базовые поверхности измерительной ман1ины. Внутренняя измеряемая поверхность 2 экрана (кинескопа) выно;н1с- на с радиусом R-j-.VR,. Величина радиуса измеряемой поверхности определена значением расчетного радиуса R, экрана кинескопа и величино.й AR, переменной для различных i-x точек экрана.
Измерительп1)1Й преобразователь 3 установлен с возможностью пространственного поворота на конпе качаюнц йся штанги 4 относительно центра измеряемой поверхности 2, последовательно перемешают преобразователь 3 но поверхности и измеряют расстояние точек измеряемой поверхности от центра поворота преобразователя 3 iipii заданных yr:iax его поворота.
Измерительная установка содержит качающуюся штангу 4, выполненную с радиусом R + ft , причем размеры штанги постоянны, но се верхняя часть выполнена с измс- рительн1 1м преобразователем, который размешен па всличипе расчетного радиуса R от центра О и имеет перемещения вдоль шташ и 4 на вс.|ичины 6/ д.-т разных точек измерепия.
Рассмотрим две сферические поверхности одну с центром О, принадлежащую измери0
5
0
5
0
5
тельной установке, называемую номинальной сферой, с радиусом R+S, и реальную сферу с центром О и радиусом R-f ДК. Центр О реальной сферы всегда смешен относительно центра О. Выбираем систему координат с началом в точке О и расположением осей, показанных на фиг. 1.
Выразив через параметры номинальной сферы координаты произвольной точки К,, получаем следующие зависимости X, (R + 6,-) Sine, Cos(p,; P,:(R + 6,.) Sine Sinif,;(1)
Zi(R + fi.O Cos9,.
где X,.if,, Z,,-- координаты точки К,, измеряемой внутренней поверхности экрана кинескопа; R - расчетный радиус внутренней поверхности экрана, заданной чертежом;
( - нрирашенис радиуса измеряемой новерхности экрана из центра поворота измерительного преобразователя; О- угол наклона измерительного
преобразователя к оси Z; ((, - угол поворота радиуса-вектора номинальной сферы относительно оси Z в плоскости ХОТ.
Расстояние O|K,, определяюнлее величину радиуса реальной сферы, записываем в коордипатпо форме для выбранных прямо- уго.чьных координат
()(X,--X)-+{Y,--У)Ч+ (Z,-Z) (2)
где X, Y, Z-----координаты центра 0| измеряемой внутренней поверхности экрана;
AR,---- приращение радиуса 1- зл1еряе- мой юверхности экрана из ее центра.
Из выражения (2), подставив Х„ Y,, Z, из (1) в (2), получаем значение .AR, пере- MOinioro д, 1я точек К, поверхности экрана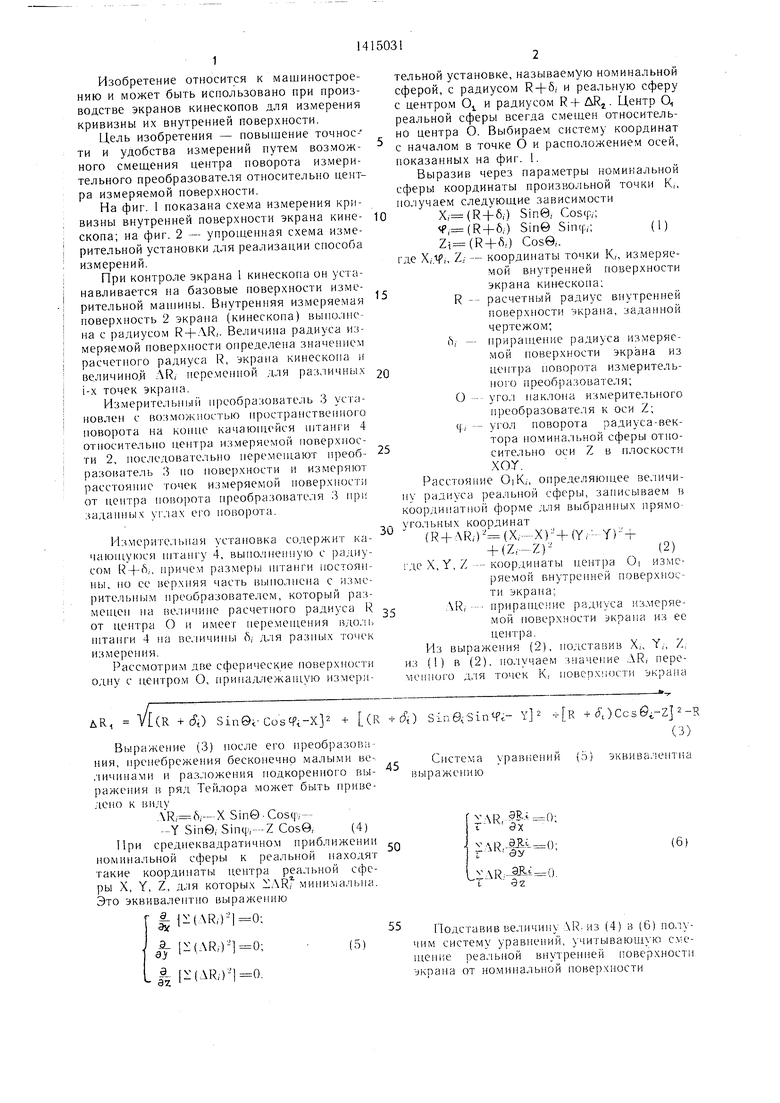
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения формы сферической поверхности изделий | 1989 |
|
SU1668850A1 |
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1989 |
|
SU1675655A1 |
| Стеклоформующий инструмент | 1984 |
|
SU1168519A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕНТРА И РАДИУСА ЦИЛИНДРИЧЕСКИХ УЧАСТКОВ ДЕТАЛЕЙ | 2014 |
|
RU2581384C1 |
| Способ обработки отверстий с наклонной образующей | 1990 |
|
SU1803278A1 |
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОПЕРЕЧНЫХ СЕЧЕНИЙ НА КРУГЛОМЕРАХ | 2016 |
|
RU2637368C1 |
| Оптико-электронное устройство для бесконтактного измерения профиля полированных поверхностей | 1988 |
|
SU1696862A1 |
| Способ получения разверток деталей швейных изделий | 1987 |
|
SU1553041A1 |
| ВИДЕОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ ВНУТРЕННЕЙ ВЕРТИКАЛЬНОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2584370C2 |
Изобретение относится к машиностроению и может быть использовано при производстве экранов кинескопов для измерения их внутренней поверхности. Целью изобретения является повьииение точности и удобства измерений. При способе измерений кривизны внутренней повер.хности экрана кинескопа используют измерительную установку с- измерительным преобразователем с радиусом поворота R + 6,. Измеряемую поверхность радиусом R-|-AR, устанавливают с допустимой погрешностью базирования. Определяют координаты X, У. Z центра измеряемой внутренней поверхности экрана и значения прирашений радиуса AR, измеряемой поверхности внутренней поверхности экрана. Допустимую погрешность установки и базирования экрана устанавливают по зависимости б, где А(1 - допустимое смешение центра поворота измерительного преобразователя; R - расчетное значение радиуса измеряемой поверхности; 6 - допуск на радиус измеряемой поверхности. 2 ил. i сл
AR
, vi
(R +(5,) Sin9i-Cos4 -X 2 + (R -rd) Siii0,-Sin4 - Y
Выражение (3) после его преобразова ния, ирепебрежения бесконечно малыми ве- .1ичинами и раз;1ожения подкоренного вы- раже1шя в ряд Тейлора может быть приведено к виду
.R, 6, Sin0.Cos(i:,- -Y Sine, Sinq.,Z CosQ,(4)
При среднеквадратичном приближении номинальной сферы к реальной находят такие координаты центра реальной сферы X, Y, Z, для которых XARf минимальна. Это эквивалентно выражению
|iX(AR,)
:(AR,) 0.
V ( л р.
+t5 ,)Ccs0i-Z 2-R (3)
45
Система выражению
уравнений (о) эквивалентна
VAR, Ш 0- 1од
-AR,();
,,8R.i ,(). L Эг
(6)
55
Подставив величину . из (4) в (6) получим систему уравпений, учитываюшч ю c.ve- шепие реа., 1ьной внутренней поверхности экрана от номинальной поверхности
1415031 34
XS Sin ei Cos f + YESin e Sinfi-СозФ, + Z2. SineiCosfft Cos8 - Д31п0 ; Cos(3i 0 X:5.Sin2GiCosM i + Y Sin2ei-Sin2 pc + Z Sintp Cos0i-55iSin0tSLn Vi 0; XSiSineiCos tfi-Cosei+ YS 31п0гСоз + ,Cos0 U(7)
Значение отклонений радиуса измеряемой сферы внутренней поверхности экрана относительно расчетных значений определяется по зависимости (4).
Для определения допустимой погрешности установки и базирования экрана воспользуемся выражением (3), которое после преобразования и разложения в ряд Тейлора можно привести к приближенному и простому выражению
,(8)
где АО - величина допустимого смещения центра поворота измерительного преобразователя;
б - допуск на радиус измеряемой поверхности.
Используя зависимость (8), можно определить погрешность установки экрана кинескопа при контроле внутренней поверхности. Для кинескопов с 61 см по диагонале величина допуска составляет б 0,7 мм, значение расчетного радиуса измеряемой сферы ,5 мм. Значение допустимого смешения центра измеряемой поверхности от номинальной, определенной по зависимости (8), ,Г7 мм. Такая значительная величина допустимой погрешности установки является важным достоинством способа измерения. В то время как известные способы измерений требуют выдерживать при установке и базировании экранов кинескопов на один два порядка большую точность.
Формула изобретения
Способ измерения кривизны внутренней поверхности экрана кинескопа, заключающийся в том, что устанавливают экран, с помошью измерительного преобразователя определяют координаты точек его внутренней поверхности и их отклонения от номинальных значений, отличающийся тем, что, с целью повышения точности и удобства
0
5
0
5
0
5
0
измерений, измерительный преобразователь устанавливают с возможностью пространственного поворота относительно центра измеряемой поверхности, пос.тедовательно перемещают преобразователь по поверхности и измеряют расстояние точек измеряемой поверхности от центра поворота преобразователя при заданных углах его поворота, координаты центра измеряемой поверхности определяют из соотношений Xi:Sin% Cos-V+Y Sin-0, Sin,
-f ZXSinG, Cosq, Co&Qi- f : SinG: X2Sin-0, Cosqv Sin(|),+Yi:Sin-0, ,+
+ ZlSin0, Sinq-, Cos©,-ifi/Sin9, Sin,;
XXSine, Со5ф,- Cos e,-f Yi;Sin0, Cos(j),+
+ ZSCOS-0,, Cos0, 0;
R, R+AR,,
где R const.
AR,6,--XSinG, Cosф,-YSin©, Sinqv-Z Cos0,,
где AR,- - приращение радиуса измеряемой
поверхности экрана из ее центра;
X,Y,Z - координаты центра измеряемой
внутренней поверхности экрана
кинескопа;
б, - приращение радиуса измеряемой поверхности экрана из центра поворота измерительного преобразователя;
Ф/ - угол поворота радиуса-вектора номинальной сферы относительно оси Z в плоскости ХОУ; О, - угол наклона измерительного преобразователя к оси Z,
определяют смещение центра поворота измерительного преобразователя относительно центра измеряемой поверхности и переме- мещают экран до тех пор, пока смещение не станет меньще величины До l/R сГ, где До - величина допустимого смещения центра поворота измерительного преобразователя; rf - допуск на радиус измеряемой поверхности.
Фи,г.
| Автоматизированная оценка показателей точности станка (в рамках ОАСУ Минстанкопром) на базе анализа norpeai- ностей формы обрабатываемого изделия | |||
| Этап I и II | |||
| Отчет ЭНИМС | |||
| М.: ЭНИМС, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
