Изобретение относится к измерительной технике и может быть использовано для навигационных измерений.
Целью изобретения является повышение оперативности.
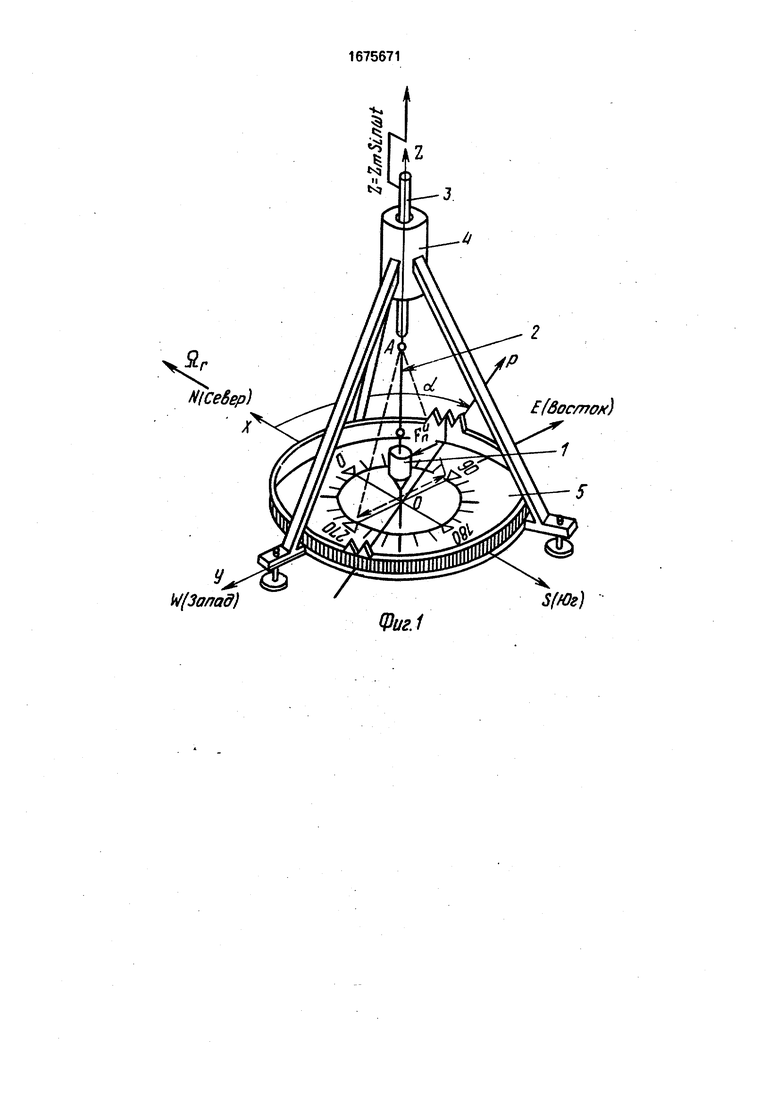
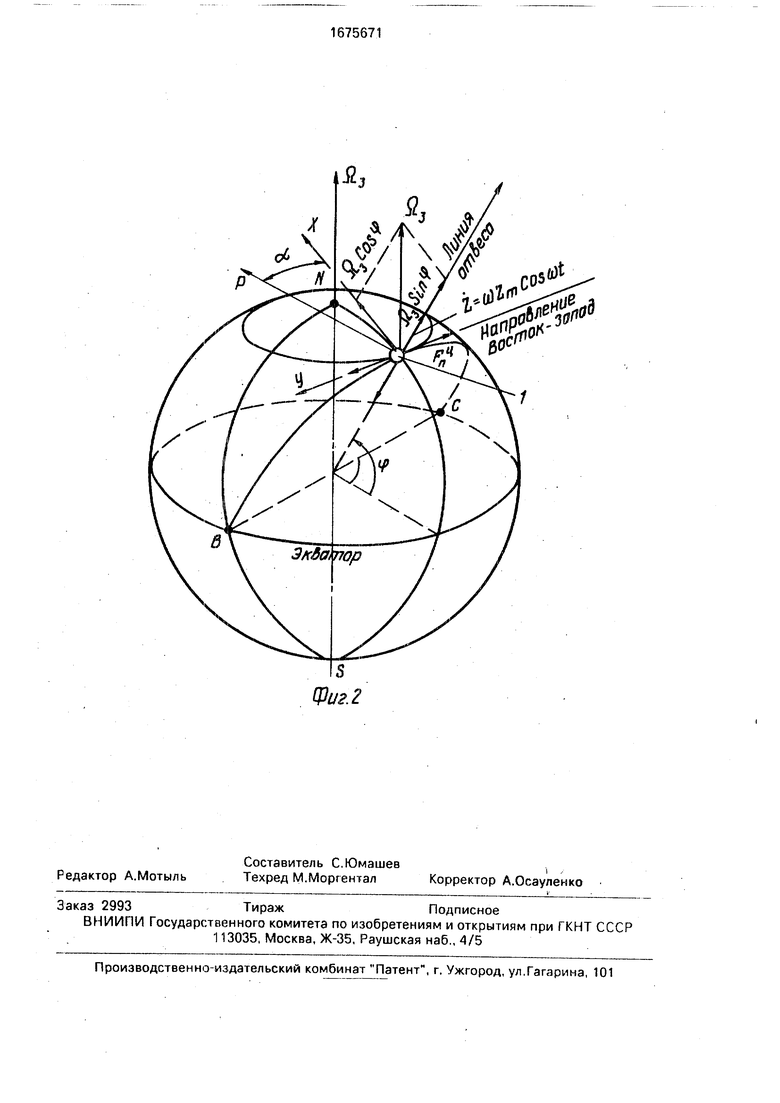
На фиг. 1 изображено устройство для осуществления способа; на фиг. 2 - схема, поясняющая физический принцип измерения истинного азимута в пределах поля тяготения Земли или любого космического тела.
Способ осуществляется следующим образом.
Тело 1 произвольной массы размещает в пространстве с возможностью его возвратно-поступательного движения вдоль отвесной линии отвеса и вдоль любого направления в плоскости, перпендикулярной этой линии, сообщают этому телу вдоль отвесной линии периодическое колебание и по напрвлению вектора колебаний центра масс тела, перпендикулярного к отвесной линии, определяют истинное географическое направление Восток-Запад и соответственно истинный азимут.
При этом телк 1 массой М сообщают возвратно-поступательное перемещение
вдоль отвесной линии (оси OZ) с угловой частотой по закону
Z Zm-sinun,(1)
где Z - отклонение центра масс тела вдоль оси OZ в момент времени t;
Zm - амплитуда колебаний центра масс тела;
ы - угловая частота колебаний центра масс тела (величина ее выбирается из конструктивных соображений), придают телу возможность возвратнопосту- пательного перемещения в любом направлении в плоскости, перпендикулярной оси OZ, в дальнейшем это тело в таком подвесе будет называться чувствительным элементов (Ч.Э.).
При таких условиях тело участвует в двух движениях: переносном с угловой скоростью горизонатальной составляющей суточного вращения Земли Q равной
Q- ОзсозЈ,(2)
где из - угловая скорость суточного вращения Земли:
(р- широта места,
относительном вдоль линии отвеса (оси OZ) с реверсируемой скоростью Vz, равной
Vz Z Ыг ZmCOS Wr t,(3)
(Л
с
(
VI ел
о
VI
где о) Zm амплитуда скорости перемещения центра масс тела (Н.Э.) вдоль оси OZ.
За счет этого центр масс тела (Н.Э.) одновременно с колебаниями вдоль отвесной чинии совершает колебания в истинном направлении Восток-Запад под действием си лы инерции РГЬ равной
FnM -MW,(4)
вызванной периодическмм поворотным ус корением Wn, равным
Wn 2(Q-j Vz) 2Озсоз tp ; (р 2т slnVz Q (5)
где Vz Qr - угол между векторами Vz и Q , и действующим вдоль направления, перпендикулярного к плоскости, образованной ректорами скоростей V/ и Q . r.e. вдоль географического направления Восток-Запад. Вектор Wn лежит в плоскости ВОС(фиг. 2), перпендикулярной к плоскости по меридиану SON.
При размещении такого чувствительного элемента в поле тяготения Земли Е любой условной точке его центр масс вращается с угловой скоростью о) в плоскости, перпендикулярной вектору горизонтальной составляющей суточного вращения Земли и проходящей через линию отвеса этой точки. Вращение центра масс тела (Н.Э.) всегда происходит против часовой трелки, если смотреть с конца вектора Q- . При этом центр масс тела описывает овальную траекторию с большей полуосью Zm, равной амплитуде его колебаний вдоль вертикальной оси OZ и малой полуосью, равной амплитуде его колебаний под действием сильГРгЛ вызванной поворотным ускорением Wn.
В каких бы направлениях относительно географического меридиана (под углом а- азимут) в плоскости горизонта не перемещался объект, снабженный таким прибором, под действием возникающего поля ускорений чувствительный элемент прибора всегда смещается периодически относительно корпуса объекта в истинном направлении Восток-Запад. Причем при движении тела (Н.Э.) вверх, оно отклоняется на Запад, а при движении вниз - на Восток. Устройство для осуществления способа содержит симметричное тело 1 массой 20 г, подвешивается на тонкой нити 2 длиной 0,25 м к стержню 3, который имеет возможность возвратно-поступательного перемещения вдоль отвесной линии в опоре 4 по скользящей посадке без лифтов в плоскости горизонта. Затем эта плавающая точка подвеса А получившегося маятника выставляется таким образом, чтобы ось перемещения
стержня строго совпадала с отвесной линией и осью симметрии подвешенного тела 1. Стержню 3 а опоре 4 сообщают возвратно-поступательное перемещение вдоль отвесной линии около нулевого положения на величину ± 10 см с частотой а), близкой к частоте собственных колебаний маятника (частота й, близкая к частоте собственных колебаний маятника принимается для повы0 шения чувствительности установки).
Основание установки 5 с лимбом, находящееся в горизонтальной плоскости, ориентируется так, чтобы линия ОУ совлдала с направлением Восток-Запад (90-270.
Предлагаемый способ позволяет определить географическое направление Восток-Запад, т.е. измерять истинный азимут как неподвижных, так и не движущихся объектах, находящихся в поле тяготения Земли
о или любых космических тел, имеющих собственную скорость вращения, с высокой избирательностью, стабильностью и с малым временем готовности средств реализации в сравнении с гидроскопическими из-за воз5 можности использования чувствительного инерционного тела значительно меньшей массы.
Кроме того, способ позволяет без применения внешних источников информации
0 (т.е. автономно) измерять истинный азимут для совершения управляемого перемещения объектов на любые расстояния в течение сколько угодно длительного времени, позволяет создасть приборы для измерения истинного азимута, обладающие высокой
5 надежностью, помехозащищенностью и скрытностью в работе. Приборы, созданные на основе предлагаемого способа, способны надежно сохранять (повторять) истинный азимут после прекращения работы с
0 последующим ее возобновлением.
На основе предлагаемого способа возможно создавать приборы с малыми весога- баритными характеристиками.
Формула изобретения
5Способ ориентирования, включающий
физическое воздействие на твердое тело с точкой свободного подвеса и отождестве- ние направления стран света по положению твердого тела, отличающийся тем, что,
0 с целью повышения оперативности, физическое воздействие на твердое тело производят путем возвратно-поступательного перемещения точки подвеса вдоль отвесной линии, а отождествление направления Восток-Запад осуществляют по направлению
5
качания твердого тела.
У
ЩЗалад)
Фиг.1
SffOg)
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ | 2001 |
|
RU2183820C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ (ЕГО ВАРИАНТЫ) | 2000 |
|
RU2174217C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ | 2003 |
|
RU2234062C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2018 |
|
RU2681422C1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ВОСТОК | 2012 |
|
RU2608377C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС ДЛЯ КВАЗИСТАТИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2408843C1 |
Изобретение относится к измерительной технике и может быть использовано при навигационных измерениях для определения направления стран света. Цель изобретения - повышение оперативности. Точку подвеса твердого тела перемещают возвратно поступательно вдоль отвесной линии и по направлению вектора колебаний центра масс тела, перпендикулярного к линии отвеса, и определяют истинное географическое направление Восток-Запад. 2 ил.
| Деймлих Ф | |||
| Геодезическое инструмен- товедение | |||
| - М.: Недра, 1970, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1921 |
|
SU275A1 |
