Ссылки на родственные заявки
Настоящая заявка притязает на приоритет заявки US 13/273667, зарегистрированной 14 октября 2011 г. и целиком включенной в настоящую заявку посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к устройству и способам для определения направления стороны света и, в частности, определения направления стороны света в скважине.
Уровень техники
Бурение нефтяных скважин (именуемых также буровыми скважинами или просто скважинами) выполняют с помощью бурильной колонны, которая содержит трубчатый элемент (именуемый также бурильной трубой) с буровой компоновкой (именуемой также компоновкой низа бурильной колонны, или КНБК), включающей буровое долото, прикрепленное к ее нижнему концу. Вращаясь, буровое долото разрушает породу пласта, благодаря чему осуществляется бурение скважины с последующим ее заканчиванием. КНБК и трубчатый элемент включают приборы и датчики для получения информации о различных параметрах, связанных с буровыми операциями (параметрах режима бурения), поведением КНБК (параметрах КНБК) и пластом, окружающим пробуриваемую скважину (параметрах пласта). Для выполнения измерений приборы и датчики используют энергию. Значительную часть скважин, пробуриваемых в настоящее время, составляют наклонно-направленные и горизонтальные скважины. КНБК, используемая для бурения таких скважин, обычно включает одно или более устройств, выполненных с возможностью ориентирования КНБК для пробуривания искривленных/горизонтальных участков ствола скважины. КНБК включает одно или более устройств, обеспечивающих получение исходных координат, используемых управляющим устройством или процессором для ориентирования КНБК.
Раскрытие изобретения
В настоящем изобретении предлагаются устройство и способ для определения стороны света (направления на восток), которые можно использовать при проведении скважинной операции, включая ориентирование КНБК в выбранном направлении, обеспечивая, среди прочего, повышение точности определения направления на восток в скважинных устовиях.
В одном аспекте настоящего изобретения предлагается способ определения направления стороны света, который в одном варианте осуществления включает предоставление по меньшей мере двум телам возможности движения под действием силы тяжести через среду, определение местоположения столкновения этих тел с прибором и определение направления стороны света по местоположению на основе сравнения местоположений столкновения тел.
В другом аспекте настоящего изобретения предлагается устройство для определения направления стороны света, которое в одном варианте осуществления включает источник, выполненный с возможностью обеспечения падения тел под действием силы тяжести, прибор (конструктивный компонент), выполненный с возможностью приема падающих тел и подачи сигналов, соответствующих местоположению участков этого прибора, на которые падают тела, и процессор, выполненный с возможностью определения направления стороны света путем использования местоположения участков этого прибора, на которые падают тела. В альтернативном варианте осуществления устройства используется тело, погруженное в текучую среду, имеющую большую массовую плотность, чем это тело, так что при освобождении тело будет подниматься под действием силы тяжести и слегка смещаться к западу от линии отвеса.
Для лучшего понимания настоящего изобретения ниже приведено подробное описание, в котором широко представлены примеры конкретных отличительных признаков устройства и способа, предлагаемых в изобретении. Имеются, конечно, и другие отличительные признаки устройства и способа, предлагаемых в изобретении, составляющие предмет изобретения, определяемый формулой изобретения.
Краткое описание чертежей
Для наилучшего понимания настоящего изобретения ниже приведено его подробное описание со ссылками на приложенные чертежи, на которых схожим элементам в большинстве случаев присвоены схожие численные ссылочные обозначения и на которых показано:
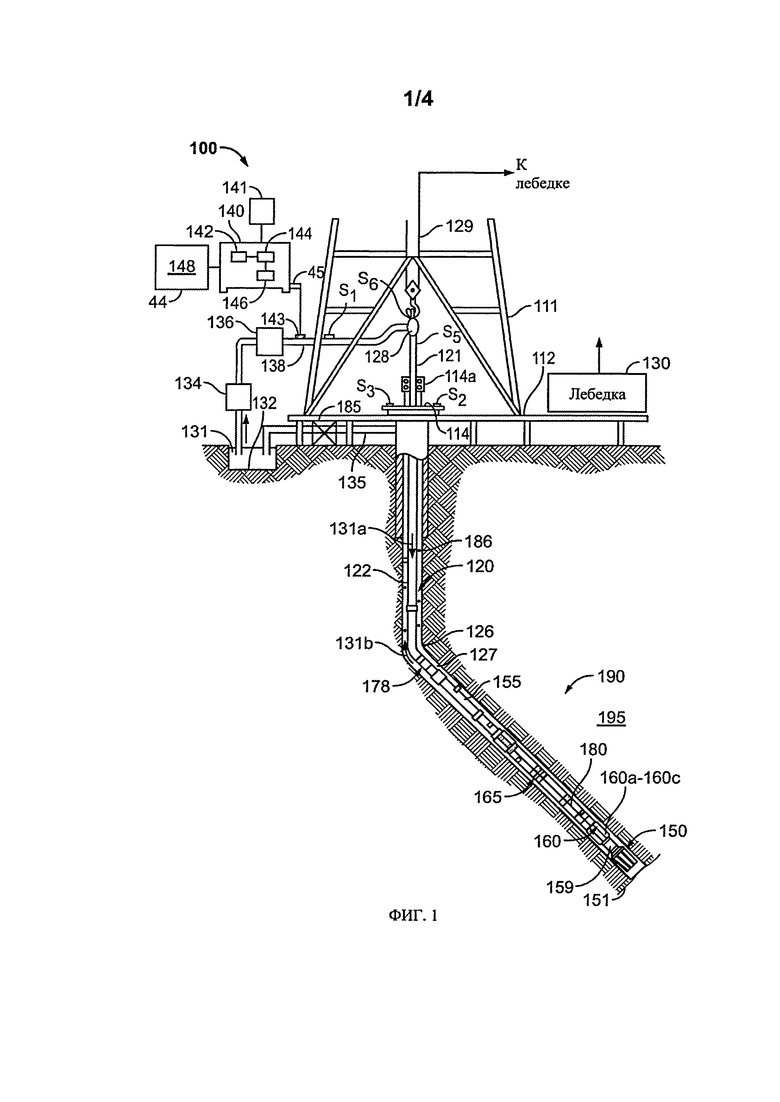
фиг. 1 - вид в вертикальном разрезе буровой системы, включающей устройство для определения направления бурильной колонны во время бурения скважины,
фиг. 2 - одномерное схематическое изображение устройства для определения направления, выполненного согласно одному из вариантов осуществления настоящего изобретения,
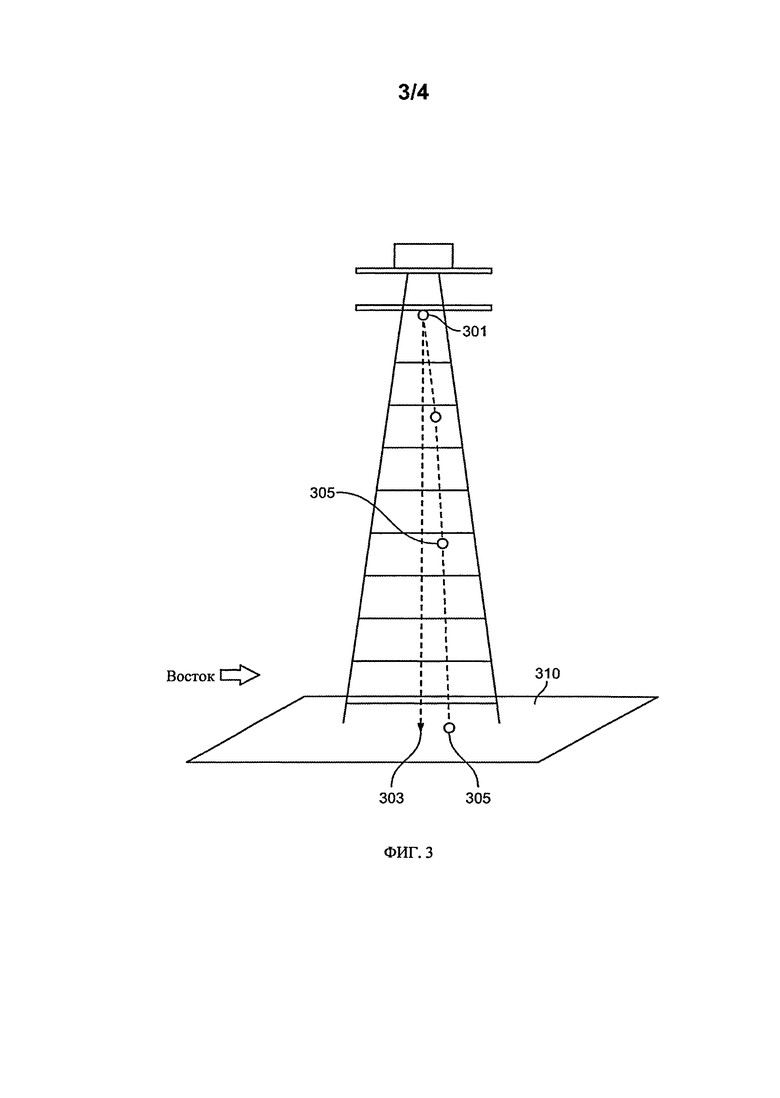
фиг. 3 - изображение, иллюстрирующее принцип определения направления стороны света с помощью способов, соответствующих настоящему изобретению и представленных в качестве примера,
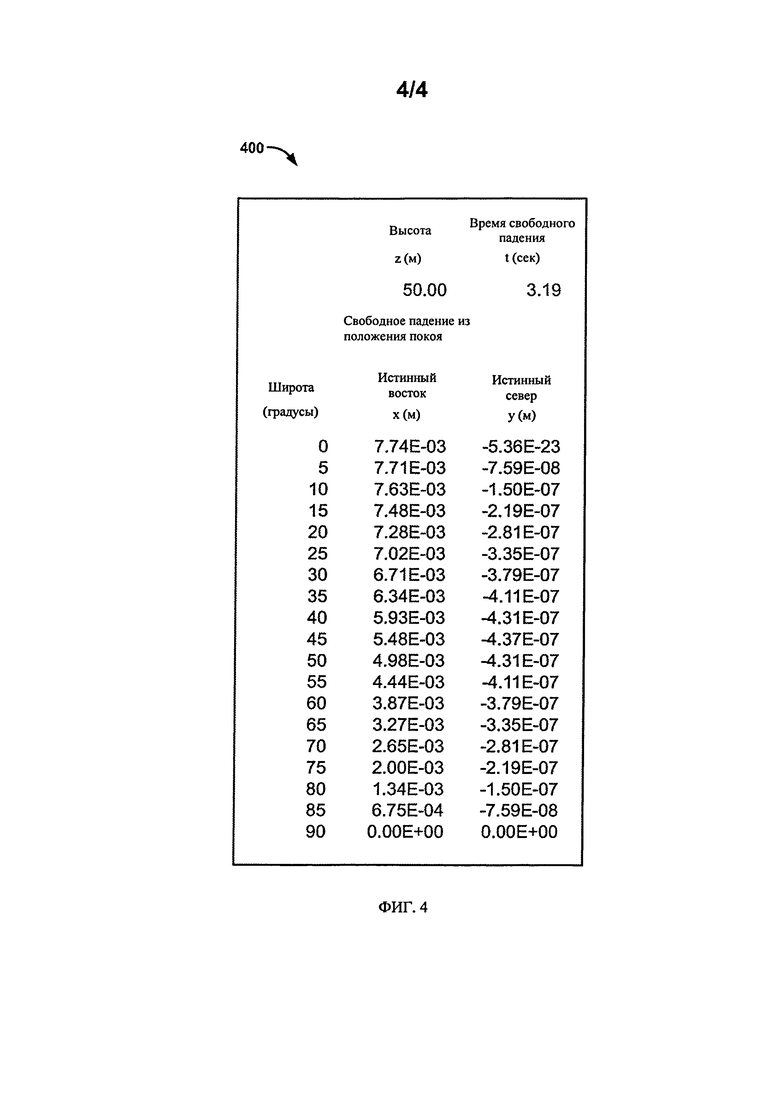
На фиг. 4 приведена таблица, показывающая отклонение тела, падающего на разных широтах.
Подробное описание вариантов осуществления изобретения
На фиг. 1 представлено в качестве примера схематическое изображение буровой системы 100, включающей бурильную колонну 120, к нижнему концу которой прикреплена буровая компоновка. Бурильная колонна 120 включает буровую компоновку, или компоновку низа бурильной колонны (КНБК), 190, спущенную в скважину 126. Буровая система 100 включает стандартную вышку 111, смонтированную на платформе, или буровой площадке, 112 и служащую опорой для роторного стола 114, вращаемого с требуемой скоростью первичным двигателем, таким как электрический двигатель (не показан). Колонна труб (например, составленная из секций бурильных труб) 122 с прикрепленной к ее нижнему концу буровой компоновкой 190 простирается с поверхности до забоя 151 скважины 126. Буровое долото, прикрепленное к буровой компоновке 190, вращается и разрушает породу пласта, благодаря чему осуществляется бурение скважины 126. Бурильная колонна 120 связана с лебедкой 130 через ведущую бурильную трубу 121, вертлюг 128 и талевый канат 129 с помощью шкива. Лебедка 130 используется для регулирования нагрузки на долото. Вращение бурильной колонны 120 может осуществляться посредством верхнего привода 114а, а не первичного двигателя и роторного стола 114.
Через бурильную колонну 120 циркулирует соответствующая промывочная жидкость 131, именуемая также буровым раствором и подаваемая буровым насосом 134 из ее источника 132, такого как амбар. Промывочная жидкость 131 проходит из бурового насоса 134 в бурильную колонну 120 через поглотитель гидравлических ударов 136 и трубопровод 138. Выход промывочной жидкости 131а из бурильной колонны происходит на забое 151 скважины через отверстия в буровом долоте 150. Рециркулирующая промывочная жидкость 131b проходит вверх в направлении устья скважины через кольцевое пространство 127 между бурильной колонной 120 и стволом скважины 126 и возвращается в амбар 132 через возвратный трубопровод 135 и сепаратор 185, удаляющий обломки выбуренной породы 186 из этой рециркулирующей промывочной жидкости 131b. Датчик S1 в трубопроводе 138 предоставляет информацию о расходе промывочной жидкости. Наземный датчик S2 крутящего момента и датчик S3, связанный с бурильной колонной 120, предоставляют информацию о крутящем моменте и скорости вращения бурильной колонны 120. Скорость проходки бурильной колонны 120 можно определить по датчику S5, тогда как датчик S6 регистрирует нагрузку на крюк, создаваемую бурильной колонной 120.
В некоторых буровых операциях вращение бурового долота 150 происходит в результате вращения бурильных труб 122. Тем не менее, в других буровых операциях вращение бурового долота 150 может осуществляться посредством забойного, или скважинного, двигателя 155, размещенного в буровой компоновке 190 и выполняющего это вращение в одиночку или дополнительно к вращению бурильной колонны.
Наземный блок управления 140 получает сигналы от скважинных датчиков и приборов через датчик 143, размещенный в трубопроводе 138, а также сигналы от датчиков S1-S6 и других датчиков, используемых в системе 100, и обрабатывает эти сигналы в соответствии с командами, определяемыми заложенной в него программой. Необходимые параметры бурения и прочие данные отображаются на дисплее/мониторе 141 наземного блока 140 управления и используются оператором при управлении буровыми операциями. Наземный блок 140 управления может представлять собой систему на основе компьютера, включающую процессор 142 (например, микропроцессор), запоминающее устройство 144, например твердотельный накопитель данных, накопитель данных на магнитной ленте или жесткий диск и одну или более компьютерных программ 146 в запоминающем устройстве 144, доступных для процессора 142, выполняющего содержащиеся в этих программах команды. Кроме того, наземный блок 140 управления может поддерживать связь по меньшей мере с одним блоком 148 дистанционного управления. Наземный блок 140 управления может обрабатывать данные, относящиеся к буровым операциям, данные, получаемые от наземных датчиков и приборов, данные, поступающие из скважины, и может осуществлять управление одной или более операциями в скважине и работой наземного оборудования.
Буровая компоновка 190 может также содержать датчики, предназначенные для оценки параметров пласта (именуемые также датчиками для измерений в процессе бурения или каротажа в процессе бурения) и служащие для определения удельного электрического сопротивления, плотности, пористости, проницаемости, акустических характеристик, параметров, получаемых методом ядерного магнитного резонанса, коррозионных свойств флюидов или пластовых пород, содержания соли или солевого раствора и других требуемых характеристик пласта 195, окружающего буровую компоновку 190. Эти датчики, в целом известные специалистам в данной области, для удобства обозначены в настоящем описании общим ссылочным номером 165. Буровая компоновка 190 может, кроме того, включать ряд других датчиков и прочих устройств 159, служащих для контроля и/или определения одной или более функций и характеристик этой буровой компоновки (таких как скорость, вибрация, изгибающий момент, ускорение, колебания, закручивание, прихват-проскальзывание и т.д.), а также параметров бурения, таких как нагрузка на долото, расход промывочной жидкости, давление, температура, скорость проходки, азимут, положение отклонителя, вращение бурового долота и т.д.
Как показано на фиг. 1, бурильная колонна 120 также включает энергопреобразующие устройства 160 и 178. В одном варианте осуществления энергопреобразующее устройство 178 размещается в КНБК 190 и обеспечивает электрической энергией, например в виде тока, датчики 165 и/или коммуникационные устройства 159. Энергопреобразующее устройство 178 размещается в трубах бурильной колонны 120, обеспечивая электрической энергией скважинные датчики и приборы. Буровая компоновка также включает устройство 160 управления направлением бурения, содержащее ориентирующие элементы (именуемые также элементами приложения силы) 160а, 160b, 160 с, которые могут быть выполнены с возможностью независимого приложения силы к стенкам ствола скважины 126 для ориентирования бурового долота в любом конкретном направлении. Кроме того, буровая компоновка содержит устройство 180 для определения направления на восток в скважине. Данная информация используется, в свою очередь, для определения ориентации буровой компоновки 190 или бурового долота 150. Буровая компоновка 190 также содержит ориентационный датчик 180 для определения направления стороны света с помощью способов, представленных в настоящем описании. Определенное направление стороны света можно использовать для определения направления движения буровой компоновки и, следовательно, ввести в качестве исходных данных в устройство управления направлением бурения. Благодаря этому можно управлять направлением движения буровой компоновки, пользуясь направлением стороны света, определенным с помощью способов, представленных в настоящем описании. В различных вариантах осуществления эта информация используется для ориентирования буровой компоновки 190 или только бурового долота 150 в выбранном направлении с помощью устройства 160 управления направлением бурения. Устройство 180 подробно описано ниже со ссылками на фиг. 2-4.
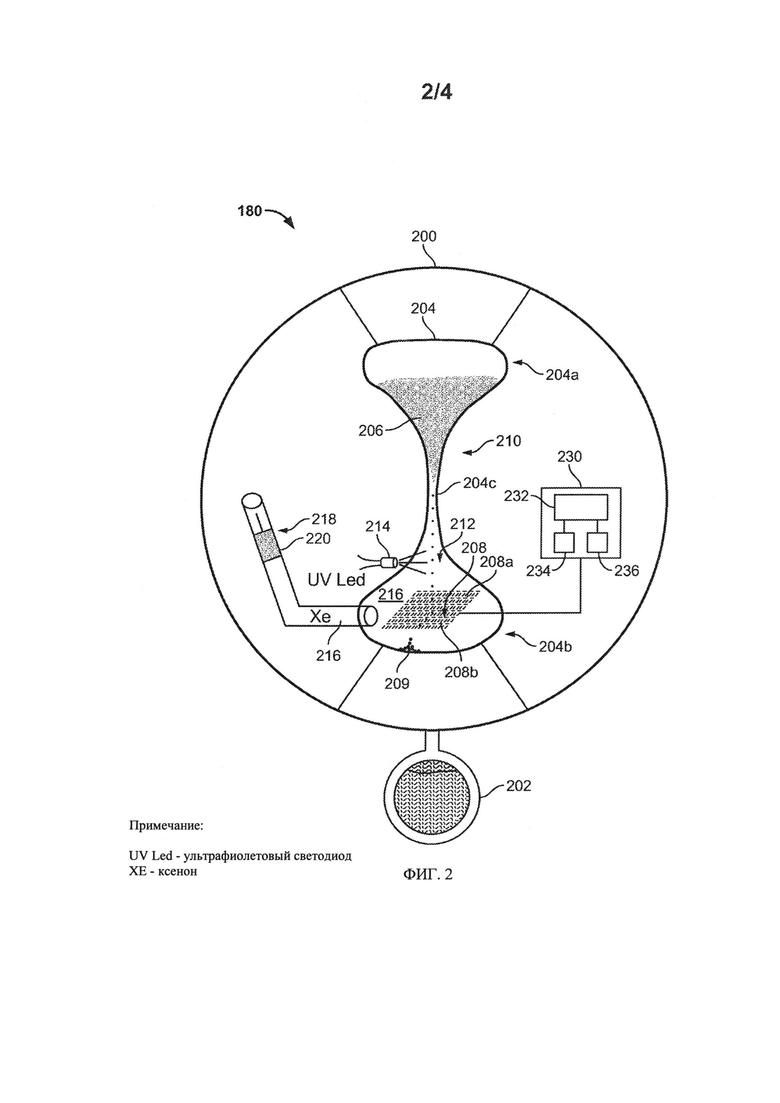
На фиг. 2 представлен в детальном изображении пример устройства 180 для определения направления стороны света, выполненного согласно одному из вариантов осуществления настоящего изобретения. Устройство 180 включает установленный в кардановом подвесе корпус 200, служащий опорой для конструктивного узла 210, определяющего направление стороны света. Установленный в кардановом подвесе корпус 200 связан с диском маятника 202, ориентирующим корпус 200 в направлении отвеса, как описано ниже применительно к фиг. 3. Диск маятника 202 в одном варианте осуществления является полым, заполнен вязким текучим веществом и содержит внутренние препятствия для сдерживания кратковременного движения, обусловленного вибрацией, благодаря чему после приведения в движение эта конструкция более быстро возвращается в состояние покоя. Конструктивный узел 210 включает песочные часы 204, прикрепленные к корпусу 200. Песочные часы 204 имеют длинную узкую горловину и содержат некоторое количество тел 206, находящихся в верхней части 204а песочных часов 204, и датчик 208, расположенный в нижней половине 204b песочных часов 204. Микрошарики (именуемые также полыми стеклянными шариками) имеют разные размеры, равные в большинстве случаев 35-80 микронов в диаметре, и низкую плотность, составляющую 0,22 г/куб. см для шариков с диаметром 35 микронов. Датчик 208 включает сенсорную матрицу 208а, состоящую из отдельных сенсорных элементов 208b, каждый из которых определяет одну ячейку матрицы. Тела 206 проходят через горловину 204с песочных часов 204 и падают на сенсорные элементы 208b матрицы 208а. Датчик 208 регистрирует места соударения тел 206 с отдельными сенсорными элементами (то есть места падения тел 206 на эти элементы) и посылает данные о зарегистрированном местоположении в блок 230 управления. Блок управления может находиться снаружи корпуса 200. В одном варианте осуществления блок управления может включать процессор 232, например микропроцессор, устройство 234 для накопления данных, например запоминающее устройство, и программные команды 236, выполняемые процессором 232. В одном варианте осуществления сенсорная матрица 208а может быть плоской и ориентированной по существу горизонтально, то есть по существу перпендикулярно линии отвеса. Матрица 208а может быть расположена с небольшим наклоном, позволяющим упавшим телам 206 переместиться в выбранное местоположение 209. Небольшое отклонение сенсорной матрицы от строго горизонтальной ориентации позволяет микрошарикам скатиться с этой матрицы после соударения. В одном из примеров осуществления сенсорная матрица 208а включает отдельные элементы - приборы с зарядовой связью (ПЗС), выполненные в форме ячеек, причем каждая ячейка имеет определенное положение относительно линии отвеса. В различных вариантах осуществления тела (такие как стеклянные микрошарики) 206 имеют, в основном, покрытие из флуоресцентного вещества 212, которое светится под действием ультрафиолетового (УФ) излучения. Источник 214 УФ-излучения предусмотрен для облучения тел с флуоресцентным покрытием, в предпочтительном варианте непосредственно перед их соударением с ПЗС-матрицей, благодаря чему тела 206 при этом соударении светятся, что позволяет датчику 208 зарегистрировать световой сигнал в месте (ячейке) соударения для каждого упавшего тела. Для определения направления на восток ячейки, на которые падают тела, сравниваются с ячейкой ПЗС-матрицы, соответствующей предварительно определенной линии отвеса. Малые расстояния (порядка 4 микронов) между центрами ПЗС-ячеек обеспечивают возможность обнаружения малых отклонений, составляющих 50-100 микронов, в восточном направлении, что позволяет измерить отклонения в восточном направлении на очень коротком (например, длиной 1 дюйм) пути падения, особенно если тело падает в текучей среде, создающей выталкивающую силу и замедляющей это падение.
В другом варианте осуществления по меньшей мере нижняя половина 204b песочных часов содержит среду 216, имеющую заданную плотность. Плотность среды 216 обычно выбирают таким образом, чтобы она была меньше плотности тел 206. В различных вариантах осуществления среда 216 представляет собой газообразный ксенон. С песочными часами 204 соединен задатчик (генератор) давления 218, регулирующий внутри них давление и плотность газообразного ксенона 216. Задатчик давления 218 включает поршень 220, совершающий внутри него поступательное движение для регулирования плотности газообразного ксенона 216. Давление ксенона, составляющее при комнатной температуре (25°C) приблизительно 470 фунтов/кв.дюйм, соответствует плотности 0,22 г/куб. см микрошариков с диаметром 35 микронов. В процессе работы тела падают на матрицу 208а и места их падения регистрируются блоком 230 управления. Как более подробно описано ниже, тела 206 будут падать восточнее точки пересечения линии отвеса с матрицей 208а. Блок 230 управления использует данные о местах падения тел 206 для определения по этой точке пересечения некоторой линии, направление которой и будет направлением на восток. Следует отметить, что для определения направления на восток требуется знать место падения лишь одного тела. Тем не менее, может оказаться полезным падение более чем одного тела для повышения точности определения направления на восток. В другом варианте осуществления давление среды 216 может изменяться таким образом, что время падения двух или более тел будет разным. Чем ближе значение плотности газообразного ксенона к значению плотности микрошарика (первое значение не должно превышать второе), тем медленнее будет движение/падение микрошарика и тем дальше в восточном направлении он упадет. Следовательно, зная давление ксенона и ячейки, на которые упали тела, можно провести линию, указывающую направление на восток, без привязки к ячейке, соответствующей линии отвеса. Кроме того, вязкое сопротивление, оказываемое газом микрошарикам, замедляет их падение и увеличивает отклонение в восточном направлении. Таким образом, в зависимости от времени падения тел они будут, очевидно, "совершать посадку" в точках, находящихся на разных расстояниях к востоку от линии отвеса. Более медленно движущиеся тела будут падать дальше к востоку от линии отвеса, чем более быстрые. Благодаря этому блок управления может определить линию между точками падения двух или более тел, указывающую направление на восток.
В одном варианте осуществления блок 230 управления может быть выполнен с возможностью приема сигналов от сенсорной матрицы 208а и обработки этих сигналов согласно программным командам для определения на их основе направления на восток. Кроме того, блок 230 управления может быть соединен с устройством управления направлением бурения буровой компоновки, показанной на фиг. 1, для ориентирования буровой компоновки 120 с использованием направления стороны света, определенного в соответствии с настоящим описанием. Блоки 230 и/или 140 (фиг. 1) управления могут быть выполнены с возможностью управления устройством 160 управления направлением бурения в буровой компоновке 190 (фиг. 1).
На фиг.3 представлено изображение, иллюстрирующее принцип, лежащий в основе определения направления стороны света с помощью способов, соответствующих настоящему изобретению и приведенных в качестве примера. Первое местоположение 301 определяется над вторым местоположением 303. Второе местоположение можно определить как точку пересечения линии отвеса, проведенной из первого местоположения, с горизонтальной плоскостью 310. Тело 308 падает из первого местоположения 301 в направлении второго местоположения 303. Отклонение в восточном направлении можно объяснить, применив закон сохранения момента количества движения в инерциальной системе отсчета (системе отсчета, не ускоряющейся при вращении относительно неподвижных звезд). Эту проблему можно сформулировать иначе на основе эффекта Кориолиса. Эффект Кориолиса возникает при выборе в качестве используемой системы отсчета вращающейся системы, такой как Земля, вместо инерциальной системы отсчета. Силы Кориолиса являются "фиктивными" силами в том смысле, что они были открыты при попытке применения ньютоновских законов движения (предназначавшихся для использования только в инерциальной системе отсчета) к случаю неинерциальной вращающейся системы отсчета. Вне зависимости от того, как формулируется данная проблема, в процессе падения тело 308 отклоняется главным образом в восточном направлении, находясь при соударении с горизонтальной плоскостью 310 в третьем местоположении 305, отличном от второго местоположения 303. Отклонение падающего тела преимущественно в восточном направлении означает, что третье местоположение 305 находится по существу в направлении истинного востока от второго местоположения 303. Поэтому найденные второе и третье местоположения можно использовать для определения направления на восток и, следовательно, ориентирования устройства в любом требуемом направлении.
Отклонение в восточном направлении тела, падающего из первого местоположения, дается известным уравнением

Здесь θ - колатитуда (дополнение широты), Ω - скорость вращения неинерциальной системы отсчета (то есть вращения Земли), a t - время падения. В этом случае положительные значения x соответствуют востоку, а отрицательные - западу. Следовательно, величина отклонения зависит от продолжительности падения и, как правило, мала по сравнению с расстояниями падения. Например, для тела, падающего с 50-метровой башни, максимальное отклонение в восточном направлении (на экваторе) составляет около 8 миллиметров.
Как следует из уравнения (1), интервал отклонения в восточном направлении можно увеличить путем увеличения времени падения тела. Время падения можно увеличить, увеличив высоту падения либо уменьшив ускорение и скорость падения. Одним из способов увеличения времени падения является, например, создание таких условий, при которых падение тела будет происходить в среде, где на тело действует выталкивающая сила. Эффективная величина ускорения тела в невязкой среде с выталкивающей силой зависит, как следует из приведенного ниже уравнения (2), от плотности тела и среды. В вязкой среде тело будет падать даже медленнее и может достичь установившейся скорости, после чего ускорение становится равным нулю

Здесь g - постоянная силы тяжести (9,8 м/с2), ρ0 - плотность тела и ρм - плотность среды. В одном примере осуществления тело представляет собой полый стеклянный микрошарик диаметром 35 микронов и плотностью 0,22 г/куб. см. Микрошарики падают в среде, представляющей собой плотный, находящийся под давлением газ (ксенон при 420-470 фунтов/кв. дюйм), имеющий плотность 0,218 г/куб. см. Для плотности текучей среды, равной 0,218 г/куб. см, эффективная величина ускорения микрошариков составляет приблизительно 0,048 м/с2, а установившаяся скорость микрошарика равна 2,75×10-5 м/с. На фиг. 4 приведена таблица, показывающая отклонение тела, падающего на разных широтах.
В альтернативном варианте осуществления плотность газообразного ксенона можно изменять с помощью задатчика давления 218 и поршня 220, показанных на фиг. 2. Ряд микрошариков падает из первого местоположения, а плотность газообразного ксенона изменяется таким образом, что этот ряд микрошариков 206 соударяется с датчиком 208 на ряде участков. Местоположения этих участков падения располагаются вдоль направления восток-запад, тем самым определяя ориентацию данного конструктивного узла.
Как можно видеть из таблицы 400, показанной на фиг. 4, имеется также составляющая, характеризующая отклонение в северном направлении и определяемая приведенным ниже уравнением (3), но величина этого отклонения, как правило, несравнима с величиной отклонения в восточном направлении. В данном случае положительные значения у соответствуют северу, а отрицательные - югу

Альтернативное устройство для определения направления стороны света включает машину Атвуда, содержащую первое тело, имеющее первую массу, и второе тело, имеющее вторую массу, причем эти тела соединены тросом, перекинутым через блок. Как следует из приведенного ниже уравнения (4), которое аналогично уравнению (2), на величину ускорения первого тела влияет наличие массы у второго тела

Пока масса первого тела превышает массу второго тела, первое тело будет ускоряться вниз. Однако массу второго тела можно подобрать таким образом, чтобы она была близка к массе первого тела, благодаря чему для первого тела будет достигнута меньшая величина ускорения вниз и более продолжительное время падения. Трос, прикрепленный к движущейся вниз массе, будет отклоняться в восточном направлении под малым углом относительно линии отвеса в соответствии с отклонением в восточном направлении первого тела, и этот угол также можно использовать для указания восточного направления.
Устройство в различных вариантах осуществления, выполненное согласно настоящему изобретению, может быть использовано в инструментах, спускаемых в скважину на тросе, с целью проведения инклинометрических измерений в скважине после бурения и подъема бурильной колонны. Физической основой этого служит то обстоятельство, что тело, находившееся в состоянии покоя в верхней точке башни и сброшенное оттуда, слегка отклоняется при падении в восточном направлении от воображаемой линии отвеса. Тело, находящееся в верхней точке башни, больше удалено от оси вращения Земли, так что оно смещается в восточном направлении немного быстрее, чем тело у основания башни, несмотря на то, что оба этих тела вращаются с одной и той же угловой скоростью.
Тем не менее, вследствие сохранения момента количества движения по мере падения тела скорость его смещения в восточном направлении и его угловая скорость продолжают возрастать, так что произведение скорости на пройденное расстояние остается постоянным. Данная ситуация аналогична случаю группы конькобежцев, выстроившихся в одну линию с вытянутыми руками и движущихся по кругу вокруг некоторой центральной точки. Если эти конькобежцы сократят линию, согнув руки в локтях, то линия будет вращаться быстрее. Аналогичным образом, сброшенное тело начинает двигаться вокруг Земли быстрее, чем тело у основания башни, так что чем дольше длится падение тела, тем больше будет его смещение в восточном направлении от неподвижной линии отвеса, когда оно приземлится.
Хотя описанные выше варианты осуществления настоящего изобретения относятся к телам, падающим в контролируемых окружающих условиях, данное устройство может быть выполнено с возможностью приведения тел в движение вверх, где их столкновение или посадка будет происходить к западу от линии отвеса. Примером может служить устройство, в котором тело погружено в текучую среду, имеющую большую массовую плотность, чем это тело, так что при освобождении тело будет подниматься под действием силы тяжести и слегка смещаться к западу от линии отвеса. Линия, проведенная от линии отвеса до точки посадки тела, определяет направление на запад.
Замедление падения тела с помощью противовеса (машина Атвуда) или погружения тела в текучую среду, создающую выталкивающую силу (где уравнения, определяющие ускорение вниз, аналогичны соответствующим уравнениям в случае машины Атвуда), увеличивает отклонение в восточном направлении и, следовательно, облегчает измерение этого отклонения. Точный расчет показывает также наличие незначительного отклонения в южном направлении для тел, падающих в северном полушарии, и в северном направлении для тел, падающих в южном полушарии. Тем не менее, как показано на фиг. 4, где приведены только положительные углы северной широты, эти отклонения обычно в 10000 и более раз меньше отклонения в восточном направлении, так что ими можно пренебречь. Для определения направления стороны света в предлагаемом изобретении используется вращение Земли, а не ее магнитное поле. Поэтому компас для определения направления на восток, выполненный согласно настоящему изобретению, представляет собой немагнитный компас, который можно использовать внутри обсаженных участков нефтяных скважин, непроницаемых для магнитного поля Земли из-за обсадных колонн, изготовленных из сплавов на основе железа.
Хотя приведенное выше описание посвящено конкретным вариантам осуществления настоящего изобретения, специалистам в данной области будет ясно, что в этих вариантах осуществления возможны различные модификации. Подразумевается, что приведенное выше описание охватывает все модификации, реализуемые в пределах объема и сущности настоящего изобретения и указанные в приложенной формуле изобретения.
Изобретение относится к средствам для определения направления стороны света и может быть использовано при бурении нефтяных скважин. Предложен способ определения направления стороны света, содержащий этапы, на которых: предоставляют по меньшей мере двум телам возможность движения под действием силы тяжести через среду; определяют местоположение столкновения по меньшей мере двух тел с прибором; и определяют направление стороны света на основе сравнения местоположений столкновения по меньшей мере двух тел. Также предложено устройство для осуществления указанного способа, содержащее источник, выполненный с возможностью обеспечения падения тел под действием силы тяжести через среду, прибор, выполненный с возможностью приема падающих тел и подачи сигналов, соответствующих местоположениям падения тел на прибор, и процессор, выполненный с возможностью определения направления на восток по сигналам упомянутого прибора. Предложенное изобретение обеспечивает точное определение направления относительно сторон света без использования магнитных средств. 5 н. и 18 з.п. ф-лы, 4 ил.
1. Способ определения направления стороны света, в котором:
предоставляют по меньшей мере двум телам возможность движения под действием силы тяжести через среду;
определяют местоположение столкновения по меньшей мере двух тел с прибором; и
определяют направление стороны света на основе сравнения местоположений столкновения по меньшей мере двух тел.
2. Способ по п. 1, в котором предоставление возможности движения по меньшей мере двум телам включает их падение в текучей среде, имеющей меньшую плотность, чем плотность этих тел.
3. Способ по п. 1, в котором предоставление возможности движения по меньшей мере двум телам включает их движение с преодолением заданного давления.
4. Способ по п. 1, в котором определяется также другое местоположение, соответствующее одному из линии отвеса и местоположению другого тела, падение которого отличается от падения упомянутых выше по меньшей мере двух тел.
5. Способ по п. 1, в котором упомянутый прибор выполнен с возможностью подачи сигнала, соответствующего местоположению падения по меньшей мере двух тел на прибор, сравнительно с местоположением вдоль линии отвеса.
6. Способ по п. 5, в котором определение направления стороны света осуществляют посредством обработки процессором сигнала, поданного прибором.
7. Способ по п. 5, в котором упомянутый прибор содержит матрицу, включающую приборы с зарядовой связью и подающую сигналы, соответствующие местоположению участков этой матрицы, на которые упали по меньшей мере два тела.
8. Способ по п. 6, в котором:
наносят на по меньшей мере два тела покрытие из выбранного вещества, обеспечивающее свечение тел под действием ультрафиолетового излучения; и
воздействуют ультрафиолетовым излучением на по меньшей мере два тела, когда они находится в движении.
9. Способ по п. 1, в котором по меньшей мере два тела включают стеклянный микрошарик.
10. Способ выполнения операции в скважине, в котором:
спускают инструмент в скважину; и
определяют ориентацию инструмента в скважине относительно направления стороны света посредством:
обеспечения падения тел под действием силы тяжести через среду;
определения местоположений падения тел; и
определения направления стороны света по местоположениям падения тел.
11. Способ по п. 10, в котором выполняют в скважине выбранную операцию посредством инструмента с использованием определенного направления стороны света.
12. Способ по п. 11, в котором выбранная операция представляет собой управление направлением движения инструмента в скважине.
13. Устройство для использования в скважине, содержащее:
источник, выполненный с возможностью обеспечения падения тел под действием силы тяжести через среду;
прибор, выполненный с возможностью приема падающих тел и подачи сигналов, соответствующих местоположениям падения тел на прибор; и
процессор, выполненный с возможностью определения направления на восток по сигналам упомянутого прибора.
14. Устройство по п. 13, в котором обеспечивается падение тел вдоль линии отвеса.
15. Устройство по п. 13, в котором прибор включает матрицу с сенсорными элементами, выполненную с возможностью подачи сигналов, соответствующих сенсорным элементам, на которые падают тела.
16. Устройство по п. 15, в котором сенсорные элементы представляют собой приборы с зарядовой связью, каждый из которых выполнен в форме ячейки матрицы.
17. Устройство по п. 13, в котором тела представляют собой стеклянные микрошарики, покрытые флуоресцентным веществом.
18. Устройство по п. 13, содержащее источник ультрафиолетового излучения, выполненный с возможностью освещения тел.
19. Устройство по п. 13, содержащее генератор давления, выполненный с возможностью снижения скорости по меньшей мере одного из падающих тел.
20. Устройство по п. 13, в котором среда, окружающая падающие тела, имеет меньшую плотность, чем плотность этих тел.
21. Устройство по п. 14, содержащее механизм, выполненный с возможностью удержания оси устройства в вертикальном положении.
22. Устройство для определения направления стороны света, содержащее:
источник для размещения тел, выполненный с возможностью обеспечения падения тел из первого местоположения в направлении второго местоположения через среду; и
прибор, выполненный с возможностью приема падающих из источника тел во втором местоположении и подачи сигналов, соответствующих местоположениям падения тел на прибор; и
процессор, выполненный с возможностью определения направления на восток по сигналам упомянутого прибора.
23. Способ определения направления стороны света, в котором:
обеспечивают падение первого тела под действием силы тяжести из первого местоположения в направлении второго местоположения через среду и с первым временем падения;
обеспечивают падение второго тела под действием силы тяжести из первого местоположения в направлении второго местоположения через среду и со вторым временем падения, отличающимся от первого времени падения; и
определяют направление стороны света по местоположениям падений первого и второго тел.
| Способ исследования движения тел | 1990 |
|
SU1818629A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ УГЛА ИСКРИВЛЕНИЯ БУРОВОЙ СКВАЖИНЫ И ЕГО АЗИМУТА | 1931 |
|
SU32463A1 |
| Система геомагнитного азимутального кругового обзора для ориентации устройств направленного бурения | 1989 |
|
SU1668652A1 |
| ПРЕОБРАЗОВАТЕЛЬ АЗИМУТА СКВАЖИННОГО ИНКЛИНОМЕТРА | 1991 |
|
RU2018647C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2110046C1 |
| US 7325322 B2, 05.02.2008 | |||
| US 6176323 B1, 23.01.2001. | |||

