,- IV sin 2iis ft - Wv(f |-sin(mojt+|j + e); Us K-K,-Ursin 2 ft-WM , cos (mtot+Ј+),
(2)

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электропривод | 1989 |
|
SU1676053A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Вентильный электропривод | 1988 |
|
SU1654960A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| Цифро-аналоговая следящая система | 1985 |
|
SU1282328A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
Изобретение относится к электротехнике и может быть использовано в следящих системах. Целью изобретения является повышение КПД и линейности механических характеристик. Для достижения поставленной цели вентильный электропривод дополнительно содержит два датчика тока 16, 17, два блока изменения фазы 18, 19, вычислитель 20, функциональные преобразователи "Синус" 21 и "Косинус" 22, два апериодических звена 14, 15. Указанная цель достигается путем вычисления фаз сигнала на выходе датчика 2 положения ротора и токов якорной обмотки синхронной машины 1, сравнения этих фаз в вычислителе 20, преобразования полученного сигнала в функциональных преобразователях 21 и 22 и корректировки напряжения питания обмотки возбуждения и квадратурной обмотки датчика 2 положения ротора в функции измеренного фазового рассогласования. 2 ил.
где К1 - коэффициент передачи вращающегося трансформатора; m - число пар полюсов синхронной машины 1 и датчика 2; б - угол взаимного расположения статора датчика 2 и статора синхронной машины 1. Пройдя через первый 7 и. второй 10 фазочувствительные выпрямители, эти напряжения преобразуются в напряжения :
U7 K-KrK2-U3- Wktp, .sin (mut+0+|l-w);
U10 K-K,. Mpl. cos (rowt+e+fb-v),
(3)
,-Kj-Kj- K(pl sin (mutt+p+e-4/-v) ,- k(p,.cos (mut+fb+e-M -v),
К - коэффициент передачи между напряжением на входе усилителя 8(11) и током i,(i2) .на выходе усилителя 8(11); „ ц) - суммарный фазовый сдвиг между напряжением U7(Uf0) и током якоря i|(i2) синхронной машины 1.
где К - коэффициент передачи фа- зочувствительного выпрямителя 7(10);
V arctg mwT1 - сдвиг по фазе между выходным и входным напряжениями фазочувствитель- ного выпрямителя 7(10); Т - постоянная времени фазо- чувствительного выпрямителя 7(10).
Напряжения Uj и 1Ь, усиленные первым 8 и вторым 11 усилителями, вызывают токи в синусной 9 и косинусной 12 обмотках электродвигателя 1:
(4)
Если допустить, что первый 8 и второй 11 усилители являются безынерционными звеньями, то
V arctg mcoT2, (5) где Tj - .электромагнитная постоянная времени якорной обмотки синхронной машины 1.
Токи i, и 1г, протекая по синусной 9 и косинусной 12 обмоткам синхронной машины 1,создают магнитодвижущую силу статора, которая, взаимодействуя е магнитодвижущей силой ротора/ приводит его во вращение с частотой, пропорциональной напряжению управления
(6)
А
К , К з К ,- К- U
V
где К - коэффициент, определяемый конструктивными параметрами синхронной машины 1. Анализ уравнения (6) показывает, что вентильный электропривод поддерживает частоту вращения пропорциональной амплитуде напряжения управления. Регулировочная характеристика электропривода при этом имеет вид прямой линии.
Вращающий момент электродвигателя равен
М I г Ф ,(7)
где I - вектор тока статора синхронной машины 1;
Ф - вектор магнитного потока ротора синхронной машины. На основании выражения (7), уравнений (4) и учитывая, что Ф « sinutt, найдем значение вращающего момента двигателя:
К,-Кг.К j- U,, V2 Ф0 sin (fi+в-ч-ч)
(8)
Анализ выражения (8) показывает, что двигатель будет развивать максимальный момент, если
/i+6-Ч1- V 90° (9)
Так как углы /i, ц и у являются функцией частоты вращения ротора электродвигателя, то при необходимо осуществить настройку двигателя таким образом, чтобы угол 9 90°. При скорости двигателя, отличной от нуля (to 0) , для выполнения условия (9) необходимо,чтобы Л М + у(Ю)
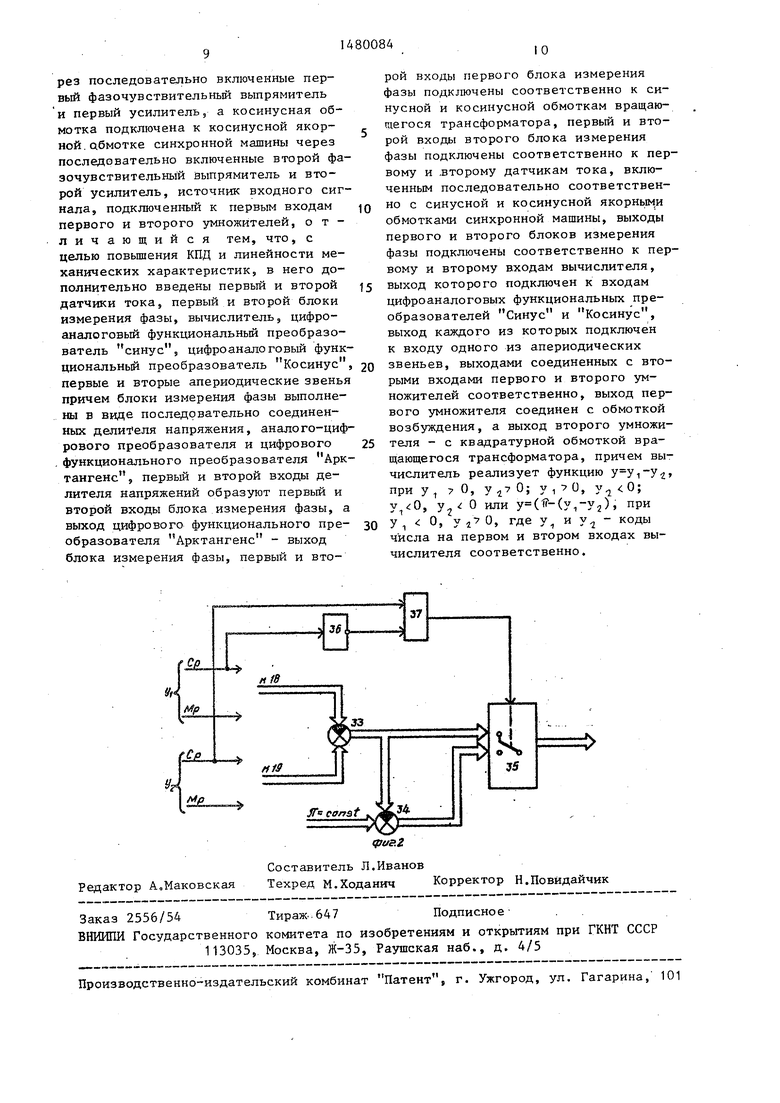
Для реализации этого условия в схему электропривода введены первый 18 и второй 19 блоки измерения фазы, вычислитель 20, цифроаналогевый функциональный преобразователь Си- нус и цифроаналоговый функциональный преобразователь Косинус.
На первый и второй входы первого блока 18 измерения фазы поступают напряжения, снимаемые соответственно с синусной 5 и косинусной 6 обмоток
вращающегося трансформатора. С помощью делителя 25 напряжении блока 18 определяется отношение этих напряжений с
УЈ Б Бл-yj sin 2Јft sin(mu)t+Ј+e2
Up , 2i ft-cos(mut+/3+e)
К« tg (mwt+/ +0),
(И)
где К4 - коэффициент передачи делителя 25.
Это напряжение с помощью аналого- цифрового преобразователя 26 преобразуется в цифровой код, который затем поступает на вход цифрового функционального преобразователя 27 Арктангенс, который реализует функцию Арктангенс. Код числа yf на выходе
цифрового функционального преобразователя 27 Арктангенс характеризует фазу напряжений 1J 6 и U у.
y arctg K4-K5 ttg(mut+/j+e) К« (mut+ib+e),(12)
где К у - коэффициент передачи аналого-цифрового преобразо- вателя 26;
.-Ks- коэффициент передачи блока измерения фазы. На первый и второй входы второго блока 19 измерения фазы поступают напряжения, снимаемые с выхода первого 16 и второго 17 датчиков тока;
Uft-K,T- , Uy sin (mu t+/i+e-if -v) ;
i, KAT.K.K,-K2.K3.U, «cos (mwt+/H-e-tf-4), (13)
где К дт- коэффициент передачи датчика тока. Второй блок 19 измерения фазы
осуществляет преобразование этих напряжений аналогично преобразованию напряжений первым блоком 18 измерения фазы и реализует на выходе код числа у , который пропорционален фазе вектора тока якоря синхронной машины 1 о
(mojt+|i+6-4 -v) (14)
Вычислитель 20 формирует на вы- ходе код числа у, связанный с кодами чисел у, и уа, поступающими на его входы с первого 18 и второго 19 блоков измерения фазы по следующему алгоритму:
у К4. (v+v)
Старший разряд (ср) кодов чисел у и у. несет информацию об их знаке, причем наличие 1 в старшем разряде числа соответствует его положи- тельному значению, а наличие О - отрицательному,
В случаях, если у , О, уу 0; у, 0, у, : 0 и уг 0, уг ОСфиг.2 с выхода логического элемента И 37 снимается сигнал, равньй О, и коммутатор 35 находится в таком состоянии, при котором его выход соединен с первым входом. Таким образом, с выхода коммутатора 35 снимается код числа, вычисленного первым сумматором 33„
Если же у1 0, а у2 у 0, то на выходе логического элемента И 37 возникает I и коммутатор 35 переклю- чается в такое состояние, при котором его выход соединяется с вторым входом.
Следовательно, с выхода коммутатора 35 будет сниматься код числа, вычисленного вторым сумматором 34.
Для формирования напряжения, поступающего на обмотку 3 возбуждения и квадратурную обмотку 4 вращающегося трансформатора, используются умно жители 14 и 15 напряжений, на первые входы которых подается напряжение управления, а на вторые входы - напряжения UZl и U г4, сформированные соответственно цифроаналоговым функцио- нальным преобразователем 21 Синус и цифроаналоговым функциональным преобразователем 22 Косинус совместно с апериодическими звеньями 23 и 24..
Напряжение формируется путем преобразования кода числа у с помощью цифрового функционального преобразователя 28 Синус в код sin у, который преобразуется в аналоговое напряжение с помощью первого цифро- аналогового преобразователя .28, а затем проходит через апериодическое звено 23 о
Аналогично формируется напряжение
и„.
MPI sin y K7Wkip :
sin (ч + 0-К4; (16)
y,-y2 при у, 0, У, 0, У, О,
-(Ут-У-,) при у ,
Mplcos (p,
xcos (ц + ч ) Kfe
Таким образом, напряжения, поступающие на обмотку 3 возбуждения и квадратурную обмотку А вращающегося трансформатора, описываются уравнениями :
и.
К -U у- sin 2ТГf t -W k( ...sin ( К,
U,5 K-lVsin 2tift.W ktp,-cos (u+ifO-Kt
(17
Сравнительный анализ уравнения
(17) с уравнением (1) показывает,что эти уравнения будут тождественны, если
Р К t (цч-v) (18)
Если блок 18 (19) измерения фазы выполнен таким образом, что К 1,
G
то сдвиг по фазе между напряжением на выходной обмотке вращающегося трансформатора 2 и током в соответствующей якорной обмотке синхронной машины 1 в установившемся режиме работы будет равным /5 м1 и в схеме электропривода выполнится условие (9), т„е„ угол между током статора и магнитным потоком ротора двигателя будет равен Г/2 во всем диапазоне изменения частоты вращения синхронной машины 1.
Апериодические звенья 23 и 24 обеспечивают устойчивую работу электропривода в переходных режимах.
Таким образом, вентильный электропривод позволяет увеличить КПД электродвигателя и повысить линейность его механических характеристик путем поддержания угла между полем ротора и полем статора синхронной машины равным 90°.
Формула изобретения
Вентильный электропривод, содержащий двухфазную синхронную машину, механически связанную с датчиком положения ротода, выполненным в виде вращающегося трансформатора с обмотками возбуждения квадратурной синусной и косинусной, причем синусная обмотка подключена к синусной якорной обмотке синхронной машины через последовательно включенные первый фазочувствительный выпрямитель и первый усилитель, а косинусная обмотка подключена к косинусной якор- ной о.бмотке синхронной машины через последовательно включенные второй фазочувствительный выпрямитель и второй усилитель, источник входного сигнала, подключенный к первым входам первого и второго умножителей, отличающийся тем, что, с целью повышения КПД и линейности механических характеристик, в него дополнительно введены первый и второй датчики тока, первый и второй блоки измерения фазы, вычислитель, цифро- аналоговый функциональный преобразователь синус, цифроаналоговьш функциональный преобразователь Косинус, первые и вторые апериодические звенья причем блоки измерения фазы выполнены в виде последовательно соединенных делителя напряжения, аналого-цифрового преобразователя и цифрового функционального преобразователя Арктангенс, первый и второй входы делителя напряжений образуют первый и второй входы блока измерения фазы, а выход цифрового функционального пре- образователя Арктангенс - выход блока измерения фазы, первый и втоfft
рой входы первого блока измерения фазы подключены соответственно к синусной и косинусной обмоткам вращающегося трансформатора, первый и второй входы второго блока измерения фазы подключены соответственно к первому и второму датчикам тока, включенным последовательно соответственно с синусной и косинусной якорными обмотками синхронной машины, выходы первого и второго блоков измерения фазы подключены соответственно к первому и второму входам вычислителя, выход которого подключен к входам цифроаналоговых функциональных преобразователей Синус и Косинус, выход каждого из которых подключен к входу одного из апериодических звеньев, выходами соединенных с вторыми входами первого и второго умножителей соответственно, выход первого умножителя соединен с обмоткой возбуждения, а выход второго умножителя - с квадратурной обмоткой вращающегося трансформатора, причем вычислитель реализует функцию у у1-уг, при у t 70, у 47 0; у, 0, У7 0; , у ; 0 или У(-(У1-У2), при УТ О, У27(, где У, и у - коды числа на первом и втором входах вычислителя соответственно.
| Способ управления высокоскоростным бесконтактным двигателем постоянного тока | 1974 |
|
SU660159A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
