F
Г1
(Л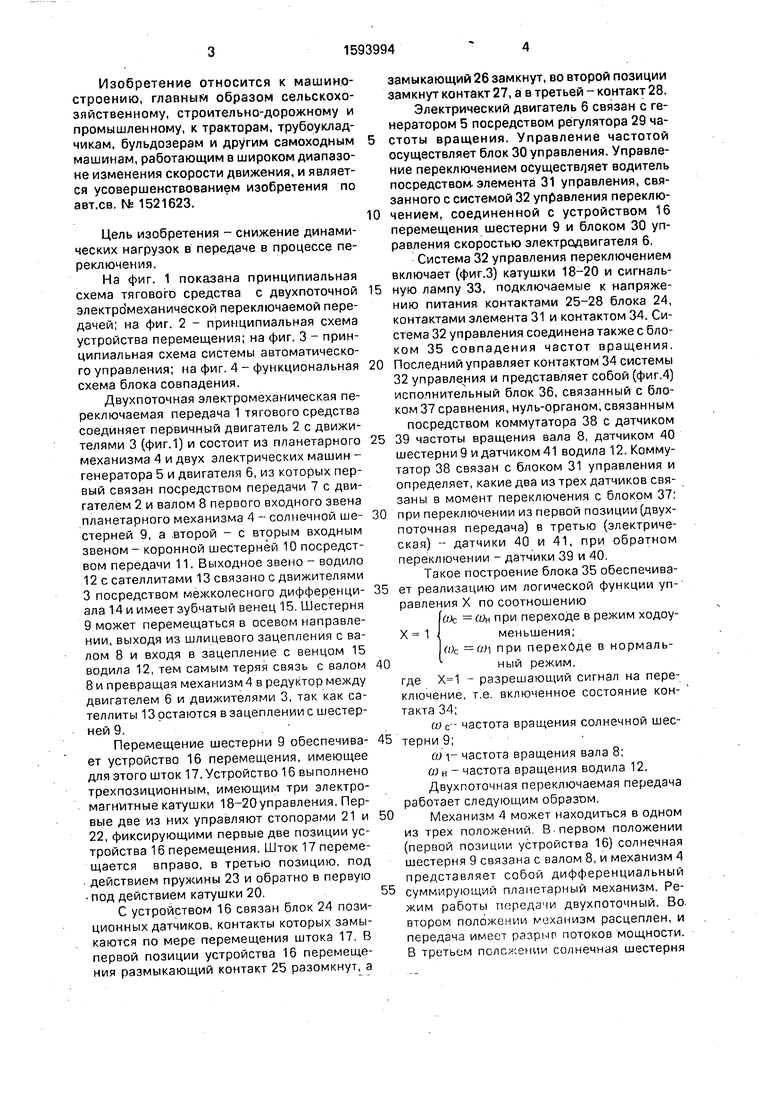
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпоточная электромеханическая передача тягового средства | 1988 |
|
SU1521623A1 |
| Двухпоточная электромеханическая передача | 1988 |
|
SU1521622A1 |
| Двухпоточная электромеханическая передача тягового средства | 1988 |
|
SU1684112A2 |
| Двухпоточная электромеханическая передача тягового средства | 1988 |
|
SU1794701A2 |
| Способ переключения двухпоточной передачи с двухпоточного режима на однопоточный и обратно | 1988 |
|
SU1521624A1 |
| Двухпоточная электромеханическая передача тягового средства | 1988 |
|
SU1837021A1 |
| Способ переключения двухпоточной передачи транспортного средства | 1988 |
|
SU1593993A1 |
| Способ управления трактором с двухпоточной электромеханической трансмиссией переменного тока в режиме электростанции | 1987 |
|
SU1473985A1 |
| Двухпоточная трансмиссия | 2019 |
|
RU2705371C1 |
| ДВУХПОТОЧНЫЙ ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА | 2012 |
|
RU2506175C1 |
Изобретение относится к машиностроению, главным образом сельскохозяйственному, строительно-дорожному и промышленному: к тракторам, трубоукладчикам, бульдозерам, самоходным машинам, работающим в широком диапазоне изменения скорости движения. Цель изобретения - снижение динамических нагрузок в передаче в процессе переключения. Блок 35 совпадения частот вращения элементов механизма 4 фиксирует совпадение частот вращения солнечной шестерни 9 с водилом 12 или шестерни 9 с валом 8 в зависимости от направления перемещения. 4 ил.
ел ю со ю ю |Ь.
fO
J
Изобретение относится к машиностроению, главным образом сельскохозяйственному, строительно-дорожному и промышленному, к тракторам, трубоукладчикам, бульдозерам и другим самоходным машинам, работающим в широком диапазоне изменения скорости движения, и является усовершенствованием изобретения по авт.св. № 1521623.
Цель изобретения - снижение динамических нагрузок в передаче в процессе переключения.
На фиг. 1 показана принципиальная схема тягового средства с двухпоточной электро механической переключаемой передачей; на фиг. 2 - принципиальная схема устройства перемещения; на фиг. 3 - принципиальная схема системы автоматического управления; на фиг. 4 - функциональная схема блока совпадения.
Двухпоточная электромеханическая переключаемая передача 1 тягового средства соединяет первичный двигатель 2 с движителями 3 (фиг.1) и состоит из планетарного механизма 4 и двух электрических машин - генератора 5 и двигателя 6, из которых первый связан посредством передачи 7 с двигателем 2 и валом 8 первого входного звена планетарного механизма 4 - солнечной шестерней 9, а .второй - с вторым входным звеном- коронной шестерней 10 посредством передачи 11. Выходное звено - водило 12 с сателлитами 13 связано с движителями 3 посредством межколесного дифференциала 14 и имеет зубчатый венец 15. Шестерня 9 может перемещаться в осевом направлении, выходя из шлицевого зацепления с валом 8 и входя в зацепление с венцом 15 водила 12, тем самым теряя связь с валом 8 и превращая механизм 4 в редуктор между двигателем 6 и движителями 3, так как сателлиты 13 остаются в зацеплении с шестерней 9.
Перемещение шестерни 9 обеспечивает устройство 16 перемещения, имеющее для этого шток 17. Устройство 1 б выполнено трехпозиционным, имеющим три электро- . магнитные катушки 18-20управления. Первые две из них управляют стопорами 21 и 22, фиксирующими первые две позиции устройства 16 перемещения. Шток 17 перемещается вправо, в третью позицию, под . действием пружины 23 и обратно в первую . под действием катушки 20.
С устройством 16 связан блок 24 позиционных датчиков, контакты которых замыкаются по мере перемещения штока 17. В первой позиции устройства 16 перемещения размыкающий контакт 25 разомкнут а
и
0
15
20
25
30
35
40
замыкающий 26 замкнут, во второй позиции замкнут контакт 27, а в третьей - контакт 28. Электрический двигатель 6 связан с генератором 5 посредством регулятора 29 частоты вращения. Управление частотой осуществляет блок 30 управления. Управление переключением осуществляет водитель посредством, элемента 31 управления, связанного с системой 32 управления переключением, соединенной с устройством 16 перемещения шестерни 9 и блоком 30 управления скоростью электродвигателя 6,
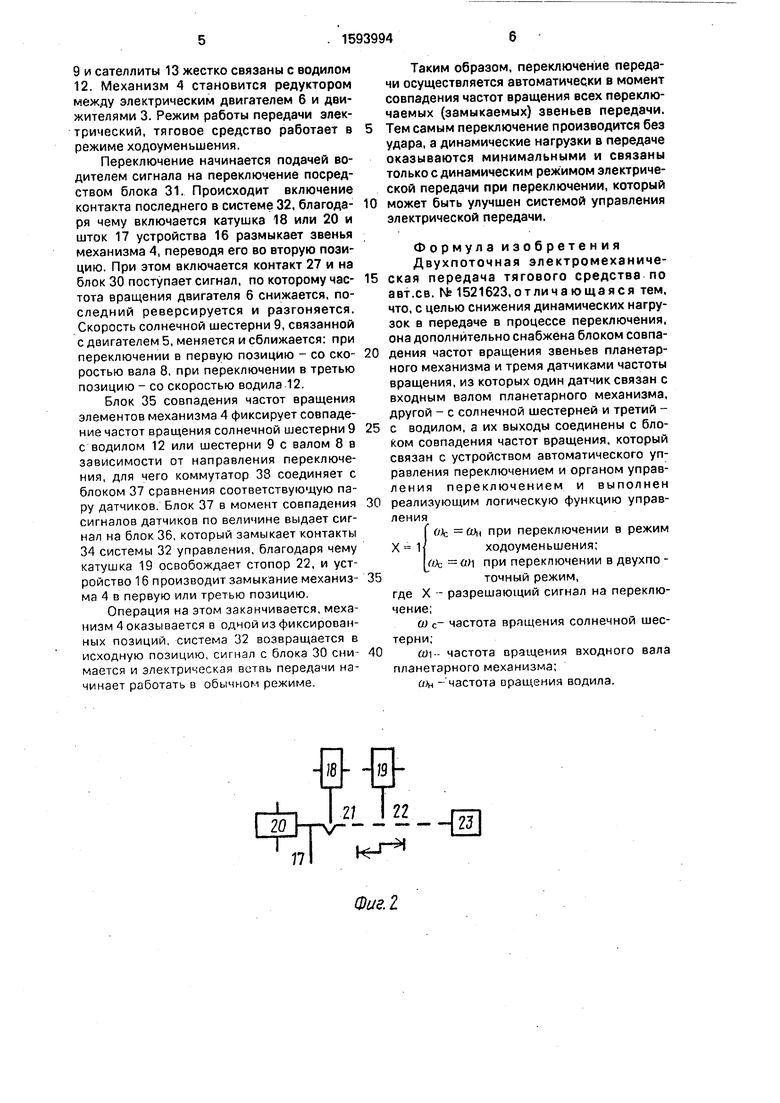
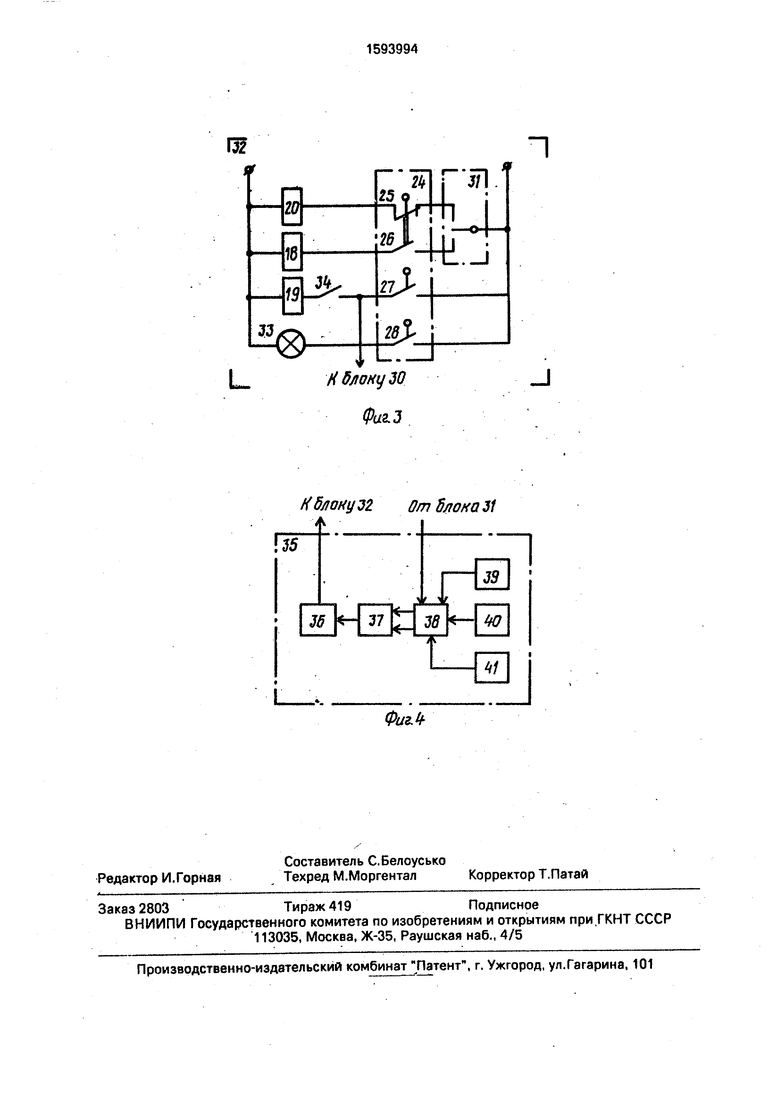
Система 32 управления переключением включает (фиг.З) катушки 18-20 и сигнальную лампу 33, подключаемые к напряжению питания контактами 25-28 блока 24, контактами элемента 31 и контактом 34. Система 32 управления соединена также с блоком 35 совпадения частот вращения. Последний управляет контактом 34 системы 32 управления и представляет собой (фиг.4) исполнительный блок 36, связанный с блоком 37 сравнения, нуль-органом, связанным посредством коммутатора 38 с датчиком 39 частоты вращения вала 8, датчиком 40 шестерни 9 и датчиком 41 водила 12. Коммутатор 38 связан с блоком 31 управления и определяет, какие два из трех датчиков свя- заны в момент переключения с блоком 37: при переключении из первой позиции (двух- поточная передача) в третью (электрическая) - датчики 40 и 41, при обратном переключении - датчики 39 и 40.
Такое построение блока 35 обеспечивает реализацию им логической функции уп- равления X по соотношению
(,) г а)н при переходе в режим ходоуменьшения;
(0 - при переходе в нормальный режим, - разрешающий сигнал на переХ 1
где
т.е. включенное состояние кон45
50
55
ключение, такта 34;
Шс частота вращения солнечной шестерни 9;
О) 1- частота вращения вала 8;
Шн - частота вращения водила 12.
Двухпоточная переключаемая передача работает следующим образом.
Механизм 4 может находиться в одном из трех положений. В-первом положении (первой позиции устройства 16) солнечная шестерня 9 связана с валом 8, и механизм 4 представляет собой дифференциальный суммирующий планетарный механизм. Режим работы передачи двухпоточный. Во. втором положении механизм расцеплен, и передача имеет разрыв потоков мощности. В третьем положении солнечная шестерня
9 и сателлиты 13 жестко связаны с водилом 12. Механизм 4 становится редуктором между электрическим двигателем 6 и движителями 3. Режим работы передачи электрический, тяговое средство работает в режиме ходоуменьшения.
Переключение начинается подачей водителем сигнала на переключение посредством блока 31. Происходит включение контакта последнего в системе 32, благодаря чему включается катушка 18 или 20 и шток 17 устройства 16 размыкает звенья механизма 4, переводя его во вторую позицию. При этом включается контакт 27 и на блок 30 поступает сигнал, по которому частота вращения двигателя 6 снижается, последний реверсируется и разгоняется. Скорость солнечной шестерни 9, связанной с двигателем 5, меняется и сближается: при переключении в первую позицию - со скоростью вала 8, при переключении в третью позицию - со скоростью водила 12.
Блок 35 совпадения частот вращения элементов механизма 4 фиксирует совпадение частот вращения солнечной шестерни 9 с водилом 12 или шестерни 9 с валом 8 в зависимости от направления переключения, для чего коммутатор 38 соединяет с блоком 37 сравнения соответствующую пару датчиков. Блок 37 в момент совпадения сигналов датчиков по величине выдает сигнал на блок 36, который замыкает контакты 34 системы 32 управления, благодаря чему катушка 19 освобождает стопор 22, и устройство 16 производит замыкание механизма 4 в первую или третью позицию.
Операция на этом заканчивается, механизм 4 оказывается в одной из фиксированных позиций, система 32 возвращается в исходную позицию, сигнал с блока 30 снимается и электрическая ветвь передачи начинает работать в обычном режиме.
Таким образом, переключение передачи осуществляется автоматически в момент совпадения частот вращения всех переключаемых (замыкаемых) звеньев передачи,
Тем самым переключение производится без удара, а динамические нагрузки в передаче оказываются минимальными и связаны только с динамическим режимом электрической передачи при переключении, который
может быть улучшен системой управления электрической передачи.
Формула изобретения Двухпоточная электромеханиче- екая передача тягового средства по а ВТ.св. N: 1521623, отличающаяся тем, что, с целью снижения динамических нагрузок в передаче в процессе переключения, она дополнительно снабжена блоком совпа- дения частот вращения звеньев планетарного механизма и тремя датчиками частоты вращения, из которых один датчик связан с входным валом планетарного механизма, другой - с солнечной шестерней и третий - с водилом, а их выходы соединены с блоком совпадения частот вращения, который связан с устройством автоматического управления переключением и органом управления переключением и выполнен реализующим логическую функцию управления
ioJc при переключении в режим ходоуменьшения; Ос (1П при переключении в двухпо - точный режим,
где X - разрешающий сигнал на переключение;
О) с- частота вращения солнечной шестерни;
йл- частота вращения входного вала планетарного механизма;
- частота вращения водила.
Фиг. г
LНд/1онуЗО
Фаг.З
У 57ffAy 32 От длона 31 N
5
J
KzLtSH
J
31
33
71
w
J
| Авторское,свидетельство СССР Г 1521623, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
