Изобретение относится к передачам мрщности тяговых и транспортных средств.
Целью изобретения является расширение функциональных возможностей путем обеспечения автоматического безударного переключения на ходу при переводе перё- д$чи из однопоточного механического в д ухпоточный режим работы.
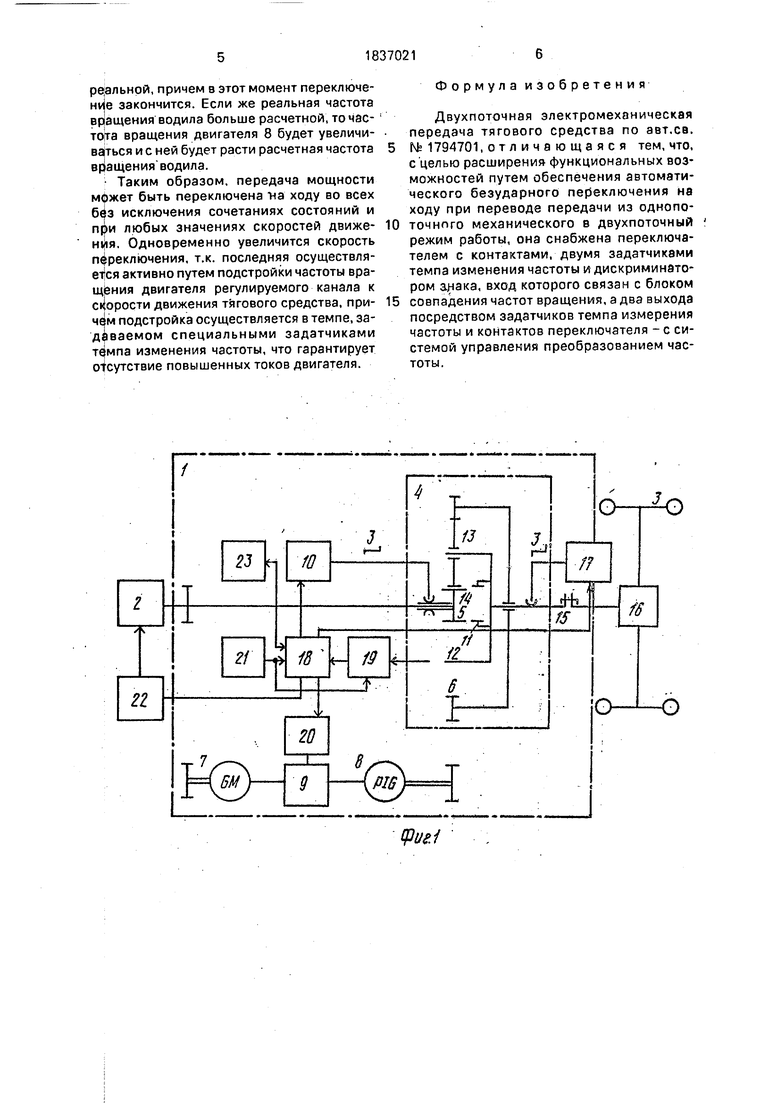
На фиг.1 представлена кинематическая схема передачи; на фиг.2 - блок-схема блока контроля совпадения частот вращения; на .З - диаграмма скоростей.
Передача 1 связывает первичный тепло- вс|й двигатель 2 с движителями 3 и состой, иЗ планетарного механизма 4, с двумя входными звеньями которого (солнечной шестерней 5 и коронной шестерней 6) соединены электрические машины: генератор 7 и двигатель 8, связанные между собой регулятором (преобразователем) 9 частоты вращения.
Механизм 4 имеет два подвижных в осевом направлении звена. Первое входное звено (солнечная шестерня 5) способно под действием блока 10 перемещаться в сторону имеющего внутренний зубчатый венец 11 водила 12 и входить с ним в зацепление, сохраняя при этом зацепление с сателлитами 13, но выходя из зацепления с валом 14. Выходное звено (водило 12) соединено шлисо со
Х|
О
ю
го
цевой млн зубчатой муфтой 15с межколесным дифференциалом 16 и способно благодаря этому перемещаться под действием блока 1.7 в сторону шестерни 5, выводя сателлиты 13 из соединения с коронной шестерней 6 и соединяясь с шестерней 5 своим зубчатым венцом 11.
С блоками 10 и 17 соединена система 18 управления переключением, которая связана посредством блока 19 контроля совпадения частот вращения с механизмом 4, с блоком 20 управления преобразователем 9, с командоаппаратом 21, с устройством 22 управления частотой вращения-двигателя 2 и с сигнальным устройством 23 на щитке водителя.
Блок 19 (фиг.2) состоит из исполнительного блока 24 - нуль-органа, связанного с элементом 25 сравнения, блока 26 переключения, включающего контакты 27 и 28 ко- мандоаппарата 21, блока суммирования 29 и четырех датчиков частоты вращения элементов механизма 4, датчика 30 шестерни 5, датчика 31 вала 14, датчика 32 водила 12 и датчика 33 электрического двигателя 8 или коронной шестерни 6..
При переключении контактов 27 вверх к блоку 25 подключаются блок 29 и датчик 32. В блоке 29, связанном ; с датчиками 31 и 33, вычисляется величина, пропорциональная частоте вращения водила 12, соответствующая замкнутому состоянию механизма 4. Одновременно к выходу блока 25 подключается вход дискриминатора знака 34; выходы которого посредством задатчиков 35 и 36 темпа изменения частоты вращения и замыкающих контактов переключателя 37 свяэа- ны с блоком 20 управления преобразователей 9 частоты. Размыкающие контакты переключателя 37 соединяют блок 20 с системой автоматического регулирования 38 частоты преобразователя 9.
Переключение передачи из состояния однопоточной механической в состояние двухпоточной осуществляется следующим образом.
Водитель со своего щитка посредством переключения в блоке 21 подает сигнал в систему 18, которая передает сигнал переключения на блок 17, который расцепляет, механизм 4, и сигнал на включение переключателя 37. По этому сигналу блок 20 реверсирует и разгоняет двигатель 8. Скорости элементов механизма 4 меняются и в момент совпадения частот вращения соответствующих элементов блок 19 выдает на систему 18 сигнал, разрешающий закончить переключение. Система 18 выдает на блоки 17 сигнал и тот замыкает механизм 4
0
5
0
5
0
5
0
5
0
5
о соответствующем положении. Переключение передачи 1 на этом заканчивается.
Совпадение частот вращения звеньев механизма 4 происходит в результате изменения частоты вращения двигателей 2 и 8 и движителей 3. Достигается проверка совпадения частот .сравнением частоты вращения водила 12 с вычисленным в блоке 29 значением его требуемой для безударного соединения элементов механизма 4 величины.
В процессе переключения скорости элементов механизма 4 изменяются. Скорость двигателя 8 меняется под действием сигнала блока 20, скорость двигателя 2 - в результате исчезновения нагрузки или сигнала блока 22, а скорость водила 12 - вследствие исчезновения тягового усилия. Совпадение скоростей может наступить при любом их сочетании, причем в этот момент механизм 4 будет замкнут и .переключение закончится. .
Однако возможен случай, когда совпадения частот не наступает. По диаграмме скоростей фиг.З видно, что если после установления частот вращения двигателя 2 и а)2 электрического двигателя 8 определяемая ими частота вращения одн водила 12 (точка на пересечении линии АБ с осью со) окажется выше реальной, совпадения этих частот вращения без дополнительного воздействия не произойдет вплоть до затормаживания транспортного средства. Это воздействие формируется благодаря подключению блока 34 к выходу блока 25, где сигнал пропорционален по величине и знаку разнице частот вращения водила, т.е. реальной и вычисленной в блоке 29. Сигнал этот поступает на вход блока 34, где в зависимости от знака проходит на первый или второй выход и поступает на один из задатчиков 35 или 36 темпа изменения частоты вращения двигателя 8. С выхода одного из задатчиков сигнал поступает на вход блока 20 управления преобразователем 9 частоты посредством контактов переключателя 37. Другие контакты переключателя 37 отключают от блока 20 управления (на время.переключения передачи)систему 38 автоматического регулирования, управляющую частотой двигателя 8 в режиме тяги или торможения. Причем в зависимости оттого, с какого из блоков (35 или 36) поступает сигнал, частота преобразователя 9 растет или снижается. Например, если реальная частота вращения водила меньше расчетной, то частота тока на входе двигателя 8 начинает снижаться, при этом уменьшается частота его и, следовательно, расчетная частота вращения водила до выравнивания с
реальной, причем в этот момент переключение закончится. Если же реальная частота вращения водила больше расчетной, точас- вращения двигателя 8 будет увеличи- вйться и с ней будет расти расчетная частота вращения водила.
Таким образом, передача мощности может быть переключена на ходу во всех без исключения сочетаниях состояний и при любых значениях скоростей движения. Одновременно увеличится скорость переключения, т.к. последняя осуществля- ет|ся активно путем подстройки частоты вращения двигателя регулируемого канала к скорости движения тягового средства, при- че м подстройка осуществляется в темпе, за- длваемом специальными задатчиками темпа изменения частоты, что гарантирует отсутствие повышенных токов двигателя.
Формула изобретения
Двухпоточная электромеханическая передача тягового средства по авт.св.
№ 1794701, от л и ч а ю ща я с я тем, что, с целью расширения функциональных возможностей путем обеспечения автоматического безударного переключения на ходу при переводе передачи из однопоточного механического в двухпоточный режим работы, она снабжена переключателем с контактами, двумя задатчиками темпа изменения частоты и дискриминатором анака, вход которого связан с блоком
совпадения частот вращения, а два выхода посредством задатчиков темпа измерения частоты и контактов переключателя - с системой управления преобразованием частоты.


фие.1
yt
