Изобретение относится к тяговым и транспортным средствам, преимущественно сельскохозяйственным и промышленным тракторам, и другим са моходным машинам с большим диапазоном скоростей.
Цель изобретения - повышение надежности за счет обеспечения защиты передачи от удара и электрического двигателя от превышения максимальной частоты вращения в процессе переключения передачи.
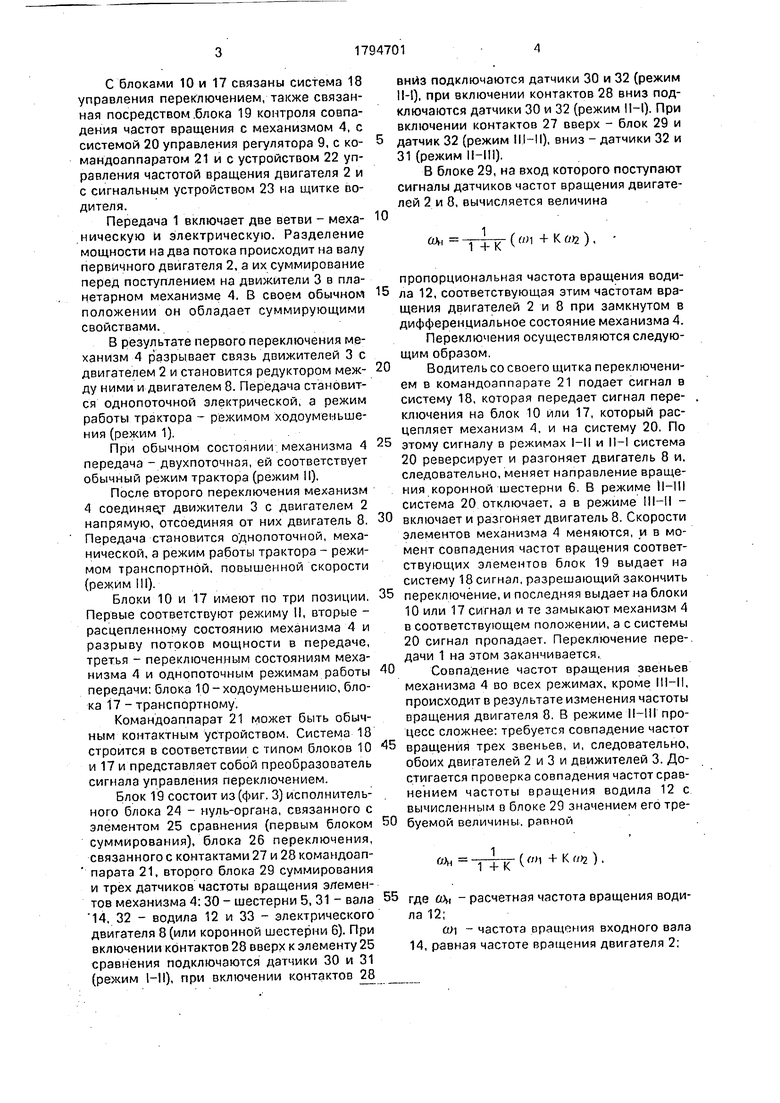
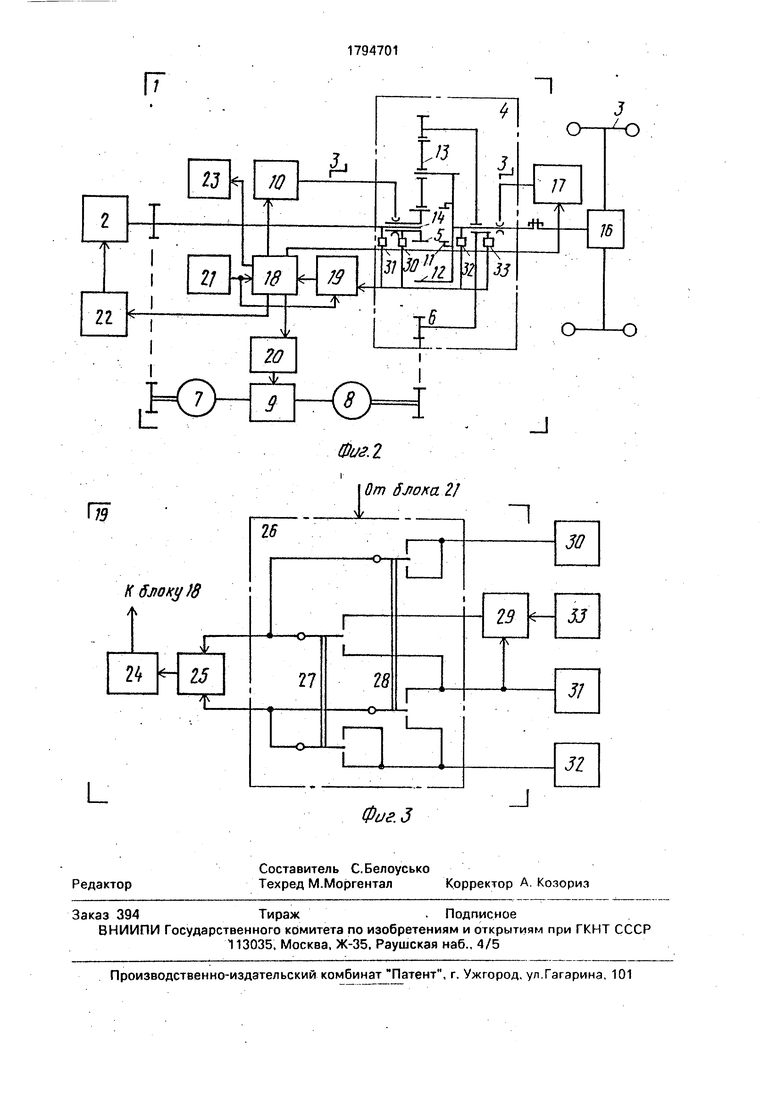
На фиг. 1 изображена принципиальная схема трактора с двухпоточной переключаемой электромеханической передачей; на фиг. 2 - принципиальная схема трактора с двухпоточной передачей, на которой показано размещение датчиков; на фиг. 3 - принципиальная схема блока совпадения частот вращения элементов переключаемого планетарного механизма.
Передача 1 связывает первичный тепловой двигатель 2 с движителями 3 и состоит из планетарного механизма 4, с двумя входными звеньями которого - солнечной шестерней 5 и коронной шестерней б - соединены электрические машины: генератор 7 и двигатель 8, связанные между собой регуля- - тором 9 частоты вращения;
Механизм 4 имеет два звена, подвижных в осевом направлении - это первое входное звено, солнечная шестерня 5, способная под действием блока 10 перемещаться в сторону имеющего внутренний зубчатый венец 11 водила 12 и войти с ним в зацепление, сохраняя зацепление с сателлитами 13, но выходя из зацепления с валом 14. Это также выходное звено - водило 12, соединенное шлицевой или зубчатой муфтой 15 с межколесным дифференциалом 16, способное благодаря этому перемещаться под действием блока 17 в сторону солнечной шестерни 5, выводя сателлиты 13 из соединения с коронной шестерней 6 и соединяясь с шестерней 5 своим зубчатым венцом 11.
(Л
С
xj о Јь XI
о
N3
С блоками 10 и 17 связаны система 18 правления переключением, также связанная посредством .блока 19 контроля совпаения частот вращения с механизмом 4, с системой 20 управления регулятора 9, с ко- мандоаппаратом 21 и с устройством 22 управления частотой вращения двигателя 2 и сигнальным устройством 23 на щитке воителя.
Передача 1 включает две ветви - механическую и электрическую. Разделение мощности на два потока происходит на валу первичного двигателя 2, а их суммирование перед поступлением на движители 3 в планетарном механизме 4. В своем обычном положении он обладает суммирующими свойствами.
В результате первого переключения механизм 4 разрывает связь движителей 3 с вигателем 2 и становится редуктором межу ними и двигателем 8. Передача становится однопоточной электрической, а режим работы трактора - режимом ходоумеиьше- ния (режим 1).
При обычном состоянии, механизма 4 передача - двухпоточнзя, ей соответствует обычный режим трактора (режим II),
После второго переключения механизм 4 соединяет движители 3 с двигателем 2 напрямую, отсоединяя от них двигатель 8. Передача становится однопоточной, механической, а режим работы трактора - режимом транспортной, повышенной скорости (режим III).
Блоки 10 и 17 имеют по три позиции. Первые соответствуют режиму II, вторые - расцепленному состоянию механизма 4 и разрыву потоков мощности в передаче, третья - переключенным состояниям механизма 4 и однопоточным режимам работы передачи: блока 10-ходоуменьшению, блока 17-транспортному.
Командоаппа.рат 21 может быть обычным контактным устройством. Система 18 строится в соответствии с типом блоков 10 и 17 и представляет собой преобразователь сигнала управления переключением.
Блок 19 состоит из (фиг. 3) исполнителе ного блока 24 - нуль-органа, связанного с элементом 25 сравнения (первым блоком суммирования), блока 26 переключения, связанного с контактами 27 и 28 командоап- парата 21, второго блока 29 суммирования и трех датчиков частоты вращения элементов механизма 4: 30 - шестерни 5, 31 - вала 14, 32 - водила 12 и 33 - электрического двигателя 8 (или коронной шестерни 6). При включении контактов 28 вверх к элементу 25 сравнения подключаются датчики 30 и 31 (режим HI), при включении контактов 28
вниз подключаются датчики 30 и 32 (режим II-I), при включении контактов 28 вниз подключаются датчики 30 и 32 (режим II-I). При включении контактов 27 вверх - блок 29 и
датчик 32 (режим II.I-II), вниз - датчики 32 и 31 (режим II-II1).
В блоке 29, на вход которого поступают сигналы датчиков частот вращения двигателей 2 и 8, вычисляется величина
СОн
1
1 +К
(wi + К nil ) ,
пропорциональная частота вращения водила 12, соответствующая этим частотам вращения двигателей 2 и 8 при замкнутом в дифференциальное состояние механизма 4. Переключения осуществляются следующим образом.
Водитель со своего щитка переключением в командоаппарате 21 подает сигнал в систему 18, которая передает сигнал переключения на блок 10 или 17, который расцепляет механизм 4. и на систему 20. По
этому сигналу в режимах I-II и M-I система 20 реверсирует и разгоняет двигатель 8 и, следовательно, меняет направление вращения коронной шестерни 6. В режиме II-III система 20 отключает, а в режиме III-II включает и разгоняет двигатель 8. Скорости элементов механизма 4 меняются, и в момент совпадения частот вращения соответствующих элементов блок 19 выдает на систему 18 сигнал, разрешающий закончить
переключение, и последняя выдает на блоки 10 или 17 сигнал и те замыкают механизм 4 в соответствующем положении, а с системы 20 сигнал пропадает. Переключение пере-, дачи 1 на этом заканчивается,
Совпадение частот вращения звеньев механизма 4 во всех режимах, кроме III-II, происходит в результате изменения частоты вращения двигателя 8. В режиме IHII процесс сложнее: требуется совпадение частот
вращения трех звеньев, и, следовательно, обоих двигателей 2 и 3 и движителей 3. Достигается проверка совпадения частот сравнением частоты вращения водила 12 с вычисленным в блоке 29 значением его требуемой величины, рапной
UJH ; + к ( + к «Ъ )
55 где WH - расчетная частота вращения водила 12;
- частота вращения входного вала 14, равная частоте вращения двигателя 2:
( - частота вращения шестерни б, пропорциональная частоте вращения двигателя 8;
К - кинематический параметр механизма 4.
В процессе переключения в режиме III- II все три скорости изменяются: двигателя 8 - под действием сигнала системы 20, двигателя 2 - в результате исчезновения нагрузки или сигнала устройства 22, а водила 12 - вследствие исчезновения тягового усилия. Совпадение их может наступить при любом их сочетании, и в этот момент механизм 4 будет замкнут и переключение закончится.
Процесс переключения и состояние механизма 4 может отражаться на щитке водителя устройством 23. для дополнительного визуального контроля.
Слежение за частотами вращения звеньев переключаемого механизма 4 в процессе переключения, достигаемое благодаря изобретению, гарантирует завершение переключения, замыкание механизма 4, в момент согласования скоростей, и тем самым отсутствие удара при переключении. Оно же надежно защищает электрический двигатель от рывков скорости и превышения ею максимального значения.

Изобретение относится к тяговым и транспортным средствам, преимущественно сельскохозяйственного и промышленного назначения, тракторам, бульдозерам и другим самоходным машинам ограниченного веса с большим и повышенным диапазоном изменения скорости движения. Цель изобретения - повышение надежности за счет обеспечения защиты передачи от удара максимальной частоты вращения в процессе переключения передачи в систему управ- ления добавляется датчик частоты вращения двигателя и второй блок суммирования, связанный с датчиками частоты вращения обоих двигателем. 3 ил.
Формула изобретения Двухпоточная электромеханическая передача тягового средства по авт. св. № 1747298, отличающаяся тем, что, с целью повышения надежности за счет обеспечения защиты передачи от удара и электрического двигателя от превышения максимальной частоты вращения в процессе переключения передачи, она содержит
датчик частоты вращения электрического двигателя, а блок совпадения частот вращения содержит второй блок суммирования, связанный входами с датчиками частоты вращения первичного и электрического двигателей, а выходом - с одним из входов первого блока суммирования посредством контактов переключателя управления переключением передачи.
Фиг.}
7
Фиг.2
I. .
От блока 2/
Г
г
п
Г
| Авторское свидетельство СССР М 1747298, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
