Изобретение относится к устройствам, обеспечивающим безопасность работы грузоподъемных механизмов, и может быть использовано, преимущественно, на мостовых кранах для предотвращения перегрузок механизма подъема.
Известен ограничитель грузоподъемности мостового крана, имеющий возможность смещения в вертикальной плоскости опоры грузового барабана, установленной в подшипнике, и уравновешивающее устройство, с которым связан рычаг, взаимодействующий с конечным выключателем, установленным в корпусе с крышкой и обойму с шариками и эксцентриковый стакан, смонтированный на вышеупомянутом подшипнике и опирающийся через шарики на обойму, при этом рычаг жестко установлен на эксцентриковом стакане. [А.с. №586093].
Указанному устройству присущи следующие недостатки.
Время срабатывания защиты определяется суммой собственных времен срабатывания механической части, концевого выключателя и электрической схемы и составляет 0,8…0,9 с. За это время груз может быть полностью снят с опоры, что в дальнейшем приведет к тяжелым авариям, а именно: нарушению сцепления соединительных муфт механизма, обрыву подвесных устройств, канатов и падению груза.
Наиболее близким к предлагаемому устройству по технической сущности и достигаемому результату решением является устройство, обеспечивающее безопасностную работу грузоподъемных механизмов, представляющее собой узел питания, аналого-цифровой преобразователь, тензодатчик, микропроцессор, блок управления асинхронным двигателем, включающий в себя блок управления реле и силовой контактор. [Руководство по эксплуатации ОГШ-1.2. Блок управления сигналом, цифро-аналоговый преобразователь. (ОГШ-1.2В с датчиком ДНК)]. При включении защитного устройства происходит ряд проверок. Отслеживается положение концевого выключателя переподъема гака и нагрузка при помощи тензометрического датчика; после того как распознается аварийный режим работы, происходит отключение питания привода механизма подъема. Недостатком устройства контроля является низкая точность замера усилий из-за значительного разбега результатов измерений тензодатчиками, который согласно паспортным данным тензодатчиков составляет ±10%.
Результатом низкой точности работы схемы измерения усилий могут быть тяжелые аварии, а именно: несрабатывание тормозных устройств привода подъема при перегрузке, нарушение сцепления соединительных - муфт механизма подъема, обрыв канатов и подвесных устройств и падение груза.
Задачей настоящего изобретения является повышение точности замера усилий и как следствие ограничение превышения массы поднимаемого груза свыше заявленных заводских характеристик, что приводит к предотвращению возникновения перечисленных аварий.
Решение поставленной задачи достигается тем, что устройство ограничения грузоподъемности мостового крана, содержащее блок управления асинхронным двигателем, включающий в себя блок управления реле и силовой контактор, отключающий асинхронный двигатель, отличается тем, что дополнительно содержит измерительный блок, выполненный на базе трансформаторов тока, включенных первичными обмотками в фазные проводники питающего кабеля обмотки статора электродвигателя, выход которого подключен к входу блока измерения массы, первый выход которого соединен с первым входом ключа, а второй выход поступает на первый вход первого блока сравнения, блок задания максимальной массы поднимаемого груза, выход которого подается на второй вход первого блока сравнения, выход которого поступает на второй вход ключа, выход которого поступает на первый вход второго блока сравнения, выход с которой подается на блок индикации и блок управления асинхронным двигателем, с выхода блока задания величины скачка подается на второй вход второго блока сравнения.
За счет использования в схеме измерительного 1 блока, блока 2 измерения массы, ключа 3, первого блока 4 сравнения, второго блока 5 сравнения, блока 6 управления асинхронным двигателем, блока 7 индикации, блока 8 задания величины скачка, блока 9 задания максимальной массы поднимаемого груза, в результате, осуществляется контроль электрических параметров асинхронного электродвигателя, повышается точность измерения усилия и, как следствие, ограничение превышения массы поднимаемого груза.
На фиг. 1 приведена принципиальная схема заявленного устройства ограничения грузоподъемности мостового крана; на фиг. 2 - временные циклограммы работы блоков, входящих в устройство.
Устройство ограничения грузоподъемности мостового крана (фиг. 1), содержит измерительный блок 1, сигнал с которого подается на блок 2 измерения массы, далее поступает на вход ключа 3 и первого блока 4 сравнения. С первого блока 4 сравнения сигнал подается на вход ключа 3, с выхода ключа 3 на вход второго блока 5 сравнения, с выхода которого подается на входы блока 6 управления асинхронным двигателем и блока 7 индикации. С выхода блока 8 задания величины скачка на вход второго блока 5 сравнения, с выхода блока 9 задания максимальной массы поднимаемого груза на вход первого блока 4 сравнения.
Измерительный блок 1 выполнен на базе трансформаторов тока в количестве трех штук, включенных первичными обмотками в фазные проводники питающего кабеля обмотки статора электродвигателя. Вторичные обмотки трансформаторов тока подключены к блоку 2 измерения массы, реализованному на схеме, адаптирующей сигнал для логических схем AЦП. Первый блок 4 сравнения включает в себя два операционных усилителя, служащих для установки нижнего и верхнего значений тока при помощи регулируемых сопротивлений. Далее следует ключ 3, выполненный на базе логического элемента «И». Второй блок 5 сравнения включает в себя два операционных усилителя, служащих для установки нижнего и верхнего значений тока при помощи регулируемых сопротивлений. Далее установлен блок 7 индикации нормального режима работы, выполненный на базе транзисторов и светодиода, служащего индикацией режима «работа». Блок 6 управления асинхронным двигателем, выполненный с использованием транзисторов, которые управляют катушкой реле, при помощи которого происходит срабатывание контактора и отключается питание асинхронного двигателя. При этом загорается индикация, фиксирующая режим «авария». Блок 8 задания величины скачка и блок 9 задания максимальной массы поднимаемого груза выполнены на базе потенциометров регулирующих настраиваемую величину.
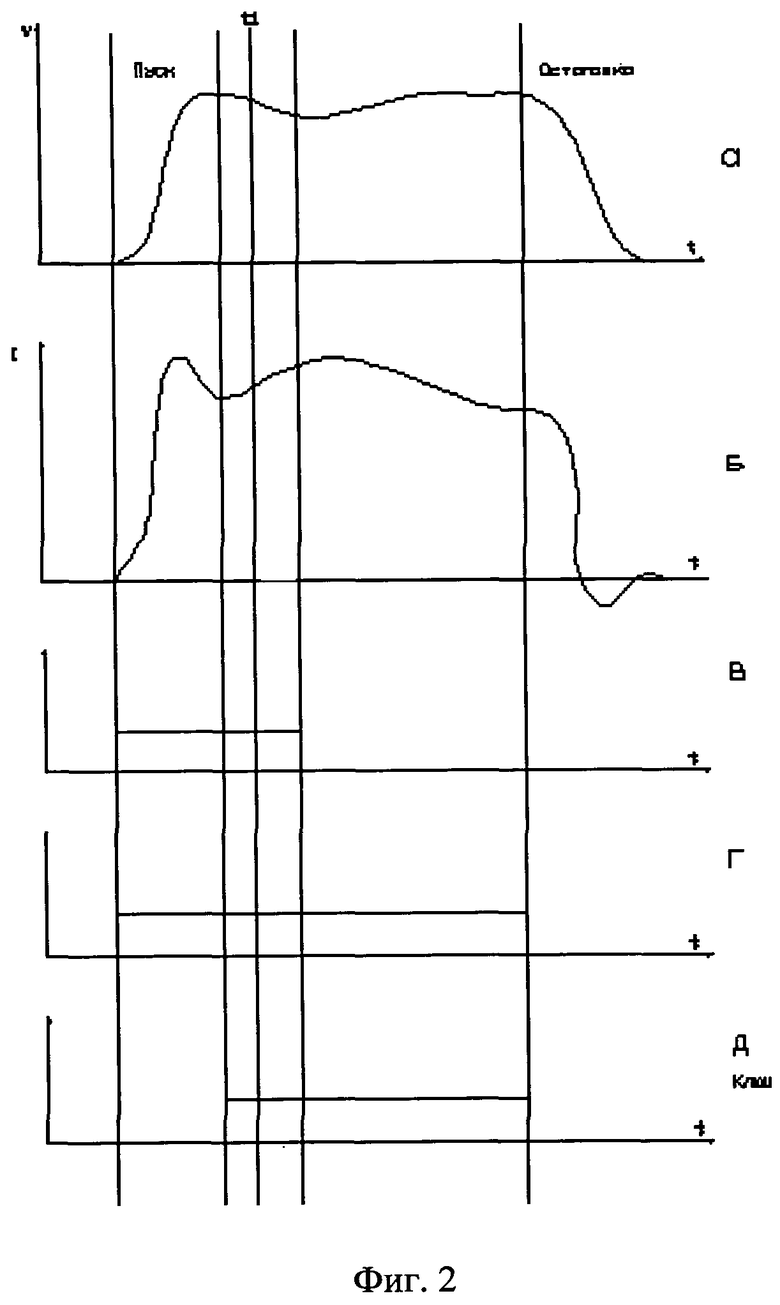
На фиг. 2 (а-д) показаны: а - угловая скорость вращения двигателя; б - ток статора асинхронного двигателя; в - цикл работы устройства при превышении массы груза в процессе работы; г - цикл работы устройства при нормальной массе груза в процессе работы; д - работа ключа.
Устройство ограничения грузоподъемности мостового крана работает следующим образом.
В момент пуска механизма посредством релейной схемы из измерительного блока 1 подается информационный сигнал на блок 2 измерения массы, далее поступает на вход ключа 3 и первого блока 4 сравнения. С первого блока 4 сравнения сигнал подается на вход ключа 3, далее на вход второго блока 5 сравнения, с выхода которого на входы блока 6 управления асинхронным двигателем и блока 7 индикации, с выхода блока 8 задания величины скачка на вход второго блока 5 сравнения, с выхода блока 9 задания максимальной массы поднимаемого груза на вход первого блока 4 сравнения.
В первом блоке 4 сравнения реализуется следующая логическая функция:

где х(τ) - выходной сигнал первого блока 8 сравнения, имеющий два уровня Откл. и Раб.;
mдейс. - величина текущей массы груза;
mmax - величина допустимой массы груза.
Если разность величин mдейc. больше или равна, чем сигнал mmax, то сигнал с выхода первого блока 4 сравнения не проходит на ключ 3 и работа останавливается. В противном случае сигнал не считается аварийным и работа продолжается.
Во втором блоке 5 сравнения реализуется следующая логическая функция:

где y(τ) - выходной сигнал второго блока 5 сравнения;
mтек. - величина текущей массы груза;
mзад. - величина допустимой массы груза;
mск.доп. - величина допустимого скачка массы.
Если разность величин (mтек.-mзад.) будет больше mск.доп., то с выхода второго блока 5 сравнения поступит сигнал на вход блока 6 управления асинхронным двигателем. А в случае, когда сумма величин (mтек.-mзад.) будет приблизительно равна mск.доп., сигнал считается неаварийным.
Включение системы в работу (условно принято за момент времени τ=0) происходит по сигналу (Пуск), показано на фиг. 2в. Этот сигнал подается с местного пульта управления оператором мостового крана.
На фиг. 2а приведен график изменения угловой скорости вращения двигателя. Весь цикл работы состоит из трех участков:
1. Первый участок (x=0÷τ1) - участок разгона, где двигатель движется с ускорением до момента τ1 набора номинальной скорости.
2. Второй участок - участок движения с равномерной скоростью.
3. Третий участок - участок торможения (после команды «Остановка»).
На фиг. 2б приведен график изменения действующих значений тока асинхронного двигателя. Начиная с момента пуска (τ=0) протекает процесс разгона двигателя до установившейся скорости, который длится до момента времени τ1 (3-5 с), после чего ток стабилизируется (так же, как и скорость вращения).
Выходное напряжение U измерительного блока 1 пропорционально току двигателя.
U=Iд*кт.т*Кд.т.
где кт.т - коэффициент трансформатора тока,
кд.т. - коэффициент схемы датчика тока.
График изменения выходного напряжения U повторяет динамику изменения действующих значений тока статора Iд. Выход измерительного блока 1 является информационным входом устройства.
Появление аварийного сигнала обеспечивается последовательным срабатыванием четырех блоков при контроле массы груза на участке включения питания крана и шести блоков при контроле массы груза на протяжении всего периода работы. Точность замера усилий в приводе определяется погрешностью измерительных трансформаторов тока, которая при классе точности 1.0 составляет ±1%.
Таким образом, предлагаемое устройство позволяет распознать наличие перегрузки механизма подъема уже на пределе +1%, что значительно точнее, чем у аналога (10%), и предотвратить развитие аварий, связанных с перегрузкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ КОНВЕЙЕРА ПРИ ОБРЫВЕ ЛЕНТЫ | 2012 |
|
RU2483998C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТУРБОКОМПРЕССОРА ОТ ОСЕВОГО СДВИГА | 2013 |
|
RU2531465C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ КРАНА МОСТОВОГО ТИПА | 2007 |
|
RU2354604C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| Электропривод с частотно-импульсным управлением | 1983 |
|
SU1145445A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ ЭЛЕКТРИЧЕСКОГО КРАНА | 2006 |
|
RU2331572C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Устройство для синхронного перемещения механизмов грузоподъемного средства | 1980 |
|
SU887425A1 |
Устройство содержит измерительный блок (1), сигнал с которого подается на блок (2) измерения массы, далее поступает на вход ключа (3) и первого блока (4) сравнения. С первого блока (4) сравнения сигнал подается на вход ключа (3), с выхода ключа (3) на вход второго блока (5) сравнения, с выхода которого подается на входы блока (6) управления асинхронным двигателем и блока (7) индикации, с выхода блока (8) задания величины скачка на вход второго блока (5) сравнения, с выхода блока (9) задания максимальной массы поднимаемого груза на вход первого блока (4) сравнения. Достигается распознавание перегрузки механизма на пределе +1%, предупреждение аварий, связанных с перегрузкой. 2 ил.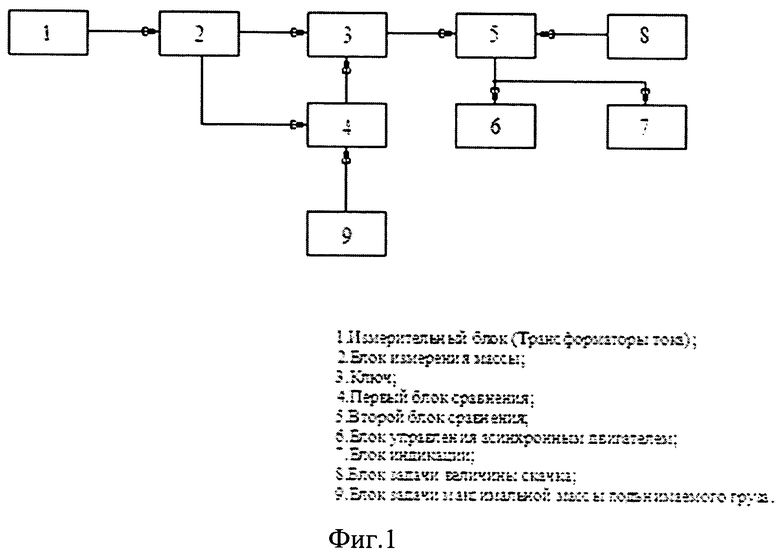
Устройство ограничения грузоподъемности мостового крана, содержащее блок управления асинхронным двигателем, включающий в себя блок управления реле и силовой контактор, отключающий асинхронный двигатель, отличающееся тем, что дополнительно содержит измерительный блок, выполненный на базе трансформаторов тока, включенных первичными обмотками в фазные проводники питающего кабеля обмотки статора электродвигателя, выход которого подключен к входу блока измерения массы, первый выход которого соединен с первым входом ключа, а второй выход поступает на первый вход первого блока сравнения, блок задания максимальной массы поднимаемого груза, выход которого подается на второй вход первого блока сравнения, выход которого поступает на второй вход ключа, выход которого поступает на первый вход второго блока сравнения, выход с которого подается на блок индикации и блок управления асинхронным двигателем, выход блока задания величины скачка подается на второй вход второго блока сравнения.
| Ограничитель грузоподъемности мостового крана | 1976 |
|
SU586093A1 |

