Изобретение относится к устройствам управления подъемными машинами, может быть использовано при автоматизации различных подъемных механизмов.
Целью изобретения является повышение надежности работы подъемной машины.
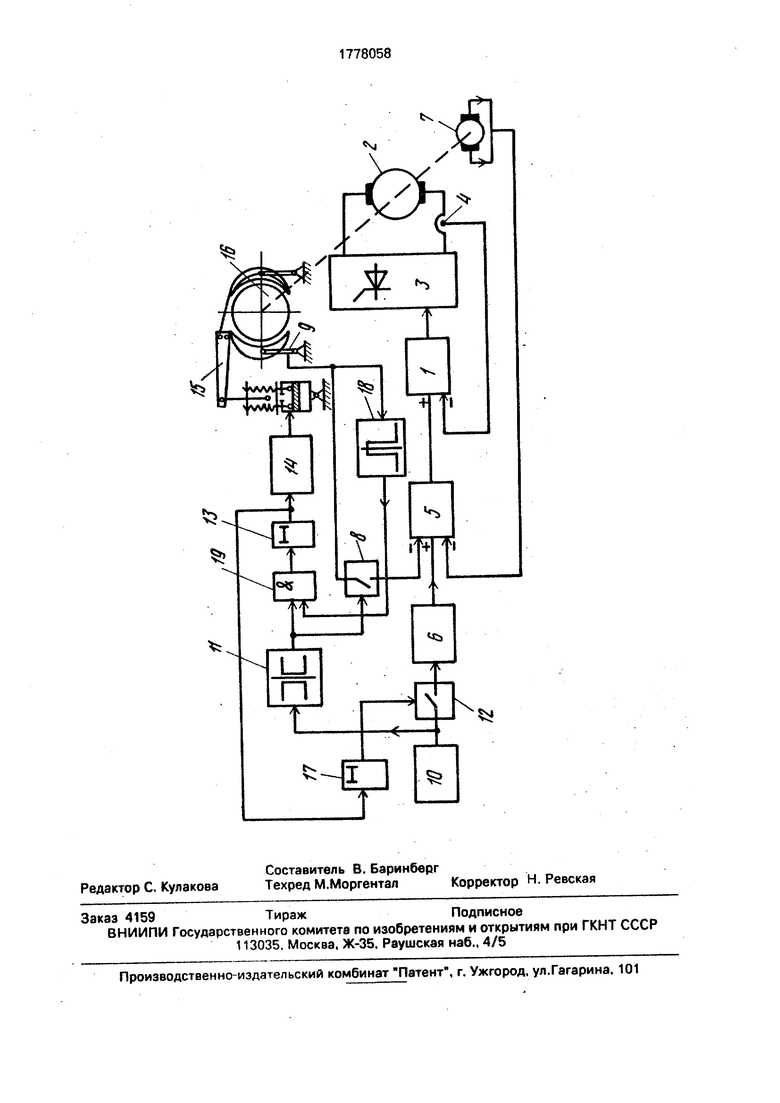
На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит регулятор 1 тока якоря подъемного двигателя 2 с тиристор- ным преобразователем 3. К одному из входов регулятора 1 тока подключен выход датчика 4 тока якоря двигателя, к другому входу - выход регулятора 5 скорости. Первый, второй и третий входы последнего соединены с выходами за датчика 6 интенсивности, датчика 7 скорости и второго управляемого ключа 8. Вход последнего связан с датчиком 9 тормозного момента, в качестве которого может быть использован тензометрический датчик, размещенный на
тормозной балке. При этом измеряется не максимальный потенциально развиваемый тормозной момент, пропорциональный силе нормального давления колодок о тор- 1 мозной обод, а фактически развиваемый тормозной момент, при неподвижной машине, равный
Мт (Мг-Мд).
где Mr, Мд - соответственно момент статический от действия груза и двигательный момент.
Выход блока 10 задания скорости соединен со входом порогового устройства 11 и, через управляемый ключ 12, со входом задатчика интенсивности 6. Выход порогового устройства 11 подключен к управляющему входу ключа 8 и через логический элемент И 19 и блок временной задержки 13, к блоку 14 управления тормозом 15 подъемной машины 16. Выход блока 13 через второй блок 17 временной задержки соединен с управляющим входом ключа 12.
г
Ё
N4 VI
09
СО
Устройство работает следующим образом.
Перед началом пуска подъемная машина 16 заторможена тормозом 15, при этом величина тормозного момента, измеряемого датчиком 9, равна моменту груза. Сигнал заданной скорости подъемной машины 16 поступает от блока 10 задания скорости, в качестве которого может выступать, например, сельсинный командоаппарат. При появлении этого сигнала срабатывает пороговое устройство 11 и замыкается ключ 8, на регулятор 5 скорости подается сигнал обратной связи по тормозному моменту с датчика 9. Поскольку подъемная машина 16 еще неподвижна, сигнал обратной связи по скорости с датчика 7 равен 0. Система оказывается замкнутой по тормозному моменту и работает как система регулирования тормозного момента. Регулятором тормозного момента является регулятор 5 скорости: на его входы поступает задающий сигнал с задатчика 6, равный нулю (так как ключ 12 пока разомкнут), м сигнал обратной связи с датчика 9. Регулятор 5 должен иметь пропорционально-интегральную (ПИ) структуру. Замкнутая система регулирования отрабатывает нулевое задание, в работу вступает внутренний контур регулирования тока со своим регулятором 1 и датчиком 4, появляется напряжение на выходе тири- сторного преобразователя 3 и ток в якоре двигателя 2. Система приходит в устойчивое состояние после того, как ток якоря достигнет значения, при котором тормозной момент (сигнал на выходе датчика 9) станет равным нулю. Происходит полное уравновешивание двигательным моментом момента груза. На выходе нуль-органа 18 появляется логическая единица, поступающая на второй вход элемента И 19. Поскольку на первом его входе также логическая единица (с выхода порогового устройства 11), на выходе логического элемента И 19 также появляется логическая единица, которая прикладывается к блоку 14 управления тормозом 15 через блок 13 временной задержки (выдержка времени необходима для устранения влияния возможного дребезга нуль-органа 18). Происходит растормажива- ние подъемной машины 16. После окончания растормаживания замыкается ключ 12 (уставка блока 17 временной задержки равна или несколько больше времени растормаживания), на вход задатчика 6 интенсивности поступает сигнал с блока 10 задания скорости. На выходе задатчика 6 формируется диаграмма скорости с ограничением рывка, которая отрабатывается системой регулирования скорости. Сигнал с выхода датчика 9 равен нулю (так как машина 16 полностью расторможена) и на характер процесса регулирования скорости не влияет.
Если по каким-либо причинам уравновешивания не произошло (например, из-за перегруза подъемного сосуда, неисправности тиристорного преобразователя 3 и т.п.), на
выходе датчика 9 сигнал не будет равен 0. следовательно, на выходе нуль-органа 18, а значит и на выходе логического элемента 19, окажется логический ноль. Растормажива- ние машины не произойдет, и аварийная
ситуация, связанная с возможной просадкой груженого подъемного сосуда, исключена.
Таким образом, предлагаемое устройство исключает возможность просад ки груженого подъемного сосуда после растормаживания вследствие перегруза или неисправностей в тиристорном преобразователе. Это существенно повышает надежность работы подъемной машины.
Формула изобретения
Устройство для пуска подъемной машины, содержащее блок задания скорости, выход которого соединен через первый управляемый ключ и задатчик интенсивности с первым входом регулятора скорости, выход которого соединен с первым входом регулятора тока якоря двигателя, выход которого соединен с управляющим входом тиристорного преобразователя, соединенного последовательно своими силовыми зажимами с двигателем и датчиком тока якоря двигателя, выход последнего соединен с вторым входом регулятора тока якоря двигателя, установленный соосно с двигателем
датчика скорости соединен с вторым входом регулятора скорости, третий вход которого через второй управляемый ключ соединен с выходом датчика тормозного момента, выход блока задания через пороговый элемент
соединен с управляющим входом второго управляемого ключа, выход первого блока временной задержки соединен через блок управления тормозом с тормозом подъемной машины, а через второй блок временной задержки - с управляющим входом первого управляемого ключа, отличающееся тем, что. с целью повышения надежности в работе подъемной машины, в него введены нуль-орган и элемент И. причем выход датчика тормозного момента через нуль-орган соединен с первым выходом элемента И, второй вход которого соединен с выходом порогового элемента, а выход - с входом первого блока временной задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Устройство для управления подъемной машиной | 1982 |
|
SU1154194A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| Линия продольной резки | 1988 |
|
SU1613215A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод постоянного тока | 1978 |
|
SU942228A1 |
| Электропривод постоянного тока | 1981 |
|
SU957402A1 |
Сущность изобретения: устройство содержит: 1 регулятор тока якоря двигателя, 1 тиристорный преобразователь, 1 датчик тока якоря двигателя, 1 регулятор скорости, 1 задатчик интенсивности, 1 датчик скорости, 2 управляемых ключа, 1 датчик тормозного момента, 1 блок задания скорости, 1 пороговый элемент, 2 блока временной задержки, 1 блок управления тормозом, t тормоз, 1 подъемную машину. 1 нуль-орган, 1 логический элемент И. 1 ил,
| Способ пуска подъемной машины и устройство для его осуществления | 1988 |
|
SU1638092A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
