N)
Изобретение относится к технике подъемных установок, в частности к системам тиристорного управления электроприводом постоянного тока ус- тановок типа шахтных подъемников, и может быть использовано для формирования изменяющегося во времени напряжения, величина которого отображает требуемый закон изменения скорости подъемного сосуда, и является усовершенствованием известного устройства по авт. СЕ, № 1230956.
Целью изобретения является повы шен:не производительности шахтной подъемной установки путем сокращения длительности цикла.при подъеме недогруженных сосудов, и за счет подъема перегруженных сосудов по заданной оптимальной тахограмме.
На чертеже приведена блок-схема предлагаемого устройства для задания режима движения шахтной подъемной установки.
Устройство содержит соединенные последовательно первый линейный операционный усилитель 1 с ограничителем 2 в цепи обратной связи, резистор 3, первьш интегрирующий операционный усилитель 4, выход которого через резистор 5 обратной связи соединен с входом линейного операционного усилителя 1 и через резистор 6 - с входом второго линейного операционного усилителя 7, в цепь обратной связи которого включен резистор 8,при этом задат- чик скорости (не показан) соединен выходом с входами линейных операционных усилителей 1 и 7 через соответствующие резисторы 9 и 10, Выход второго линейного операционного усилителя 7 соединен с входом элемента 11 вьщеле ния модуля, выход которого подключен к двум цепям, одна из которых содержит последовательно соединенные триггер 12, элемент ИЛИ-НЕ 13, элемент 14 задержки и элемент ИЛИ-НЕ 15, а другая цепь - последовательно соединенные триггер 16, элементы ИЛИ-НЕ 17 и 18, элемент 19 задержки, элемен ИЛИ-НЕ 20, выход которого соединен с входом второго интегрирующего операционного усилителя 21 через резистор 22, который через резистор 23 соединен с источником постоянного опорног напряжения Ug. Выход и вход второго интегрирующего операционного усилителя 21 подключены соответственно к уп равляющим входам ох раничителя 2 и к
д ,.
5
0
входам ограничителя 24 в цепи обратной связи, параллельно которому включен конденсатор 25. Управляющие входы ограничителя 24 подключены к выходам третьего линейного операци- онного усилителя 26, содержащего в цепи обратной связи резистор 27. При этом вход третьего линейного операционного усилителя 26 соединен через резистор 28 с выходом элемента ИЛИ-НЕ 15 и через резистор 2S с выходом ключа 30, управляющий вход, которого соединен с выходом блока 31 режима работы, а вход - с выходом четвертого линейного операционного усилителя 32, в цепь обратной связи которого включен резистор 33, а на вход усилителя 32 подключены резисторы 34 и 35, связанные соответственно с выходами источника 36 задания номинального тока нагрузки и второго элемента 37 вьщеления мЬдуля, вход которого соединен с пятым линейным операционным усилителем 38, в цепь обратной связи которого включен резистор 39, а на вход -: резисторы 40 и 41J связанные соответственно с выходами датчика 42 тока и модели 43 двигателя, вход которой соединен с выходом датчика 44 напряжения. Выход первого интегрирующего операционного усилителя 4 подключен к блоку 45 управления двигателем 46, в цепь которого включены датчик 42 тока и датчик 44 напряжения. Двигатель 46 управляет подъемником 47. Первый интегрирующий операционный усилитель 4 содержит конденсатор 48 в цепи обратной связи. Модель 43 двигателя состоит из операционного усилителя 49, в цепь обратной связи которого включены параллельно соединенные резистор 50 и конденсатор 51. Выход операционного усилителя 49 соединен через резисФор 52 с интегрирующим операхдаонным усилителем 53 и является выходом модели 43 двигателя, вход которой соединен через резистор 54 с входом операционного усилителя 49j к которому через резистор 55 подключен выход интегрирующего операционного усилителя 53, в цепь обратной связи которого включен конденсатор 56.
Совокупность таких элементов как датчики тока 42 и напряжения 44, модель 43 электродвигателя, линейный операционный усилитель 38 и резисто3
ры 39, 40 и 41 образует датчик 57 нагрузки электропривода, предназначенный для выделения сигнала, пропорционального статическому току якоря электродвигателя, который в свою очередь пропорционален моменту нагрузки электродвигателя. Источники питания усилителей и логических элементов на схеме не показаны.
На первый вход блока 31 режима работы подается сигнал СО - частоты вращения электродвигателя, а на второй вход - сигнал h - пути, пройденного сосудом.
Блок 31 режима работы может быть реализован на устройстве для регулирования параметров работы электропривода шахтной подъемной установки, у управляющий элемент (реле) которого реализован на элементах типа И-401 серии Логика-И, Ключ 30 представляет собой контакт реле, т,е. контак управляющего элемента, который входи в состав блока 31 режима работы.
Устройство работает следующим образом,
В исходном состоянии, когда нет сигнала U. с выхода задатчика скорости, на входе и выходе линейного операционного усилителя 7 сигнала нет, нет его и на выходе элемента 11 выделения модуля. Поэтому на выходах триггеров 12 и 16 О, на выходах элементов ИЛИ-НЕ 13 и 17 1, на выходах элементов 14 и 19 задержки и ИЛИ-НЕ 48 О, что обеспечивает на выходе элементов ИЛИ-НЕ 15 и 20 1, Уровень сигнала на выходе элемента ИЛИ-НЕ 15 обеспечивает задание номинального ускорения при разгоне и замедлении. Ключ 30 при этом разомкнут, и сигнал с выхода линейного операционного усилителя 32 не проходит на вход линейного операционного усилителя 26, выходное напряжение которого подается в качестве опорног на ограничитель 24 вькодного напряжения интегрирующего операционного усилителя 21, на входе которого имеются два разнополярных сигнала,Так как через резистор 22 протекает больший ток, то на вьпсоде интегрирующего операционного усилителя 21 имеется сигнал, равный опорному на ограничителе 24, который подается в качестве опорного на ограничитель 2, При наличии постоянного напряжения ограничения на линейном операционном
144А265
усилителе 1 и отсутствии сигнала на его входе его выходе, а следо
вательно, и на выходе устройства сигнал отсутствует, что соответствует нулевому току в якорной цепи и нулевой частоте вращения двигателя 46, поэтому на выходах модели 43 двигателя и датчика 42 тока нулевой сигнал. При подаче сигнала на вход U ,ад устройства на входе и выходе линейного операционного усилителя 7 появляется напряжение, при этом сигнал на выходе элемента ИЛИ-НЕ 20 не изменяется, а на выходе элемента ИЛИ-НЕ 15 исчезает на время несколько мс, поэтому конденсатор 25 мгновенно разряжается и затем начинает заряжаться с постоянной времени, соответствующей
выбранному значению рывка в механизме, что обеспечивает линейное изменение напряжения на выходе линейного операционного усилителя 1, а следовательно, квадратичный закон изменения
выходного напряжения устройства, который является оптимальным для шахтных подъемных установок. При появлении напряжения на выходе устройства начинается рост тока в якорной цепи,
и в момент нагрузки происходит плавное трогание двигателя 6 с последующим увеличением частоты вращения до заданной задатчиком скорости, одновременно с началом движения по сигналу с блока 31 задания режима происходит замыкание ключа 30, гфи этом модель 43 двигателя осуществляет моделирование динамического тока,, используя сигнал по напряжению на якоре, который выделяется на выходе датчика 44 напряжения, а сигнал, пропорциональный полному току якоря, поступает с выхода датчика 42 тока. На входе линейного операционного усилителя 32 осуществляется сравнение сигналов с выхода источника 36 номинального тока нагрузки и с выхода элемента 37 выделения модуля, на вход которого поступает сигнал, пропорциональный действительному току нагрузки, с выхода линейного операционного усилителя 38, на входе которого осуществляется суммирование .разнополярных сигналов полного тока и динамического тока.
Разность сигналов полного и динамического токов соответствует сигналу, пропорциональному действительной нагрузке двигателя, которая определе51444265
загрузкой сосудов, поэтому в слупревышения нагрузки или недогрузсосудов сигнал разности тоже преает или меньше задаваемого источом 36 номинального тока нагрузкИг приводит к появлению напряжения выходе линейного операционного лителя 32 соответствующей полярпоти не
Ф же ав щ ни те пр он гр не бл но эл вы те мо ве хш кл на че ус ры
кости, а следовательно происходит уменьшение шш увеличение выходного напряжения линейного операционного
усилителе 26 и соответстаенно уменьшение или увеличение напряжйння на ограв - ч;;;:-аяа 2.,. что соотв.;.. :ству з уыеньшенш кпи увеличению ускорекия при разгоне двигателя. 46,, теким разон ускорение соответс-гвует действительной з грузке сосудов. При ра венсувй Бвшодного напряжения устрой- и вхэдйого процесс разгона заканчиваатся. Торможение начинается BJiMOMeHT исчезновения сигнала . Процесс торможения протекает аналогично процессу пускаj за исключением того, что в момент начала торможения ключ 30 размыкается и выходной иигнал лйне йного операционного усилителя 32 на поступает на вход линейного ояерационного усилителя 26, т.е. не пргшс- 30 ционного усилителя, а управляемый ходит изменения ускорения торможения, вход ключа соединен с выходом блока это необходимо, так как для шахтных режима работы.
подъемных установок строго регламентируется ускорение торможения и оно не должно превышать 1 м/с.
Формула изобретения Устройство для задания режима движения шахтной подъемной установки по авт, ев, № 1230956, отличающееся тем, что, с целью повышения производительности установки пу тем сокращения д,гштельности цикла при подьеме недогруженных сосудов, оно дополнительно содержит нагрузки электропривода S qei epi- ta-; линейный операционный усклителЬ( ключ, блок режима работы, источник задания номинального тока Karpy.3KHj, свторой элемент выделения модуля.,, при этом выход датчика нагрузки электродвигателя через второй элемент вьщеления модуля подключен к первому входу четвертого линейного операционного усиг хштеля, к второму входу которого подключен выход источника задания номинального, тока загрузки, причемJ выкод четвертого линейного операционного усилителя через ключ соединен с йто- рым входом третьего л-инейного опера
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
Изобретение относится к тирис- торному управлению электроприводом постоянного тока шахтных подъемников. Цель - повышение произв-сти установки путем сокращения длительности цикла при подъеме недогруженных сосудов. Для этдго устройство снабжено датчиком 57 нагрузки электропривода, четвертым, линейным операционным усилителем (ЛОУ) 32, ключом 30,. блоком 31 режима работы, источником 36 задания номинального тока (ИНТ) нагрузки и вторым э пементом 37 выделения модуля (ЭВМ). Выход датчика 57 через ЭВМ 37 подключен к первому входу ЛОУ 32, ко второму входу которого подключен- выход ИНТ 36. Выход ЛОУ 32 через ключ 30 соединен с вторым входом ЛОУ 26. К второму входу ЛОУ 6 подключен через последовательно соединенные триггер 12, элемент ИЛИ-НЕ 13, элемент 14 задержки, элемент ШШ-НЕ 15 и резистор 28 выход первого ЭВМ 11, Управляемый вход ключа 30 соединен с выходом блока 31 режима работы. На входе ЛОУ 32 сравниваются сигналы с выходов ИНТ 36 и ЭВМ 37. На вход ЭВМ 37 поступает сигнал, пропорциональный действительному току нагрузки с выхода датчика 57. По сигналу разаости соответствующей полярности с выхода ЛОУ 32 уменьшается или. увеличивается выходное напряжение ЛОУ 26 и ограничителя 2, изменяя ускорение при , разгоне двигателя 46. При торможении размыкается ключ 30. 1 ил. W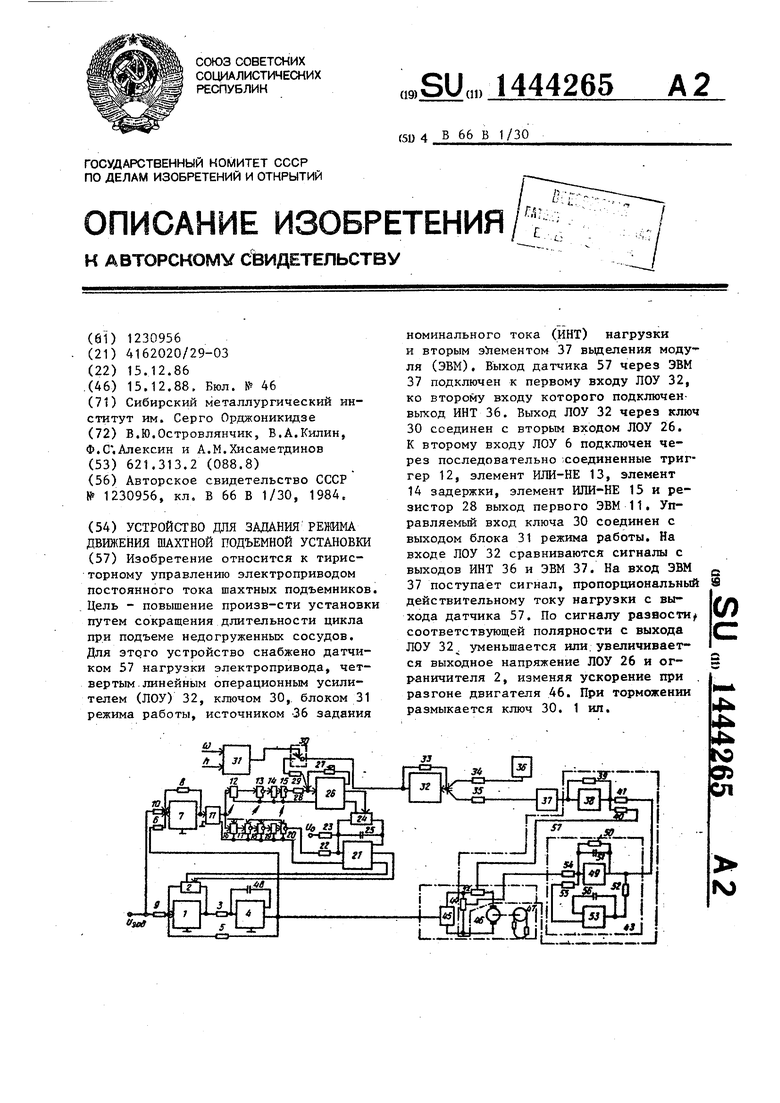
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
