Фиг.1
Изобретение относится к области приборостроения и может быть использовано в качестве элемента гиростабилизатора.
Цель изобретения - повышение точности и расширение области применения.
На фиг. 1 представлена блок-схема ги- ротахометра; на фиг. 2 - диаграммы, поясняющие принцип работы гиротахометра; на фиг. 3 - выходные сигналы схемы синхронизации.
Гиротахометр содержит гироскоп 1 в рамке 2, датчик 3 угла, усилитель 4, интегратор 5, дифференцирующий фильтр 6, преобразователь 7 напряжения в ток и датчик 8 момента. Кроме того, устройство содержит компаратор 9, синхронный генератор 10 одиночных импульсов, триггер 11, формирователь 12 треугольного сигнала, схему 13 совпадения, реверсивный счетчик 14, итоговый регистр 15 и схему 16 синхронизации, причем датчик 3 угла, усилитель 4, интегратор 5, дифференцирующий фильтр 6, преобразователь 7 напряжения в ток и датчик 8 момента соединены последовательно, входы компаратора 9 подключены к интегратору 5 и формирователю 12 треугольного сигнала 12, а выход через синхронный генератор 10 одиночных импульсов, триггер 11, схему 13 совпадения и реверсивный счетчик 14 к итоговому регистру 15, выходы схемы 16 синхронизации соединены с формирователем 12 треугольного сигнала, синхронным генератором 10 одиночных импульсов, схемой 13 совпадения, реверсивным счетчиком 14, итоговым регистром 15, а вход с синхронным генератором 10 одиночных импульсов, выходы интегратора 5, триггера 11 и итогового регистра 15 являются выходами устройства.
Гиротахометр работает следующим образом.
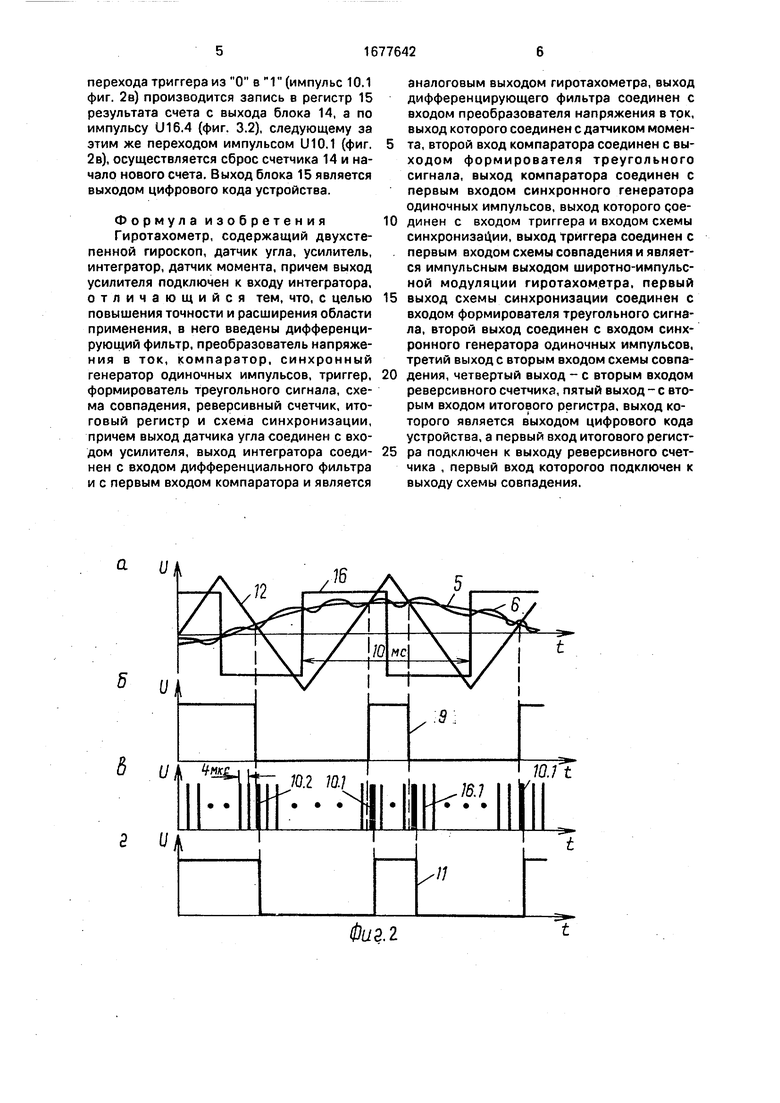
При вращении основания вокруг оси Y с угловой скоростью Wy возникает гироскопический момент Мг, под действием которого рамка 2 гироскопа 1 поворачивается так, что стремится совместить кратчайшим путем вектор кинетического момента Н гироскопа 1 с вектором угловой скорости Wy. При повороте рамки 2 на выходе датчика угла 3 появляется электрический сигнал, который после усиления и интегрирования в блоках 4 и 5 (напряжение U5 фиг. 2а) поступает на дифференцирующий фильтр 6. Сигнал с выхода фильтра 6 (напряжение U6 фиг. 2а) подается на преобразователь 7 напряжения в ток. Ни оси рамки 2 вследствие действия тока преобразователя 7 на датчик момента 8 появляется момент Мп, противодействующий дальнейшему повороту рамки 2. Выход интегратора 5 является аналоговым выходом устройства. Для преобразования аналогового сигнала в широтно-импуль- сный служит компаратор 9, синхронный генератор 10 одиночных импульсов, триггер
11, формирователь 12 треугольного сигнала и схема 16 синхронизации. Собственно преобразование осуществляется в компараторе 9, который производит сравнение аналогового сигнала (напряжение U5 фиг. 2а) с
0 треугольным напряжением (U12 фиг. 2а) выделенным из стабильного по частоте и амплитуде прямоугольного сигнала с выхода схемы синхронизации - U16 фиг, 2а (частота 100 Гц, амплитуда 6,2 В). Если аналоговый
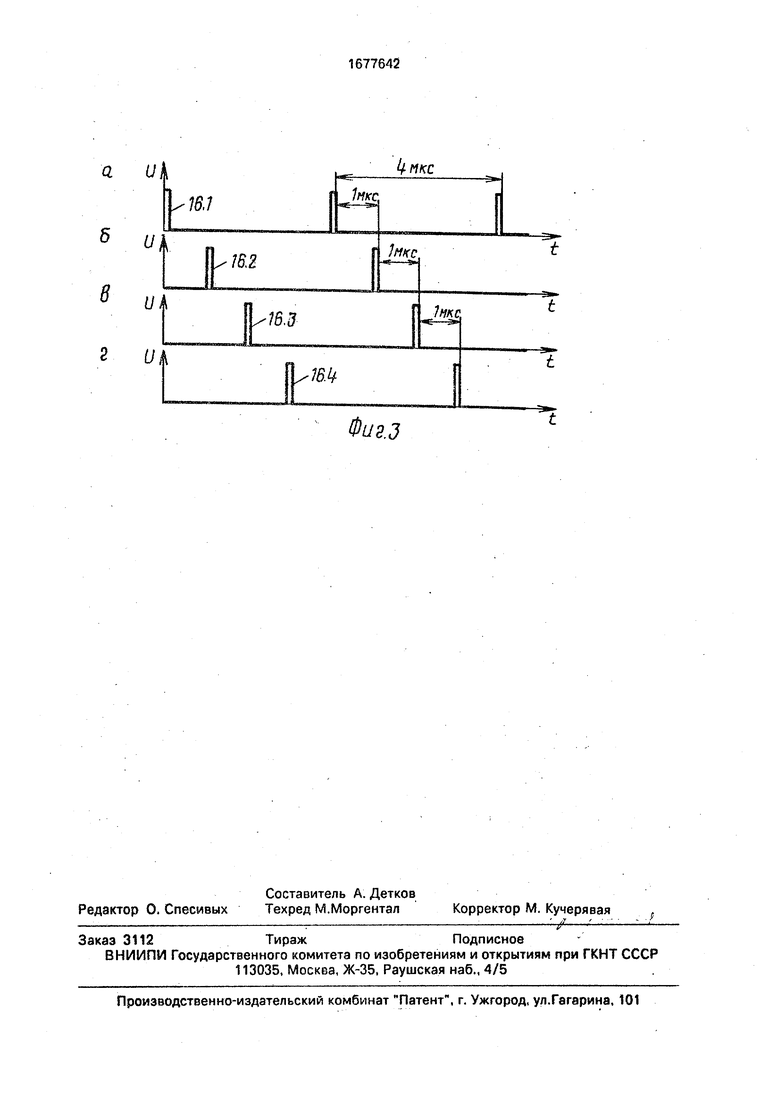
5 сигнал с интегратора 5 меньше треугольного напряжения, то на выходе компаратора 9 высокий логический уровень, если больше, то низкий (напряжение U9 фиг. 26). Для синхронизации выходной импульсный последо0 вательности компаратора 9 служат блоки 10 и 11, работающие под управлением схемы 16, которая вырабатывает четыре импульса, распределенные последовательно во времени (U16.1, U16.2, U16.3, U16.4 фиг. 3) с
5 частотой следования 250 кГц и задержкой относительно друг друга 1 мкс, При смене знака напряжения на выходе компаратора 9 (например, с низкого логического уровня на высокий) генератор 10 по первому пришед0 шему за этим событием импульсу U16.1 вырабатывает одиночный импульс U10.1 (фиг. 2в) установки RS-триггера 11 в состояние 1 (по S входу). Если на выходе блока 9 происходит изменение сигнала с высокого
5 уровня на низкий, то генератор 10 вырабатывает одиночный импульс U10.2 (фиг. 2в) по первому поступившему импульсу U16.1 и устанавливает триггер 11 по R-входу в состояние О. Таким образом, на выходетриг0 гера 11 (напряжение U11 фиг. 2г) формируется сигнал угловой скорости с ши- ротно-импульсной модуляцией, синхронизированный импульсами U16.1 (фиг. За). Преобразование широтно-импульсного сиг5 нала угловой скорости в цифровой код производится в блоках 13-15. Выходное напряжение триггера 11 вместе с импульсами U 16.2 (фиг. 36) с блока 16 поступает на вход схемы 13. При высоком уровне догиче- ского сигнала на выходе триггера 11 импуль0 сы U 16.1 поступают на суммирующий вход счетчика 14, при низком на вычитающий. Цикл измерения, суммирование-вычитание определяется моментами перехода триггера 11 из О в 1, Синхроимпульсы с выхода
5 блока 10, осуществляющие этот переход, подаются на вход схемы 16 и инициализируют выдачу одиночных импульсов U16.3, (Л6.4(фиг. Зв, г) на блоки 14 и 15. По импульсу U 16.3 (фиг. Зв), следующему за моментом
перехода триггера из О в Г1 (импульс 10.1 фиг. 2в) производится запись в регистр 15 результата счета с выхода блока 14, а по импульсу U 16.4 (фиг. 3.2), следующему за этим же переходом импульсом U10.1 (фиг. 2в), осуществляется сброс счетчика 14 и начало нового счета. Выход блока 15 является выходом цифрового кода устройства.
Ф о р м у л а и з о б р е т е н и я
Гиротахометр, содержащий двухстепенной гироскоп, датчик угла, усилитель, интегратор, датчик момента, причем выход усилителя подключен к входу интегратора, отличающийся тем, что, с целью повышения точности и расширения области применения, в него введены дифференцирующий фильтр, преобразователь напряже- ния в ток, компаратор, синхронный генератор одиночных импульсов, триггер, формирователь треугольного сигнала, схема совпадения, реверсивный счетчик, итоговый регистр и схема синхронизации, причем выход датчика угла соединен с входом усилителя, выход интегратора соеди- нен с входом дифференциального фильтра и с первым входом компаратора и является
аналоговым выходом гиротахометра, выход дифференцирующего фильтра соединен с входом преобразователя напряжения в ток, выход которого соединен с датчиком момента, второй вход компаратора соединен с выходом формирователя треугольного сигнала, выход компаратора соединен с первым входом синхронного генератора одиночных импульсов, выход которого qoe- динен с входом триггера и входом схемы синхронизации, выход триггера соединен с первым входом схемы совпадения и является импульсным выходом широтно-импульс- ной модуляции гиротахометра, первый выход схемы синхронизации соединен с входом формирователя треугольного сигнала, второй выход соединен с входом синхронного генератора одиночных импульсов, третий выход с вторым входом схемы совпадения, четвертый выход - с вторым входом реверсивного счетчика, пятый выход - с вторым входом итогового регистра, выход которого является выходом цифрового кода устройства, а первый вход итогового регистра подключен к выходу реверсивного счетчика , первый вход которогоо подключен к выходу схемы совпадения.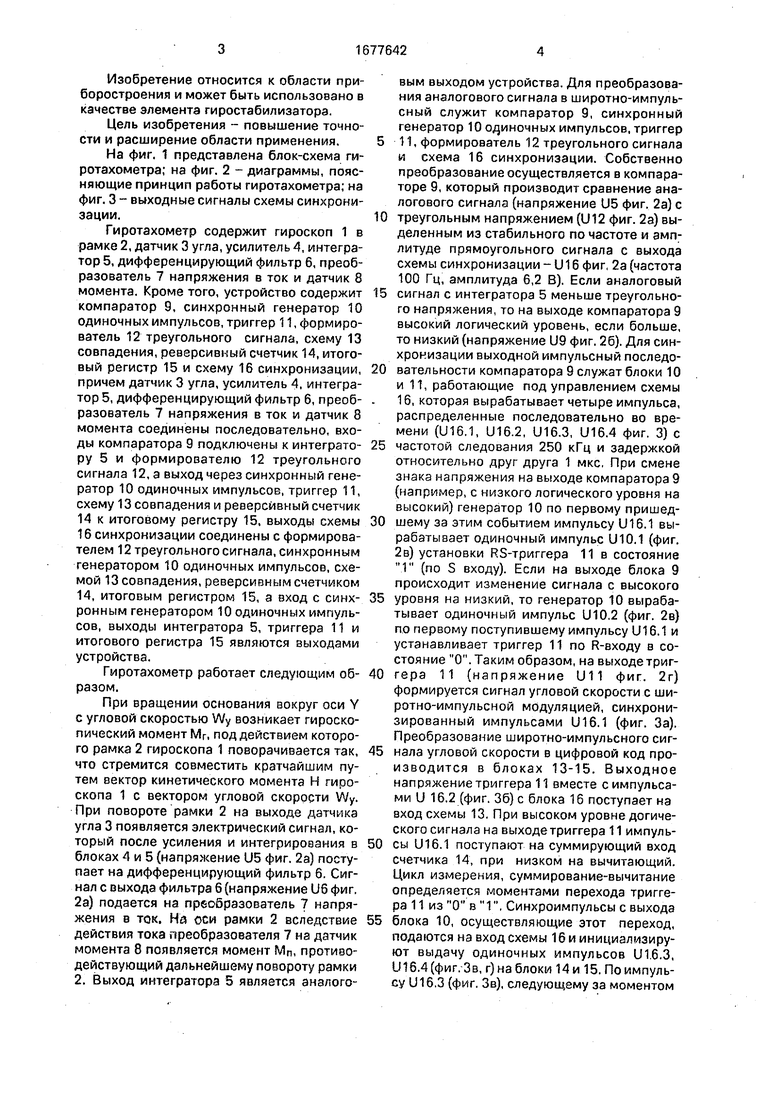
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2260189C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2007 |
|
RU2329513C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2750531C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190858C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2740875C1 |
| Индикаторный гиростабилизатор | 2024 |
|
RU2829814C1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2481588C1 |
Изобретение относится к приборостроению, может быть использовано в качестве элемента гиростабилизатора и позволяет повысить точность измерения и расширить область применения измерителей угловой скорости движущихся объектов. Повышение точности достигается за счет использования в цепи обратной связи усилителя 4, дифференцирующего фильтра 6, интегратора 5 и преобразователя 7 напряжения в ток, которые повышают устойчивость в системе, приводят к нулю статистическую ошибку измерения и снижают погрешность от температурного дрейфа. Расширение области применения осуществляется за счет наличия в гиротахометре трех выходов: аналогового, цифрового и с широтно-импульсной модуляцией, для реализации которых служат компаратор 9, синхронный генератор 10 одиночных импульсов, триггер 11, формирователь 12 треугольного сигнала, схема 13 совпадения, реверсивный счетчик 14, итоговый регистр 15 и схема 16 синхронизации. Зил. л
U
д
а
Фиг.г
ц
Фиг.З
| Гиротахометр | 1984 |
|
SU1230407A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
