Устройство относится к гироскопической технике и предназначено для применения в качестве чувствительного элемента в системах стабилизации, наведения и навигации.
Известно устройство для измерения угловой скорости (Е.А. Никитин, А.А.Балашова. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров. - М.: «Машиностроение», 1969, стр.37-39), содержащее гироузел, датчик угла, преобразователь напряжения в ток, датчик момента. Выход датчика угла подключен через преобразователь напряжения в ток к входу датчика момента.
Недостатком такого устройства является низкая точность измерения и ограниченная область применения. Низкая точность измерения обусловлена отсутствием в цепи обратной связи корректирующих устройств, что не позволяет увеличить коэффициент усиления жесткой обратной связи, ограниченный условием устойчивости системы. Ограничение области применения обусловлено отсутствием в устройстве цифрового выхода.
Наиболее близким (прототипом) является устройство для измерения угловой скорости (авт. св. №1677642, МПК5 G 01 P 9/02, Б.И. №34, 1991 г.), содержащее гироскоп в рамке, датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента. Кроме того устройство содержит компаратор, синхронный генератор одиночных импульсов, триггер, формирователь треугольного сигнала, схему совпадения, реверсивный счетчик, итоговый регистр и схему синхронизации, причем датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента соединены последовательно. Первый вход компаратора соединен с выходом интегратора, второй вход компаратора соединен с выходом формирователя треугольного сигнала, выход компаратора соединен с первым входом синхронного генератора одиночных импульсов, выход которого соединен с входом триггера и соединен с входом схемы синхронизации, выход триггера соединен с первым входом схемы совпадения, первый выход схемы синхронизации соединен с входом формирователя треугольного сигнала, второй выход соединен с вторым входом синхронного генератора одиночных импульсов, третий выход с вторым входом схемы совпадения, четвертый выход - с вторым входом реверсивного счетчика, пятый выход - с вторым входом итогового регистра, первый вход итогового регистра подключен к выходу реверсивного счетчика, первый вход которого подключен к выходу схемы совпадения. Выход интегратора является аналоговым выходом, выход триггера является импульсным выходом широтно-импульсной модуляции, а выход итогового регистра является выходом цифрового кода устройства для измерения угловой скорости.
Недостатком данного устройства является низкая точность измерения, обусловленная наличием апертурной ошибки (В.Г.Карташев. Основы теории дискретных сигналов и цифровых фильтров: Учеб. пособие для вузов. - М.: Высшая школа, 1982. - 109 с.), возникающей при изменении уровня входного сигнала за время преобразования аналогового сигнала в цифровой код.
Задачей изобретения является повышение точности измерения угловой скорости.
Задача решается тем, что предлагаемое устройство для измерения угловой скорости содержит гироскоп в рамке, датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента. Кроме того, устройство содержит компаратор, синхронный генератор одиночных импульсов, триггер, формирователь треугольного сигнала, схему совпадения, реверсивный счетчик, первый итоговый регистр, собирательную схему (схема «или»), суммирующий счетчик, второй итоговый регистр, схему синхронизации, причем датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента соединены последовательно, первый вход компаратора соединен с выходом интегратора, второй вход компаратора соединен с выходом формирователя треугольного сигнала, а выход компаратора соединен с первым входом синхронного генератора одиночных импульсов, выход которого соединен с входом триггера. Выход триггера соединен с первым входом схемы совпадения, выход схемы совпадения соединен с первым входом реверсивного счетчика, а также с входом собирательной схемы, выход реверсивного счетчика соединен с первым входом первого итогового регистра, выход собирательной схемы соединен с первым входом суммирующего счетчика, выход которого соединен с первым входом второго итогового регистра. Первый выход схемы синхронизации соединен с входом формирователя треугольного сигнала, второй выход соединен с вторым входом синхронного генератора одиночных импульсов, третий выход соединен с вторым входом схемы совпадения, четвертый выход соединен с вторым входом реверсивного счетчика, а также с вторым входом суммирующего счетчика, пятый выход соединен с вторым входом первого итогового регистра, а также с вторым входом второго итогового регистра, а вход соединен с выходом синхронного генератора одиночных импульсов. Выход интегратора, триггера, первого итогового регистра, второго итогового регистра являются соответственно аналоговым, широтно-импульсным, цифровым разностным и цифровым суммирующим выходами устройства.
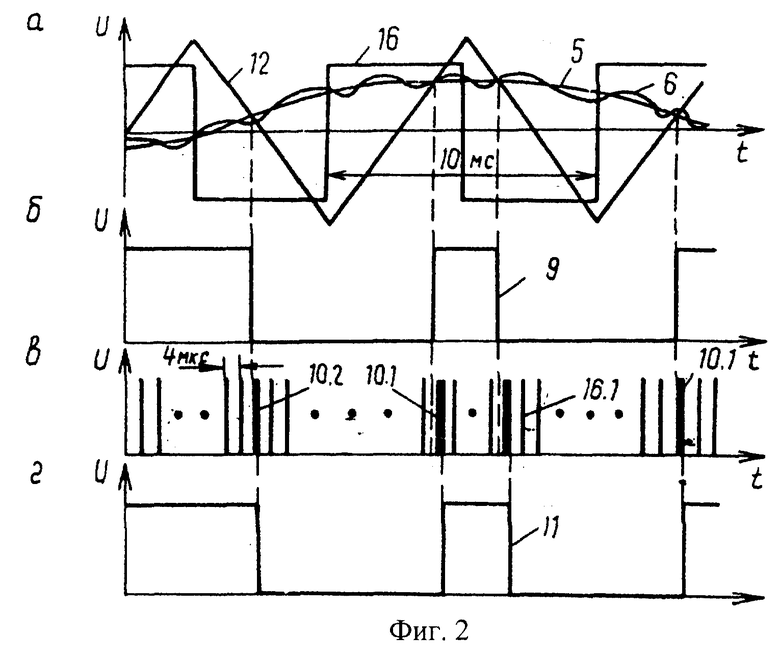
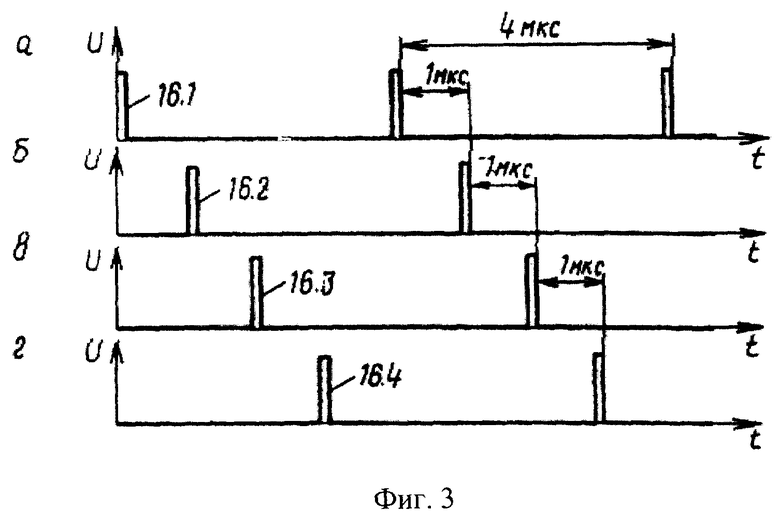
На фиг.1 показана блок-схема устройства для измерения угловой скорости; на фиг.2 - диаграммы, поясняющие принцип работы устройства для измерения угловой скорости; на фиг.3 - выходные сигналы схемы синхронизации; на фиг.4 - диаграмма, поясняющая формулы для вычисления точного значения цифрового кода.
Устройство для измерения угловой скорости содержит гироскоп 1 в рамке 2, датчик угла 3, выход датчика угла соединен с входом усилителя 4, выход которого соединен с входом интегратора 5, выход интегратора 5 соединен с входом дифференцирующего фильтра 6, выход которого соединен с входом преобразователя напряжение - ток 7, выход преобразователя напряжение - ток 7 соединен с входом датчика момента 8, выход интегратора 5 соединен также с первым входом компаратора 9, с вторым входом компаратора 9 соединен выход формирователя треугольного сигнала 12, выход компаратора 9 соединен с первым входом синхронного генератора одиночных импульсов 10, выход которого соединен с входом триггера 11, выход триггера 11 соединен с первым входом схемы совпадения 13, выход схемы совпадения 13 соединен с первым входом реверсивного счетчика 14, а также с входом собирательной схемы 17, выход реверсивного счетчика 14 соединен с первым входом первого итогового регистра,15, выход собирательной схемы 17 соединен с первым входом суммирующего счетчика 18, выход которого соединен с первым входом второго итогового регистра 19. Первый выход схемы синхронизации 16 соединен с входом формирователя треугольного сигнала 12, второй выход соединен с вторым входом синхронного генератора одиночных импульсов 10, третий выход соединен с вторым входом схемы совпадения 13, четвертый выход соединен с вторым входом реверсивного счетчика 14, а также с вторым входом суммирующего счетчика 18, пятый выход соединен с вторым входом первого итогового регистра 15, а также с вторым входом второго итогового регистра 19, а вход схемы синхронизации 16 соединен с выходом синхронного генератора одиночных импульсов 10.
Устройство для измерения угловой скорости работает следующим образом. При вращении оси Y с угловой скоростью WY возникает гироскопический момент Мг, под действием которого рамка 2 гироскопа 1 поворачивается так, что стремится совместить кратчайшим путем вектор кинетического момента Н гироскопа 1 с вектором угловой скорости WY. При повороте рамки 2 на выходе датчика угла 3 появляется электрический сигнал, который после усиления и интегрирования в блоках 4 и 5 (напряжение U5 фиг.2а) поступает на дифференцирующий фильтр 6. Сигнал с выхода фильтра 6 (напряжение U6 фиг.2а) подается на преобразователь 7 напряжения в ток. На оси рамки 2 вследствие действия тока преобразователя 7 на датчик момента 8 подается момент МП, противодействующий дальнейшему повороту рамки 2. Выход интегратора 5 является аналоговым выходом устройства. Для преобразования аналогового сигнала в широтно-импульсный служит компаратор 9, синхронный генератор 10 одиночных импульсов, триггер 11, формирователь 12 треугольного сигнала и схема 16 синхронизации. Собственно преобразование осуществляется в компараторе 9, который производит сравнение аналогового сигнала (напряжение U5 фиг.2а) с треугольным напряжением (U12 фиг.2а), выделенным из стабильного по частоте и амплитуде прямоугольного сигнала с выхода схемы синхронизации - U16 фиг.2а (частота 100 Гц, амплитуда 6,2 В). Если аналоговый сигнал с интегратора 5 меньше треугольного напряжения, то на выходе компаратора 9 высокий логический уровень, если больше, то низкий (напряжение U9 фиг.2б). Для синхронизации выходной импульсной последовательности компаратора 9 служат блоки 10 и 11, работающие под управлением схемы 16, которая вырабатывает четыре импульса, распределенные последовательно во времени (U16.1, U16.2, U16.3, U16.4 фиг.3) с частотой следования 250 кГц и задержкой относительно друг друга 1 мкс. При смене знака напряжения на выходе компаратора 9 (например, с низкого логического уровня на высокий) генератор 10 по первому пришедшему за этим событием импульсу U16.1 вырабатывает одиночный импульс U10.1 (фиг.2в) установки RS-триггера 11 в состояние «1» (по S-входу). Если на выходе блока 9 происходит изменение сигнала с высокого уровня на низкий, то генератор 10 вырабатывает одиночный импульс U10.2 (фиг.2в) по первому поступившему импульсу U16.1 устанавливает триггер 11 по R-входу в состояние «0». Таким образом, на выходе триггера 11 (напряжение U11 фиг.2г) формируется сигнал угловой скорости с широтно-импульсной модуляцией, синхронизированный импульсами U16.1 (фиг.3а). Преобразование широтно-импульсного сигнала угловой скорости в цифровой код производится в блоках 13-19. Выходное напряжение триггера 11 вместе с импульсами U16.2 (фиг.3б) с блока 16 поступает на вход схемы 13. При высоком уровне логического сигнала на выходе триггера 11 импульсы U16.2 поступают на суммирующий вход реверсивного счетчика 14, при низком - на вычитающий. Цикл измерения, суммирование - вычитание определяется моментами перехода триггера 11 из «0» в «1». Синхроимпульсы с выхода блока 10, осуществляющие этот переход, подаются на вход схемы 16 и инициализируют выдачу одиночных импульсов U16.3, U16.4 (фиг.3в, г) на блоки 14 и 15. По импульсу U16.3 (фиг.3в), следующему за моментом перехода триггера из «0» в «1» (импульс U10.1 фиг.2в) производится запись в первый итоговый регистр 15 результата счета с выхода блока 14, а по импульсу U16.4 (фиг.3.г), следующему за этим же переходом (импульс U10.1 фиг.2в), осуществляется сброс реверсивного счетчика 14 и начало нового счета. Выход блока 15 является разностным выходом цифрового кода устройства N-. Сигнал с выхода схемы совпадения 13 поступает на вход собирательной схемы 17, которая обеспечивает подачу импульсов U 16.2 на суммирующий вход суммирующего счетчика 18 независимо от того, высокий уровень логического сигнала на входе триггера 11 или низкий. Цикл измерения суммирование-суммирование определяется моментами перехода триггера 11 из «0» в «1». По импульсу U 16.3 (фиг.3 в), следующему за моментом перехода триггера из «0» в «1» (импульс 10.1 фиг.2.в) производится запись во второй итоговый регистр19 результата счета с выхода суммирующего счетчика 18, а по импульсу U 16.4 (фиг.3.г), следующему за этим же переходом (импульс U10.1 фиг.2 в), осуществляется сброс суммирующего счетчика, 18 и начало нового счета.
Выход второго итогового регистра 19 является суммирующим выходом цифрового кода устройства N+. По разностному значению цифрового кода N- и суммирующему значению цифрового кода N+ вычисляется точное значение цифрового кода Nт, которое на содержит апертурной ошибки, обусловленной изменением уровня аналогового сигнала за время преобразования аналогового сигнала в цифровой код по формулам (1-3):
где  - скорость изменения входного сигнала a(t),
- скорость изменения входного сигнала a(t),
 - крутизна пилы,
- крутизна пилы,
А - амплитуда пилы,
tn - период пилы,
N=tn·fT - число импульсов пилы в периоде пилы,
fT - тактовая частота;
здесь  - относительная величина входного сигнала в момент отсчета;
- относительная величина входного сигнала в момент отсчета;
а - абсолютная величина входного сигнала в момент отсчета;

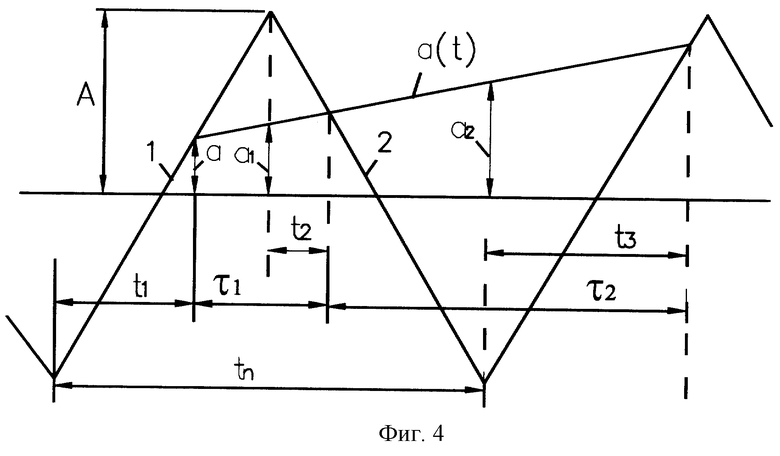
Формулы (1-3) подтверждаются ниже с использованием диаграммы, представленной на фиг.4.
Уравнение пилы:
для участка 1:  ; уn=-А+kt;
; уn=-А+kt;
для участка 2:  ; уn=A-kt;
; уn=A-kt;
Время t1 определяется из равенства:
а=-А+kt1, отсюда  .
.
Значение аналогового сигнала в момент времени  определяется по формуле:
определяется по формуле:

Отрезок времени t2 определяется из равенства:
а1+mt2=А-kt2, отсюда
Длительность времени положительного сигнала τ1 определяется из соотношения:

заменяя  , а=n·А, вынося
, а=n·А, вынося  за скобку и учитывая, что
за скобку и учитывая, что  , получим:
, получим:
Значение аналогового сигнала а2 в момент времени tn определяется из выражения:
 , учитывая, что
, учитывая, что  ,
,
получим:
Определение величины t3:
а2+mt3=-А+kt3; отсюда
Длительность времени τ2 определяется из соотношения:

Делая подстановку ; a=nA; и вынося множитель за скобку, получим:
Найдем отрезок времени:
Найдем отрезок времени τ+=τ1+τ2;
Из уравнения (5) получим формулу (1):
Разделив правую и левую части уравнения (4) на tn, получим формулу (2):

Точное значение цифрового кода в момент отсчета получается на основе (2) по формуле (3). Таким образом совокупность признаков предлагаемого устройства для измерения угловой скорости, реализация которых может быть выполнена в соответствии с фиг.1, позволяет повысить точность измерения угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гиротахометр | 1989 |
|
SU1677642A1 |
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2750531C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190858C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2231075C1 |
| Акселерометр | 2017 |
|
RU2653140C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2740875C1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2481588C1 |
Изобретение предназначено для использования в качестве чувствительного элемента в системах стабилизации, наведения и навигации. Устройство содержит двухстепенный гироскоп, датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента, компаратор, синхронный генератор одиночных импульсов, триггер, формирователь треугольного сигнала, схему совпадения, реверсивный счетчик, два итоговых регистра, схему синхронизации, собирательную схему, суммирующий счетчик, причем выход схемы совпадения соединен с входом собирательной схемы, выход которой соединен с первым входом суммирующего счетчика, выход которого соединен с первым входом второго итогового регистра, а второй вход суммирующего счетчика соединен с четвертым выходом схемы синхронизации, а второй вход второго итогового регистра соединен с пятым выходом схемы синхронизации. Техническим результатом является увеличение точности измерения угловой скорости за счет исключения апертурной ошибки, обусловленной изменением уровня измеряемой величины за время преобразования аналогового сигнала в цифровой код. 4 ил.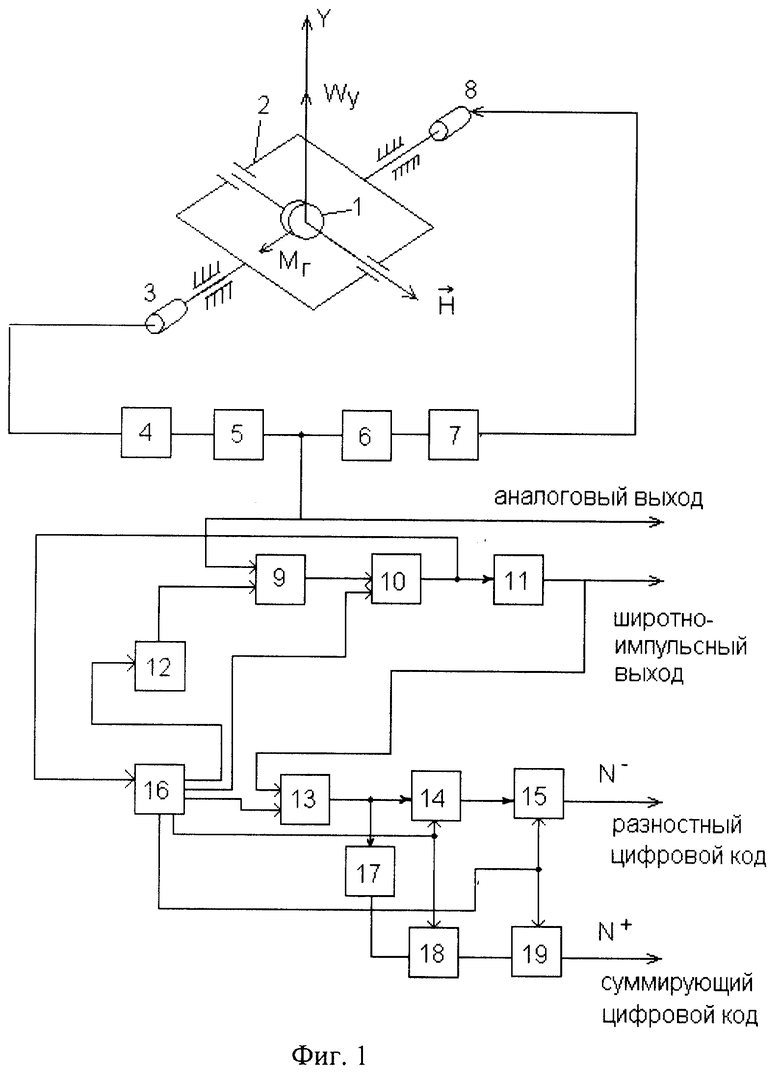
Устройство для измерения угловой скорости, содержащее гироскоп в рамке, датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента, кроме того, устройство содержит компаратор, синхронный генератор одиночных импульсов, триггер, формирователь треугольного сигнала, схему совпадения, реверсивный счетчик, первый итоговый регистр, схему синхронизации, причем датчик угла, усилитель, интегратор, дифференцирующий фильтр, преобразователь напряжения в ток и датчик момента соединены последовательно, первый вход компаратора соединен с выходом интегратора, второй вход компаратора соединен с выходом формирователя треугольного сигнала, а выход компаратора соединен с первым входом синхронного генератора одиночных импульсов, выход которого соединен с входом триггера, выход триггера соединен с первым входом схемы совпадения, выход схемы совпадения соединен с первым входом реверсивного счетчика, выход реверсивного счетчика соединен с первым входом первого итогового регистра, первый выход схемы синхронизации соединен с входом формирователя треугольного сигнала, второй выход схемы синхронизации соединен с вторым входом синхронного генератора одиночных импульсов, третий выход схемы синхронизации соединен с вторым входом схемы совпадения, четвертый выход схемы синхронизации соединен с вторым входом реверсивного счетчика, пятый выход схемы синхронизации соединен с вторым входом первого итогового регистра, а вход схемы синхронизации соединен с выходом синхронного генератора одиночных импульсов, выход интегратора, триггера и первого итогового регистра являются соответственно аналоговым, широтно-импульсным и цифровым разностным выходами устройства, отличающееся тем, что в него дополнительно введены собирательная схема, суммирующий счетчик, второй итоговый регистр, причем выход схемы совпадения соединен с входом собирательной схемы, выход которой соединен с первым входом суммирующего счетчика, выход которого соединен с первым входом второго итогового регистра, а второй вход суммирующего счетчика соединен с четвертым выходом схемы синхронизации, а второй вход второго итогового регистра соединен с пятым выходом схемы синхронизации, выход второго итогового регистра является цифровым суммирующим выходом устройства.
| Гиротахометр | 1989 |
|
SU1677642A1 |
| Гиротахометр | 1984 |
|
SU1230407A1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2184937C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2006868C1 |
| US 6467347 В1, 22.10.2002 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

