Изобретение относится к приборостроению и может быть использовано в качестве элемента навигационной системы.
Цель изобретения - повьшение точности гиротахометра
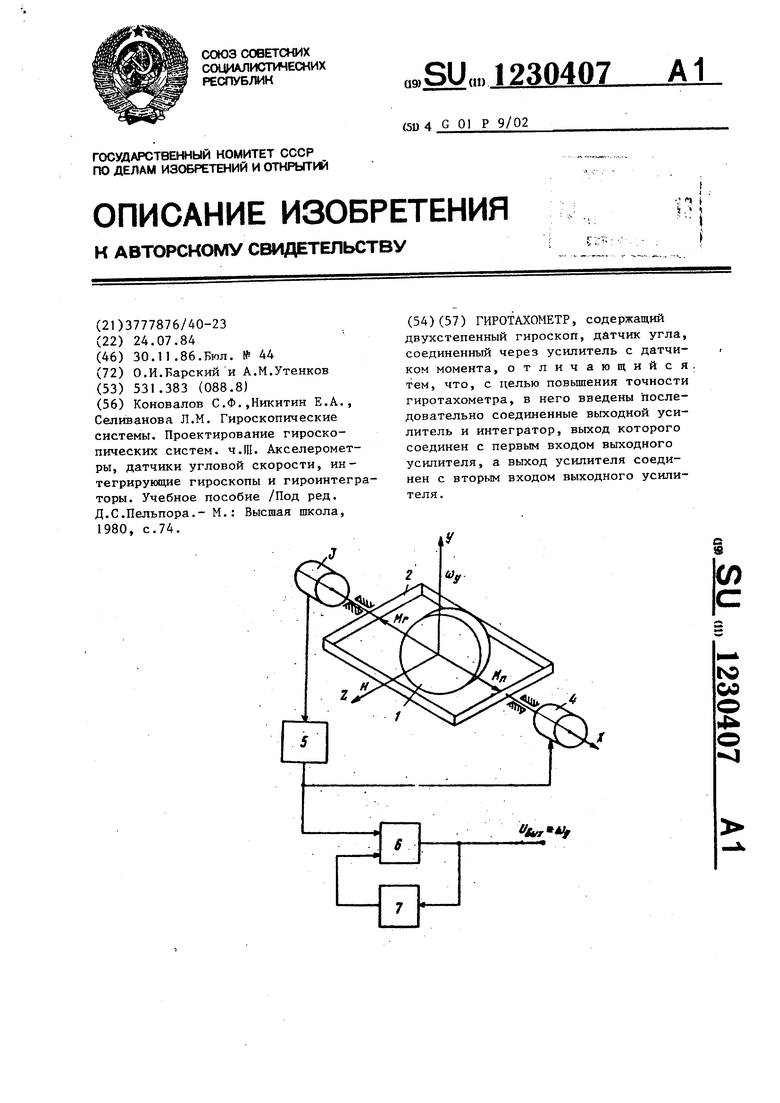
На чертеже изображена схема гиро- тахометра.
Гиротахометр содержит гироскоп 1 в рамке 2, датчик 3 угла, датчики 4 момента, усилитель 5, выходной усилитель 6 и интегратор 7.
При вращении основания вокруг оси У с угловой скоростью W у возникает гироскопический момент Н , под действием которого рамка 2 гирос копа 1 поворачиваете так, что стремится совместить кратчайшим путем вектор кинетического момента Н гироскопа 1 с вектором угловой скорости Wj. При повороте рамки 2 на выходе датчика 3 угла появляется электрический си гнал, который после усиления усилителем 5 поступает на обмотку датчика 4 момента. При этом на оси рамки 2 появляется момент М,
Составитель М.Лавриненко Редактор Л.Волкова Техред П. Бойкапо Корректор Л. Пилипенко
Заказ 6501/4 Тираж 778Подписное
ВНИИПИ Государственного комитета- СССР
по делам изобретений и открытий 113035, Москва, Жт35, Раушская наб., д.4/5
„Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная,4.
5
0
5
противодействующий дальнейшему повороту рамки 2. Таким образом, противодействующий момент Mj4 пропорционален сумме воздействукщих на гироскоп моментов: полезного, пропорционального угловой скорости поворота основания, и вредного, вызванного вертикальной составляющей угловой скорое- ти суточного вращения Земли и остаточной несбалансированностью гироскопа I и рамки 2. Ток датчика 4 момента, пропорциональный противодействующему моменту М,, поступает на второй вход выходного усилителя 6. К выходу выходного усилителя подключен вход интегратора 7, которьш выделяет постоянную и медленно меняющуюся составляющие выходного сигнала и подает их на первый вход выходного усилителя 6. При этом постоянная и медленно меняющаяся составляющие выходного сигнала уменьшаются, а полезный сигнал, пропорциональный угловой скорости поворота объекта, формируется на выходе выходного усилителя без ослабления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гиротахометр | 1989 |
|
SU1677642A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2260189C1 |
| Устройство для определения угла наклона подвижного объекта | 1983 |
|
SU1081414A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ИНЕРЦИАЛЬНОГО УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА НЕПОДВИЖНЫЙ ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ АВТОНОМНОГО САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ НА НЕПОДВИЖНЫЙ ОБЪЕКТ ВИЗИРОВАНИЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387056C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПИЧЕСКОГО СТАБИЛИЗАТОРА | 2003 |
|
RU2270418C2 |
| Коновалов С.Ф.,Никитин Е.А., Селиванова Л.М | |||
| Гироскопические системы | |||
| Проектирование гироскопических систем | |||
| ч.Ш | |||
| Акселерометры, датчики угловой скорости, ин- тегрируюпще гироскопы и гироинтегра- торы | |||
| Учебиое пособие /Под ред | |||
| Д.С.Пельпора.- М.: Высшая школа, 1980, с.74. |
