Изобретение относится к контрольно- испытательной технике и может быть использовано для контроля герметичности магистральных газопроводов.
Целью изобретения является повышение точности определения мест утечек путем более точной регистрации мест расположения реперных отметок.
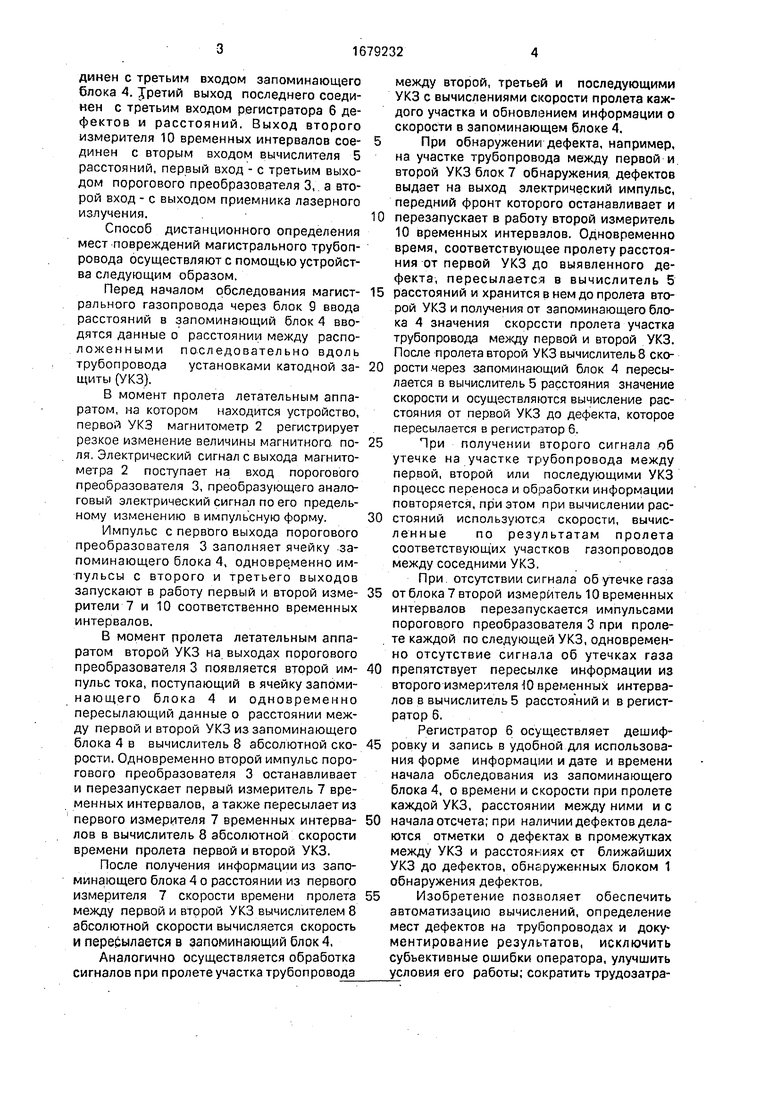
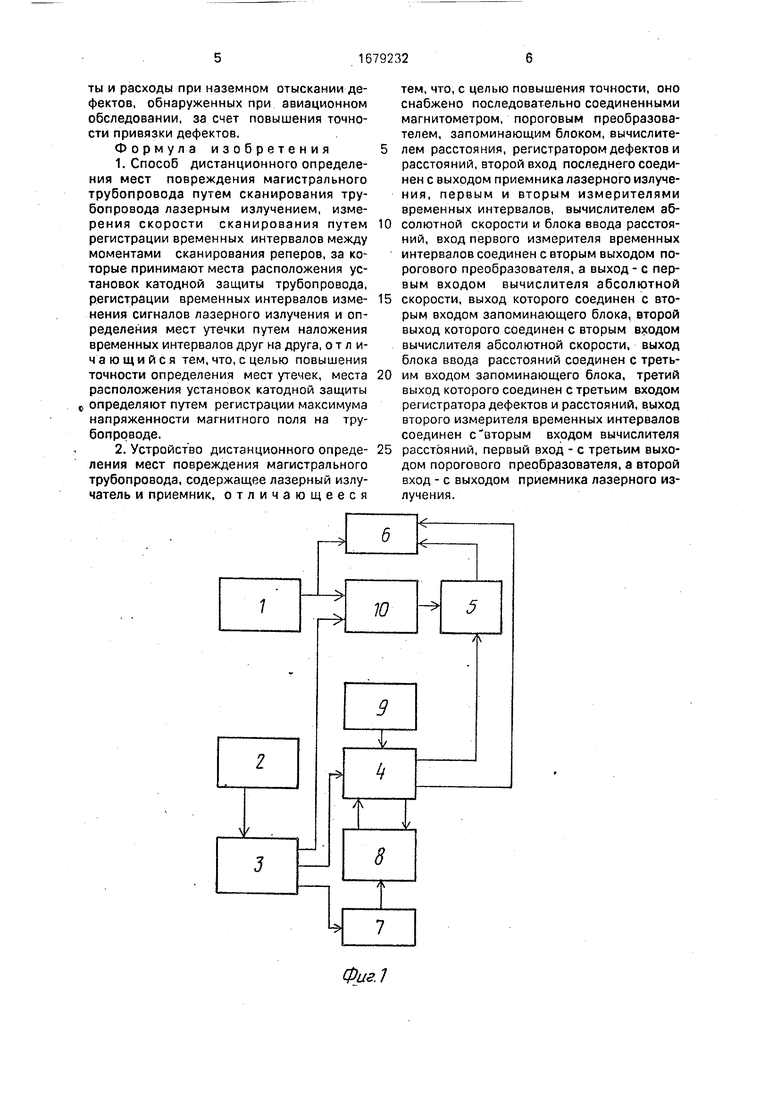
На фиг.1 изображена структурная схема устройства; на фиг.2-электрическая схема расп - ределения тока катодной защиты;на фиг. 3 - характер изменения тока фиг. 1;
Устройство дистанционного определения мест повреждения магистрального трубопровода содержит блок 1 обнаружения дефектов, содержащий лазерный излучатель и приемник (на чертеже не показаны), последовательно соединенные магнитометр 2, пороговый преобразователь 3, запоминающий блок 4, вычислитель 5 расстояния, регистратор 6 дефектов и расстояний. Второй вход последнего соединен с выходом приемника лазерного излучения. Вход первого измерителя 7 временных интервалов соединен с .вторым выходом порогового преобразователя 3, а выход - с первым входом вычислителя 8 абсолютной скорости, Выход последнего соединен вторым входом запоминающего блока 4, второй выход которого соединен вторым входом вычислителя 8 абсолютной скорости. Выход блока 9 ввода расстояний соео XI о кэ со го
динен с третьим входом запоминающего блока А. уретий выход последнего соединен с третьим входом регистратора б дефектов и расстояний. Выход второго измерителя 10 временных интервалов соединен с вторым входом вычислителя 5 расстояний, первый вход - с третьим выходом порогового преобразователя 3, а второй вход - с выходом приемника лазерного излучения.
Способ дистанционного определения мест повреждений магистрального трубопровода осуществляют с помощью устройства следующим образом.
Перед началом обследования магистрального газопровода через блок 9 ввода расстояний в запоминающий блок 4 вводятся данные о расстоянии между расположенными последовательно вдоль трубопровода установками катодной защиты (У КЗ).
В момент пролета летательным аппаратом, на котором находится устройство, первой УКЗ магнитометр 2 регистрирует резкое изменение величины магнитного поля Электрический сигнал с выхода MSI питометра 2 поступает на вход порогового преобразователя 3, преобразующего аналоговый электрический сигнал по его предельному изменению в импульсную форму.
Импульс с первого выхода порогового преобразователя 3 заполняет ячейку запоминающего блока 4, одновременно импульсы с второго и третьего выходов запускают в работу первый и второй измерители 7 и 10 соответственно временных интервалов.
В момент пролета летательным аппаратом второй УКЗ на выходах порогового преобразователя 3 появляется второй импульс тока, поступающий в ячейку запоми- нающего блока 4 и одновременно пересылающий данные о расстоянии между первой и второй УКЗ из запоминающего блока 4 в вычислитель 8 абсолютной скорости. Одновременно второй импульс порогового преобразователя 3 останавливает и перезапускает первый измеритель 7 временных интервалов, а также пересылает из первого измерителя 7 временных интервалов в вычислитель 8 абсолютной скорости времени пролета первой и второй УКЗ.
После получения информации из запоминающего блока 4 о расстоянии из первого измерителя 7 скорости времени пролета между первой и второй УКЗ вычислителем 8 абсолютной скорости вычисляется скорость и пересылается в запоминающий блок 4,
Аналогично осуществляется обработка сигналов при пролете участка трубопровода
между второй, третьей и последующими УКЗ с вычислениями скорости пролета каждого участка и обновлением информации о скорости в запоминающем блоке 4.
При обнаружении дефекта, например,
на участке трубопровода между первой и второй УКЗ блок 7 обнаружения дефектов выдает на выход электрический импульс, передний фронт которого останавливает и
0 перезапускает в работу второй измеритель 10 временных интервалов. Одновременно время, соответствующее пролету расстояния от первой УКЗ до выявленного дефекта, пересылается в вычислитель 5
5 расстояний и хранится в нем до пролета второй УКЗ и получения от запоминающего блока 4 значения скорости пролета участка трубопровода между первой и второй УКЗ. После пролета второй У КЗ вычислитель 8 ско0 рости через запоминающий блок 4 пересылается в вычислитель 5 расстояния значение скорости и осуществляются вычисление расстояния от первой УКЗ до дефекта, которое пересылается в регистратор 6.
5 При получении второго сигнала об утечке на участке трубопровода между первой, второй или последующими УКЗ процесс переноса и обработки информации повторяется, при этом при вычислении рас0 стояний используются скорости, вычисленные по результатам пролета соответствующих участков газопроводов между соседними УКЗ.
При отсутствии сигнала об утечке газа
5 от блока 7 второй измеритель 10 временных интервалов перезапускается импульсами порогового преобразователя 3 при пролете каждой по следующей УКЗ, одновременно отсутствие сигнала об утечках газа
0 препятствует пересылке информации из второго измерителя -10 временных интервалов в вычислитель 5 расстояний и в регистратор 6.
Регистратор 6 осуществляет дешиф5 ровку и запись в удобной для использования форме информации и дате и времени начала обследования из запоминающего блока 4, о времени и скорости при пролете каждой УКЗ, расстоянии между ними и с
0 начала отсчета; при наличии дефектов делаются отметки о дефектах в промежутках между УКЗ и расстояниях от ближайших УКЗ до дефектов, обнаруженных блоком 1 обнаружения дефектов,
5 Изобретение позволяет обеспечить автоматизацию вычислений, определение мест дефектов на трубопроводах и документирование результатов, исключить субъективные ошибки оператора, улучшить условия его работы; сократить трудозатраты и расходы при наземном отыскании дефектов, обнаруженных при авиационном обследовании, за счет повышения точности привязки дефектов.
Формула изобретения5
1.Способ дистанционного определения мест повреждения магистрального трубопровода путем сканирования трубопровода лазерным излучением, измерения скорости сканирования путем 10 регистрации временных интервалов между моментами сканирования реперов, за которые принимают места расположения установок катодной защиты трубопровода, регистрации временных интервалов изме- 15 нения сигналов лазерного излучения и определения мест утечки путем наложения временных интервалов друг на друга, отличающийся тем, что, с целью повышения точности определения мест утечек, места 20 расположения установок катодной защиты
определяют путем регистрации максимума напряженности магнитного поля на трубопроводе.
2.Устройство дистанционного опреде- 25 ления мест повреждения магистрального трубопровода, содержащее лазерный излучатель и приемник, отличающееся
тем, что, с целью повышения точности, оно снабжено последовательно соединенными магнитометром, пороговым преобразователем, запоминающим блоком, вычислителем расстояния, регистратором дефектов и расстояний, второй вход последнего соединен с выходом приемника лазерного излуче- ния, первым и вторым измерителями временных интервалов, вычислителем абсолютной скорости и блока ввода расстояний, вход первого измерителя временных интервалов соединен с вторым выходом порогового преобразователя, а выход - с первым входом вычислителя абсолютной скорости, выход которого соединен с вторым входом запоминающего блока, второй выход которого соединен с вторым входом вычислителя абсолютной скорости, выход блока ввода расстояний соединен с третьим входом запоминающего блока, третий выход которого соединен с третьим входом регистратора дефектов и расстояний, выход второго измерителя временных интервалов соединен с вторым входом вычислителя расстояний, первый вход - с третьим выходом порогового преобразователя, а второй вход - с выходом приемника лазерного излучения.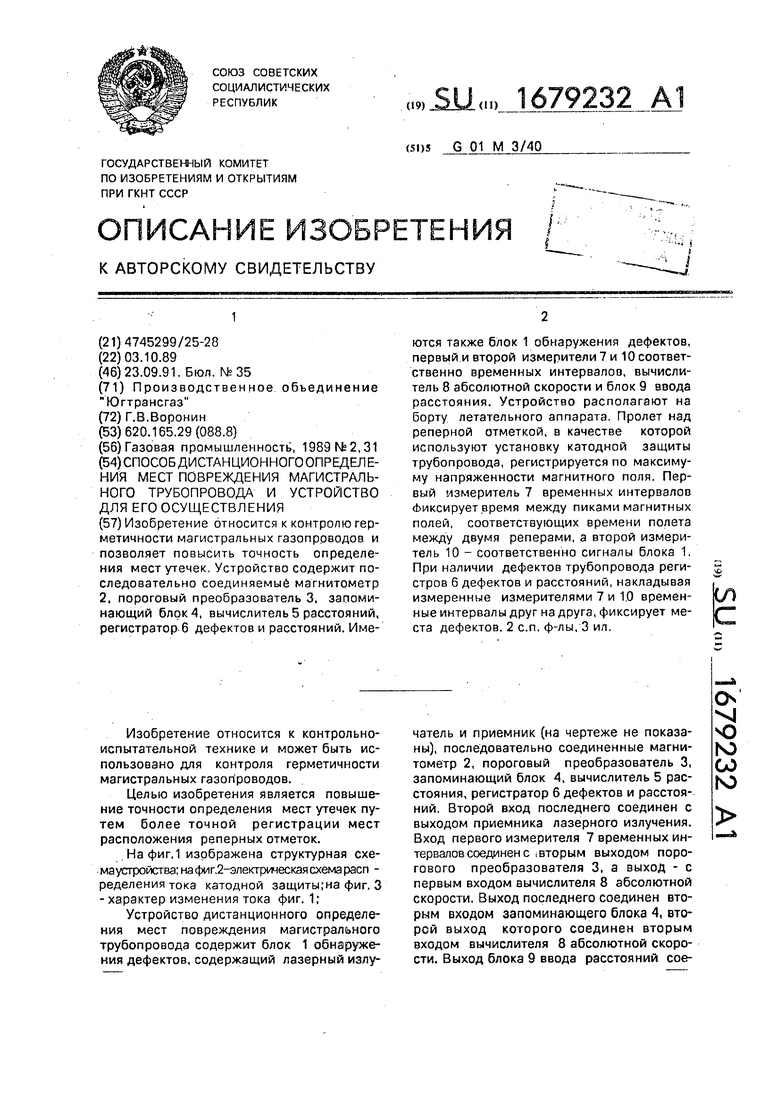
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА КАТОДНОЙ ЗАЩИТЫ | 2008 |
|
RU2379673C1 |
| СПОСОБ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ БОРТОВЫМИ ДИАГНОСТИЧЕСКИМИ СИСТЕМАМИ И СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ УТЕЧКИ ГАЗА | 2000 |
|
RU2201584C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СИСТЕМА КОНТРОЛЯ ПЕРЕХОДА ТРУБОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ ПОД АВТО- И ЖЕЛЕЗНЫМИ ДОРОГАМИ | 2004 |
|
RU2264578C1 |
| Устройство для определения координат дефектов | 1986 |
|
SU1387658A1 |
| Устройство для измерения физических величин с цифровой регистрацией | 1980 |
|
SU924641A1 |
Изобретение относится к контролю герметичности магистральных газопроводов и позволяет повысить точность определения мест утечек. Устройство содержит последовательно соединяемые магнитометр 2, пороговый преобразователь 3, запоминающий блок 4, вычислитель 5 расстояний, регистратор 6 дефектов и расстояний. Имеются также блок 1 обнаружения дефектов, первый и второй измерители 7 и 10 соответственно временных интервалов, вычислитель 8 абсолютной скорости и блок 9 ввода расстояния. Устройство располагают на борту летательного аппарата. Пролет над реперной отметкой, в качестве которой используют установку катодной защиты трубопровода, регистрируется по максимуму напряженности магнитного поля. Первый измеритель 7 временных интервалов Фиксирует время между пиками магнитных полей, соответствующих времени полета между двумя реперами, а второй измеритель 10 - соответственно сигналы блока 1. При наличии дефектов трубопровода регистров 6 дефектов и расстояний, накладывая измеренные измерителями 7 и 10 временные интервалы друг на друга, фиксирует места дефектов. 2 с.п. ф-лы, 3 ил. сл с
Фие.1
SjAeB 3inpa8 - 7
Ззлед J2npao - 2 .
л
Ч J/A-Q/77.
XNJQi
-
- /// V2«im. //
/ /
+///
источники постоянного тока
Так , напряженность магнитного поля
3;леВ
О
J/ 0/70
1 70дм
J2npao .
//Л
/ / /ч . .i
+/// кат // /защ.
Грунт
и
Заземление
6/2,2
3%леЬ
г
J.7 лей
5
J2npa6
J лра
/
| Газовая промышленность, 1989Мг2,31 |
