Система относится к устройствам контрольно-измерительной техники. Она предназначена для пространственного позиционирования точек продольной оси подземного магистрального трубопровода с помощью бесплатформенной инерциальной системы ориентации и навигации, а также датчика пути и других приборов, устанавливаемых на борту внутритрубного инспектирующего снаряда и на земле.
Уровень техники в данной области характеризуется приведенными ниже сведениями.
Известна инерциальная система контроля за трубопроводом (Пат. USA №4945775, G01C 9/06, 1990), содержащая снаряд-носитель, имеющий несколько полиуретановых скребков для обеспечения движения снаряда в потоке продукта, бесплатформенную инерциальную систему навигации, включающую триаду акселерометров и гироскопов, одометры, вычислитель, устройства и датчики неинерциальной природы для диагностики состояния трубопровода. Недостатком данной системы является сложность и необходимость применения прецизионных датчиков первичной информации (бесплатформенной инерциальной системы и одометров), что во многих случаях неприемлемо для реализации из-за чрезмерно высокой стоимости.
Наиболее близким аналогом предлагаемого изобретения является Система определения координат трассы подземного трубопровода (Патент РФ №2197714, МПК G01B 17/00, F17D 5/00, 2003). Система представляет собой внутритрубный инспектирующий снаряд (ВИС), включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления, регистратор, трехкомпонентные гироскопический измеритель угловой скорости и акселерометр, размещенные внутри контейнера, три ряда ультразвуковых приемопередающих преобразователей (УЗП), расположенных по окружностям попарно и диаметрально противоположно на внешней поверхности по n в каждом ряду в носовой, хвостовой и средней частях контейнера, подключенные к информационным входам блока вычислений и управления, акселерометр широкого диапазона измерения по продольной оси контейнера, три усилителя, соединенные своими входами с выходами трехкомпонентного измерителя угловой скорости, датчики сигналов маркеров с аналого-цифровым преобразователем, контроллером и датчик температуры, установленный внутри контейнера.
При этом регистратор выполнен в виде переносного долговременного запоминающего устройства, а блок вычислений и управления - в виде бортового процессора и наземной подсистемы в составе блоков ввода данных маркерных точек, переключения диапазонов гироскопических измерителей угловой скорости и переключения продольных акселерометров, вычисления сигналов коррекции по углам тангажа и крена, вычисления оценок параметров ориентации герметичного контейнера ВИС, идентификации смещения нулей инерциальных датчиков (гироскопических измерителей угловой скорости и акселерометров), а также устройства согласования, сумматора, вычислителя декартовых координат, фильтра нижних частот, детектора уровня вибрации и устройства сравнения.
Недостатком данного изобретения является сложность технологии использования УЗП при обследовании газопроводов: с помощью специальных поршней, располагаемых перед и после ВИС, в газопроводе около ВИС должна быть реализована «водяная пробка», перемещающаяся вместе с ним потоком газа. Для обеспечения достоверности результатов обследования скорость движения ВИС ограничивается отраслевыми стандартами ГАЗПРОМа уровнем в 4 м/с. В последние годы газпромом введено требование оснащения ВИС устройствами перепуска газа (байпасом), которые позволяют снять ограничения на скорость газового потока при проведении внутритрубных обследований. Однако в этих условиях технология «водяной пробки» не реализуема. При движении ВИС по газопроводу в потоке газа манжеты и щетки-магнитопроводы (в случае ВИС-дефектоскопа) отделяют от внутренней поверхности трубы грязь и продукты коррозии, которые в виде плотного мелкодисперсного облака перемещаются вместе с ВИС и впереди него, практически ослепляя УЗП, что резко снижает возможности идентификации углового смещения продольной оси ВИС относительно оси трубы с помощью УЗП. Данное угловое смещение может быть обусловлено несоосностью передней и задней эластичных манжет из-за погрешностей их монтажа и неравномерности износа при движении по трубопроводу, а также различием сопротивления движению верхних и нижних частей манжет. Это приводит к значительным погрешностям определения координат трассы газопровода.
Технический результат изобретения состоит в повышении точности определения координат трассы трубопровода за счет компенсации погрешностей, обусловленных угловым смещением продольной оси ВИС относительно продольной оси трубы. При этом определение углового смещения осуществляется на основе использования сигналов инерциальных датчиков и одометра, т.е. без использования дополнительных датчиков положения ВИС относительно трубы. Это обеспечивает высокую помехозащищенность определения параметров углового смещения ВИС по сравнению с использованием УЗП при одновременном упрощении структуры и конструкции ВИС.
Поставленная задача решается за счет того, что в систему для определения координат трассы подземного трубопровода, содержащую внутритрубный инспектирующий снаряд, включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный гироскопический измеритель угловой скорости и трехкомпонентный акселерометр, размещенные внутри контейнера, датчики сигналов маркеров с аналого-цифровым преобразователем, контроллером и датчик температуры, которые расположены внутри контейнера и соединены через первую системную шину с регистратором, подключенному к информационным входам блока вычислений и управления дополнительно введен блок формирования оценок параметров ориентации трубы, а на эластичные манжеты по внешней окружности установлены опорные колеса с отклонением направления оси их вращения от перпендикуляра к продольной оси гермоконтейнера на угол, обеспечивающий при движении ВИС по трубопроводу его вращение вокруг продольной оси с периодом по дистанции 300…700 м.
При этом регистратор выполнен в виде переносного долговременного запоминающего устройства, а блок вычислений и управления - в виде бортового процессора и наземной подсистемы в составе блоков ввода данных маркерных точек, вычисления сигналов коррекции по углам тангажа и крена, вычисления оценок параметров ориентации герметичного контейнера внутритрубного инспектирующего снаряда, идентификации смещения нулей инерциальных датчиков, а также устройства согласования, сумматора, вычислителя декартовых координат и дополнительно введенного блока формирования оценок параметров ориентации трубы, причем выходы переносного долговременного запоминающего устройства по каналам измерения угловых скоростей и линейных ускорений соединены через вторую системную шину с первой группой входов блока идентификации смещения нулей инерциальных датчиков и через сумматор с первыми группами входов блока вычисления оценок параметров ориентации контейнера и блока вычисления сигналов коррекции по углам тангажа и крена, два выхода которого соединены с соответствующими входами блока вычисления оценок параметров ориентации контейнера, третий вход которого соединен через вторую системную шину и устройство согласования с одним из выходов блока ввода данных маркерных точек, все выходы которого через устройство согласования и системную шину связаны со второй группой входов блока идентификации смещения нулей инерциальных датчиков, третья группа выходов переносного долговременного запоминающего устройства через вторую системную шину соединена с соответствующими входами блоков вычисления сигналов коррекции по углам тангажа и крена, идентификации смещения нулей инерциальных датчиков, а также вычислителя декартовых координат и блока вычисления оценок параметров ориентации контейнера, выходы которого соединены через блок формирования оценок параметров ориентации трубы с четвертой группой входов блока идентификации смещения нулей инерциальных датчиков и второй группой входов вычислителя декартовых координат, выходы которого соединены с пятой группой входов блока идентификации смещения нулей инерциальных датчиков, группа выходов которого соединена со второй группой входов сумматора, а два одиночных выхода соединены с соответствующими входами блоков вычисления оценок параметров ориентации контейнера и вычисления сигналов коррекции по углам тангажа и крена, выход переносного долговременного запоминающего устройства по каналу измерения температуры через вторую системную шину соединен с соответствующим входом блока идентификации смещения нулей инерциальных датчиков.
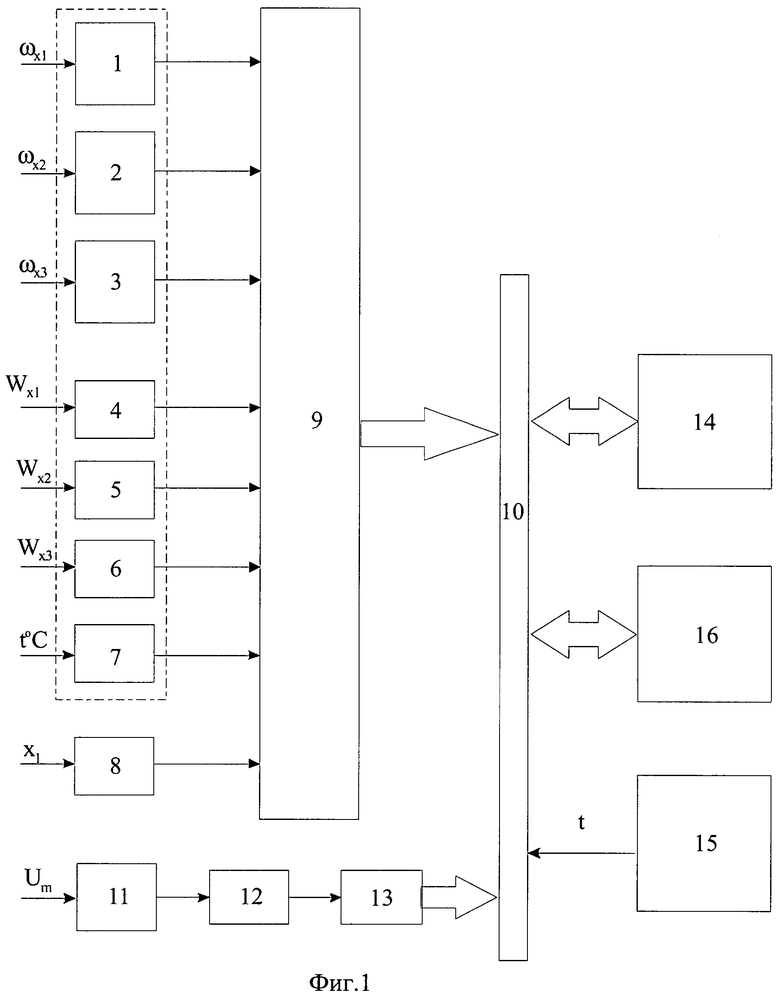
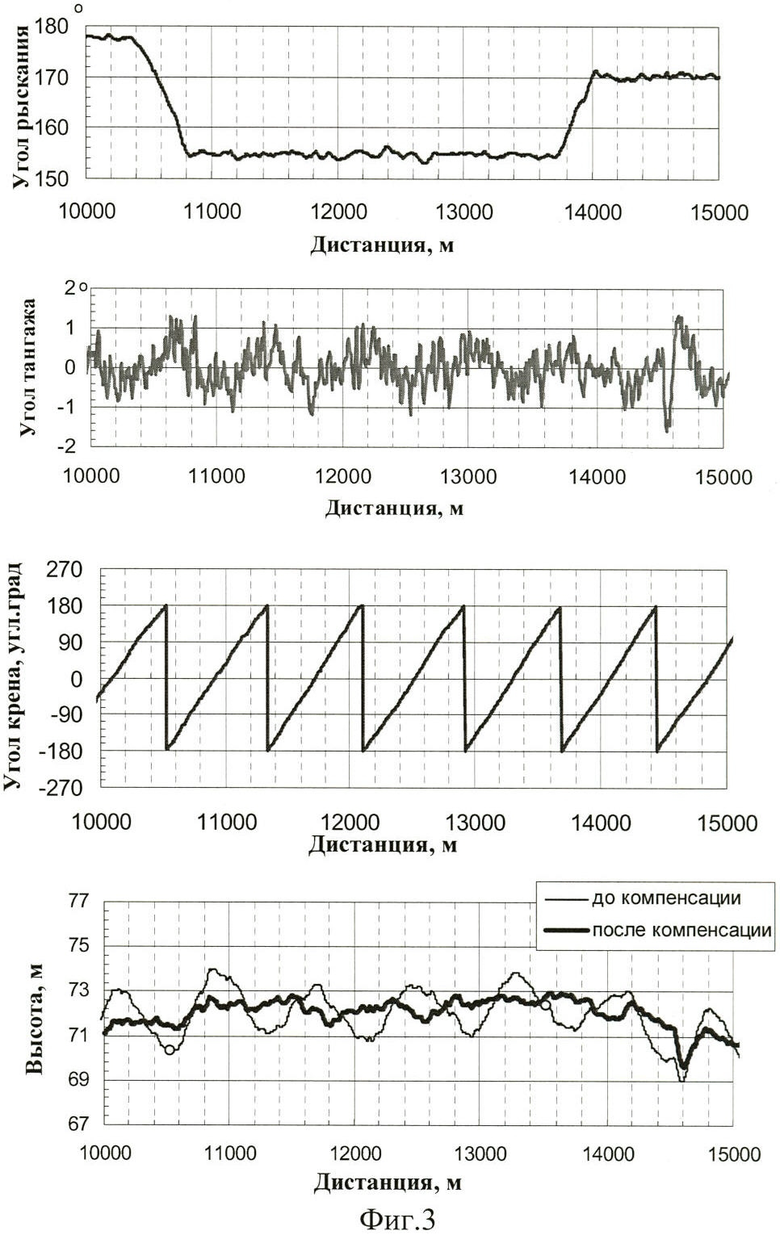
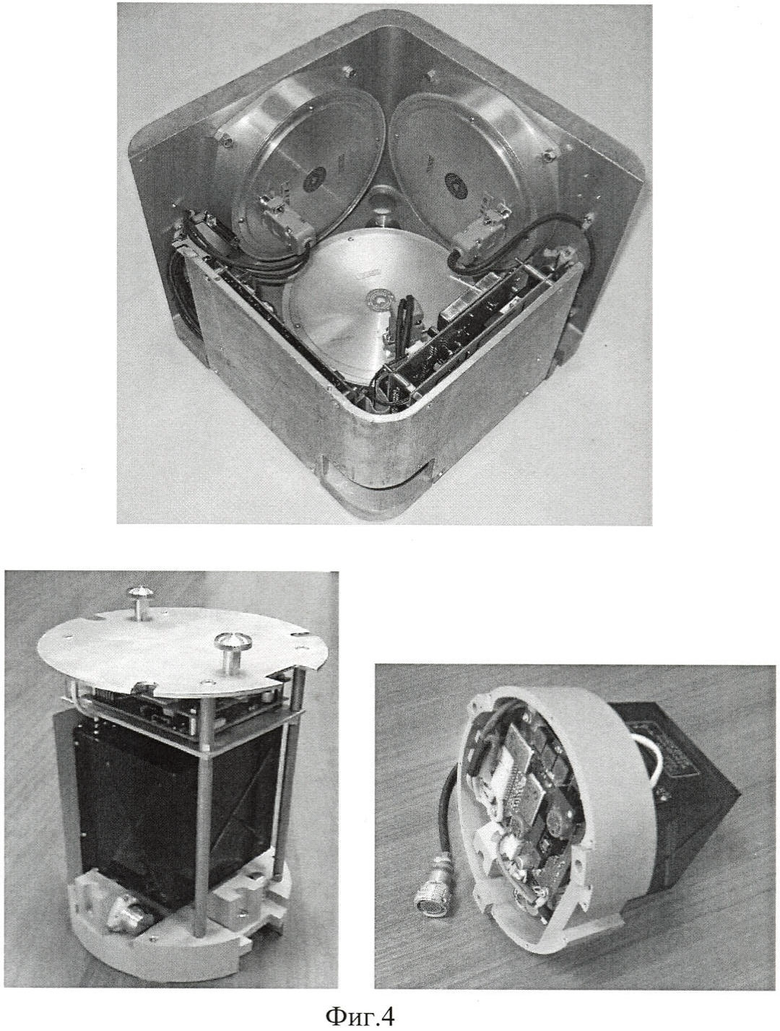
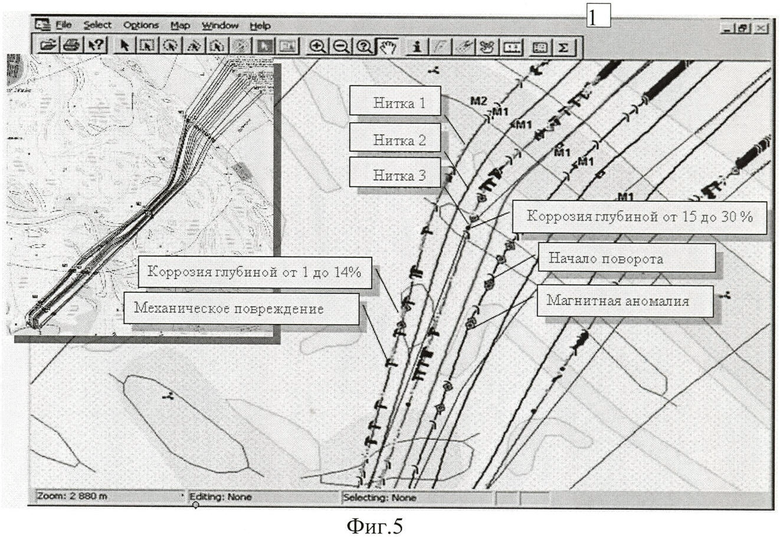
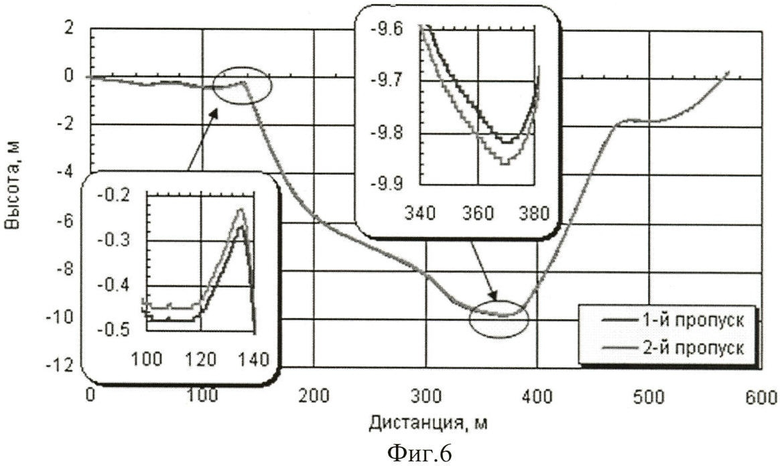
Предлагаемое изобретение поясняется чертежами, где на фиг.1 представлена функциональная схема бортовой подсистемы ВИС, на фиг.2 - функциональная схема наземной подсистемы для определения координат трассы трубопровода, на фиг.3 представлены графики изменения углов рыскания, тангажа и крена ВИС, определенные в результате обработки с помощью наземной подсистемы. Кроме этого, на фиг.3 представлены графики высотной координаты осевой линии трубопровода без использования блока формирования оценок параметров ориентации трубы (т.е. без компенсации углового смещения продольной оси ВИС относительно продольной оси трубы) и при его использовании. На фиг.4 представлены варианты исполнения блоков инерциальных датчиков бортовой подсистемы. На фиг.5 приведен пример отображения пространственного положения многониточных трасс МТ и их дефектов на электронной карте местности по данным пропуска внутритрубных инспектирующих снарядов ЗАО «Газприборавтоматикасервис». На фиг.6. приведен профиль подводного перехода по данным двух пропусков ВИС, подтверждающий хорошую воспроизводимость результатов позиционирования.
На фиг.1 и фиг.2 приняты следующие обозначения: 1, 2, 3 - гироскопические измерители угловых скоростей (ГИУС) ωx1, ωx2, ωx3 по осям ОХ1, ОХ2, ОХ3 ВИС; 4, 5, 6 - акселерометры, причем по оси OX1 акселерометр 4 измеряет ускорение Wx1, по оси ОХ2 - акселерометр 5, по оси ОХ3 - акселерометр 6; 7 - датчик температуры внутри контейнера, 8 - датчик пути. Выходы ГИУС 1, 2, 3, акселерометров 4, 5, 6, датчик температуры - 7, датчик пути 8 соединены с соответствующими входами первого аналого-цифрового преобразователя (АЦП) 9, выходы которого соединены с первой системной шиной 10. 11 - датчик сигналов маркера, содержащий усилитель, выходы которого соединены через второе АЦП 12 с входами контроллера маркеров 13. Выходы контроллера 13 связаны с соответствующими входами первой системной шины 10. С первой системной шиной 10 соединены также бортовой процессор 14, таймер 15 и долговременное запоминающее устройство (ДЗУ) 16. В качестве устройства 16 может использоваться флэш-память или другие запоминающие устройства.
Выход блока 17 ввода маркерных точек через устройство согласования 18 соединен со второй системной шиной 19. Первые две группы выходов ДЗУ 16 через вторую системную шину 19 соединены с блоком 24 идентификации смещения нулей инерциальных датчиков, а также через сумматор 20 с блоком 21 вычисления сигналов коррекции по углам тангажа и крена и блоком 22 вычисления оценок параметров ориентации. Два выхода блока 21 соединены с соответствующими входами блока 22, третий вход которого соединен через вторую системную шину 19 и устройство согласования 18 с одним из выходов блока 17 ввода данных маркерных точек. Третья группа выходов переносного долговременного запоминающего устройства 16 через вторую системную шину 19 соединены с соответствующими входами блоков вычисления сигналов коррекции по углам тангажа и крена - 21, вычислителя оценок параметров ориентации - 22, вычислителя декартовых координат - 23, идентификации смещения нулей инерциальных датчиков - 24. Остальные выходы блока 17 через устройство согласование и системную шину связаны с второй группой входов блока 24 идентификации смещения нулей инерциальных датчиков. Выходы вычислителя 22 соединены через блок 25 формирования оценок параметров ориентации трубы с четвертой группой входов блока 24 идентификации смещения нулей инерциальных датчиков и второй группой входов вычислителя 23 декартовых координат, выходы которого соединены с пятой группой входов блока 24 идентификации смещения нулей инерциальных датчиков. Два одиночных выхода блока 24 соединены с соответствующими входами блоков 21 и 22. Выход переносного ДЗУ 16 по каналу измерения температуры через вторую системную шину 19 соединен с соответствующим входом блока 24.
Новым по отношению к наиболее близкому аналогу является блок 25 формирования оценок параметров ориентации трубы, введенный в состав наземной подсистемы блока вычислений и управления для определения пространственных координат МГ, и установленные по внешней окружности эластичных манжет опорные колеса с отклонением направления оси их вращения от перпендикуляра к продольной оси гермоконтейнера на угол, обеспечивающий при движении ВИС по трубопроводу его вращение вокруг продольной оси с периодом по дистанции 300…700 м.
Работает система определения координат трассы подземного трубопровода следующим образом. После помещения ВИС в камеру запуска его выдерживают в неподвижном состоянии в течение 20 минут для обеспечения начальной выставки системы при обработке данных, а затем пропускают по инспектируемому участку, записывая под управлением бортового процессора 14 в ДЗУ 16 текущие значения системного времени и кажущихся ускорений, угловых скоростей, пройденного расстояния, температуры внутри блока инерциальных датчиков, а также сигналов маркеров. После извлечения снаряда из приемной камеры ДЗУ 16 отсоединяют от бортовой аппаратуры и присоединяют через системную шину 19 к наземной подсистеме, в которой производится начальная выставка системы определения координат трассы подземного трубопровода. Для этого в блок 17 ввода данных маркерных точек вводится информация по углам азимута  и координатам
и координатам 

 камеры запуска (m=0), а затем маркеров (m=1,.., - порядковый номер маркера), которые преобразуются АЦП 18 и подаются на системную шину 19.
камеры запуска (m=0), а затем маркеров (m=1,.., - порядковый номер маркера), которые преобразуются АЦП 18 и подаются на системную шину 19.
В блоке 24 на этапе начальной выставки (t∈[t0, Tв]) в камере запуска определяются оценки нулевых сигналов ГИУС 
 ,
,  ,
,  , (1)
, (1)
где t0, Tв - время начала и окончания выставки,  - сигналы ГИУС.
- сигналы ГИУС.
Затем в блоке 20 производится компенсация смещений нулей в сигналах ГИУС
 , (2)
, (2)
которые передаются в блок 21, а также в блок 22.
В блоке 21 сначала вырабатываются оценки  компонент ускорений, обусловленных вращением снаряда относительно его центра подвеса:
компонент ускорений, обусловленных вращением снаряда относительно его центра подвеса:
 ;
;
 ; (3)
; (3)

где  ,
,  ,
,  - координаты центра масс акселерометров 4, 5, 6 соответственно относительно центра подвеса снаряда, определяемые по измерениям на снаряде. Затем вычисляются
- координаты центра масс акселерометров 4, 5, 6 соответственно относительно центра подвеса снаряда, определяемые по измерениям на снаряде. Затем вычисляются  - оценки проекций ускорений сил тяжести по следующим алгоритмам:
- оценки проекций ускорений сил тяжести по следующим алгоритмам:
 (4)
(4)


где  - пройденный снарядом путь, счисляемый в БК 14 по сигналам датчика пути; tm - время прохождения снарядом маркера с номером m;
- пройденный снарядом путь, счисляемый в БК 14 по сигналам датчика пути; tm - время прохождения снарядом маркера с номером m;  - путевая скорость снаряда, Т - постоянная времени, выбираемая из условия эффективной фильтрации шумов датчиков при минимальном фазовом сдвиге,
- путевая скорость снаряда, Т - постоянная времени, выбираемая из условия эффективной фильтрации шумов датчиков при минимальном фазовом сдвиге,  - оценка нулевого сигнала продольного акселерометра (на этапе начальной выставки принимается равной нулю);
- оценка нулевого сигнала продольного акселерометра (на этапе начальной выставки принимается равной нулю);  ,
,  - зафиксированные в момент t=tm-1 прохождения снаряда мимо маркера значения оценок проекций ускорений сил тяжести и скорости движения снаряда:
- зафиксированные в момент t=tm-1 прохождения снаряда мимо маркера значения оценок проекций ускорений сил тяжести и скорости движения снаряда:
 ,
,  ;
;  . (5)
. (5)
Таким образом, сигналы коррекции по углам тангажа и крена вычисляются в соответствии с выражениями
 ;
;  (6)
(6)
и передаются в блок 22, где текущие значения оценок параметров ориентации вычисляются на основе корректируемых кинематических уравнений Эйлера:
 ;
;
 ; (7)
; (7)
 ;
;
t=0;  .
.
Здесь Kψ, Kθ, Kγ - коэффициенты позиционной коррекции, выбираемые, например, на основе теории модального управления с учетом интенсивности шумов ГИУС и сигналов коррекции θ* и γ*. При этом коэффициент Kψ обнуляется после начала движения снаряда.
В момент t=tm прохождения снаряда мимо маркера производится запоминание значений оценок параметров ориентации:

Сигналы, соответствующие текущим оценкам параметров ориентации  ,
,  ,
,  ВИС, поступают в блок 25 формирования оценок
ВИС, поступают в блок 25 формирования оценок  ,
,  параметров ориентации оси трубы, где осуществляется идентификация параметров углового смещения продольной оси ВИС относительно оси трубы и компенсации этого смещения в соответствующих оценках параметров ориентации:
параметров ориентации оси трубы, где осуществляется идентификация параметров углового смещения продольной оси ВИС относительно оси трубы и компенсации этого смещения в соответствующих оценках параметров ориентации:
 ;
;  , (9)
, (9)
где  - оценка угла между осями ВИС и трубы,
- оценка угла между осями ВИС и трубы,  - оценка фазы углового смещения в плоскости отсчета угла крена ВИС.
- оценка фазы углового смещения в плоскости отсчета угла крена ВИС.
Оценки параметров углового смещения  и
и  определяются методом наименьших квадратов по записям оценок , ,
определяются методом наименьших квадратов по записям оценок , ,  для всей трассы или ее отдельных участков при условии поворота ВИС вокруг продольной оси не менее чем на 10…30 оборотов (в зависимости от рельефности профиля трассы МГ). Поэтому на начальном этапе в качестве оценок параметров углового смещения и принимаются нулевые значения, компенсация углового смещения продольной ВИС относительно оси трубы не осуществляется и в блоке 25 только накапливаются записи оценок , , в виде соответствующих массивов
для всей трассы или ее отдельных участков при условии поворота ВИС вокруг продольной оси не менее чем на 10…30 оборотов (в зависимости от рельефности профиля трассы МГ). Поэтому на начальном этапе в качестве оценок параметров углового смещения и принимаются нулевые значения, компенсация углового смещения продольной ВИС относительно оси трубы не осуществляется и в блоке 25 только накапливаются записи оценок , , в виде соответствующих массивов  ,
,  ,
,  , где j=0,…,N - номер записи. А текущие оценки
, где j=0,…,N - номер записи. А текущие оценки  ,
,  , передаются в вычислитель 23, где формируется матрица направляющих косинусов
, передаются в вычислитель 23, где формируется матрица направляющих косинусов  , элементы которой используются в блоке 24 для пересчета приращения за один такт счета пройденного пути в горизонтную систему координат
, элементы которой используются в блоке 24 для пересчета приращения за один такт счета пройденного пути в горизонтную систему координат  :
:
где k - номер такта вычислений, начиная с момента прохождения снаряда мимо очередного маркера.
Затем здесь производится подсчет оценок декартовых координат снаряда:
 . (11)
. (11)
В момент t=tm прохождения снаряда мимо следующего маркера производится запоминание значений оценок декартовых координат снаряда:
 . (12)
. (12)
Далее оценки текущих значений декартовых координат, параметров ориентации снаряда и пройденного им пути поступают в блок 24 идентификации смещения нулей инерциальных датчиков. В момент t=tm прохождения снаряда мимо маркера эти значения фиксируются:  а из ДЗУ 16 считываются значения декартовых координат
а из ДЗУ 16 считываются значения декартовых координат  и азимута трубопровода
и азимута трубопровода  для данной маркерной точки.
для данной маркерной точки.
На основе этих данных производится вычисление невязок и вычисленных  координат данной маркерной точки
координат данной маркерной точки
 (13)
(13)
и в случае превышения ошибки позиционирования снаряда в месте установки данного маркера  запускается итерационный процесс пересчета декартовых координат
запускается итерационный процесс пересчета декартовых координат  на всем участке между двумя последними маркерами по следующему алгоритму:
на всем участке между двумя последними маркерами по следующему алгоритму:
а) производится вычисление приращений декартовых координат по отношению к моменту прохождения предыдущего маркера
 ; (14)
; (14)
б) аналогичные приращения декартовых координат формируются по данным маркеров

в) вычисляются интервал времени между моментами прохождения двух последних маркеров
 (16)
(16)
и пройденный за это время снарядом путь
 ; (17)
; (17)
г) вычисляются азимутальные углы между двумя последними маркерами на основе следующих выражений:
д) вычисляется нескомпенсированная систематическая составляющая азимутального дрейфа ГИУС и обусловленная нулевым сигналом и неточностью выставки продольного акселерометра систематическая ошибка определения угла тангажа
при наличии достаточно точной информации об азимутах трубопровода в местах установки маркеров нескомпенсированный азимутальный дрейф может быть вычислен следующим образом:
е) вносятся поправки в оценки азимутального дрейфа ГИУС и смещения нуля продольного акселерометра

 , (21)
, (21)
где n - номер итерации;
ж) системное время переводится назад t=tm-1, оценки смещений нулей инерциальных датчиков  , Iψ=Iψ[n] передаются в блоки 21 и 22, где в качестве начальных значений, определяемых в этих блоках оценок переменных, принимаются их значения, зафиксированные для момента времени t=tm-1;
, Iψ=Iψ[n] передаются в блоки 21 и 22, где в качестве начальных значений, определяемых в этих блоках оценок переменных, принимаются их значения, зафиксированные для момента времени t=tm-1;
з) в блоках 22, 25, 23 определяются уточненные значения параметров ориентации и декартовых координат;
и) в блоке 24 для момента времени t=tm вновь определяются невязки  и на основе их сравнения с допустимым уровнем ошибок позиционирования принимается решение о продолжении или остановке итерационного процесса пересчета декартовых координат
и на основе их сравнения с допустимым уровнем ошибок позиционирования принимается решение о продолжении или остановке итерационного процесса пересчета декартовых координат  на участке между двумя последними маркерами.
на участке между двумя последними маркерами.
После определения координат всей трассы МГ или ее части (один или несколько межмаркерных участков) при условии поворота ВИС вокруг продольной оси не менее чем на 10…30 оборотов в блоке 25 запускается процесс идентификации параметров углового смещения продольной оси ВИС относительно оси трубы.
Идея идентификации параметров углового смещения состоит в выделении в оценках угла тангажа ВИС
 (22)
(22)
гармонической составляющей в виде функции угла крена в следующем виде:
 , (23)
, (23)
где А и В - коэффициенты гармонической линеаризации, несущие информацию об амплитуде  и фазе углового смещения
и фазе углового смещения  , а С - нескомпенсированная систематическая ошибка определения угла тангажа, обусловленная нулевым сигналом и неточностью выставки продольного акселерометра.
, а С - нескомпенсированная систематическая ошибка определения угла тангажа, обусловленная нулевым сигналом и неточностью выставки продольного акселерометра.
Коэффициенты гармонической линеаризации А, В и С находятся на основе метода наименьших квадратов из условий:
 ,
,  ,
,  , (24)
, (24)
где 
Оценки параметров углового смещения продольной оси ВИС относительно оси трубы вычисляются по формулам:
После этого вновь запускается упомянутый выше итерационный процесс пересчета декартовых координат  . При этом в блоке 25 в соответствии с выражением (8) осуществляется компенсация в параметрах ориентации углового смещения продольной оси ВИС относительно продольной оси трубы, что приводит к компенсации соответствующих погрешностей пространственного позиционирования ВИС.
. При этом в блоке 25 в соответствии с выражением (8) осуществляется компенсация в параметрах ориентации углового смещения продольной оси ВИС относительно продольной оси трубы, что приводит к компенсации соответствующих погрешностей пространственного позиционирования ВИС.
Уточненные оценки декартовых координат  и параметров ориентации , , выводятся в качестве выходной информации системы.
и параметров ориентации , , выводятся в качестве выходной информации системы.
В блоке 24 идентификация смещения нулей инерциальных датчиков по сигналам датчика температуры 7 вырабатываются и вводятся температурные поправки в оценки сигналов инерциальных датчиков.
Система определения координат трассы подземного трубопровода реализована в ЗАО "Газприборавтоматикасервис" (г.Саратов).
В состав системы входят:
а) бортовая подсистема ВИС (для диаметров трубы от 325 до 1420 мм)
- инерциальный модуль на основе 3-х волоконно-оптических гироскопов ВГ-951 или 3-х компонентного волоконно-оптического гироскопа ТИУС-500 и блока 3-х акселерометров типа AT 1104 (см. фиг.4);
- датчик пути в виде блока одометров;
- датчики маркеров;
- модуль автономного питания;
- блок сопряжения и регистрации сигналов датчиков первичной информации;
б) наземная подсистема - стационарный компьютер типа Pentium с комплексом программ обработки и анализа записей сигналов датчиков первичной информации.
Система успешно апробирована при обследовании следующих трасс:
- МГ "Сахалин-Октябрьск-Хабаровск" (Ду 720 мм) протяженностью 400 км в ноябре 2009 г.;
- МГ "Барнаул-Бийск" на участке 0-150 км (Ду 720 мм) протяженностью 150 км в октябре 2008 г.;
- МГ "Белозерный ГПЗ-Нижневартовская ГРЭС" (резервная нитка) (Ду 720 мм) протяженностью 28 км в октябре 2007 г.;
и в настоящее время применяется при обследовании всех трасс внутритрубными средствами ЗАО «Газприборавтоматикасервис».
На фиг.3. приведены результаты оценки параметров ориентации ВИС и высотной координаты МГ для 5-километрового участка МГ "Сахалин-Октябрьск-Хабаровск". Из анализа приведенных графиков следует корреляция изменений как оценок угла тангажа ВИС, так и оценок высотных координат МГ с изменениями оценок угла крена. В блоке вычисления параметров ориентации трубы была произведена идентификация параметров углового смещения продольной оси ВИС относительно продольной оси трубы:  =0.019273 рад,
=0.019273 рад,  =0.14679 рад. В результате компенсации углового смещения в соответствующих оценках параметров ориентации погрешность оценок изменения высотной координаты МГ снижена на данном участке на 1…1.5 м.
=0.14679 рад. В результате компенсации углового смещения в соответствующих оценках параметров ориентации погрешность оценок изменения высотной координаты МГ снижена на данном участке на 1…1.5 м.
Отметим, что определенные таким образом параметры углового смещения могут сохранять свои значения (или использоваться в качестве начального приближения) и для ряда последующих пропусков ВИС при условии незначительного износа его манжет. Это позволяет повышать точность позиционирования трасс и дефектов МТ и для случаев недостаточно регулярного вращения ВИС вокруг продольной оси. Использование описанного технического решения позволило внутритрубными средствами ЗАО «Газприборавтоматикасервис» осуществлять пространственное позиционирование трасс и дефектов МТ с среднеквадратичной погрешностью не более 0.5 м (при расстояниях между маркерами не более 2 км), что существенно лучше всех аналогичных отечественных разработок. Кроме этого, появилась реальная возможность определения локальных смещений трубопроводов (при повторных обследованиях) с погрешностью порядка нескольких сантиметров (см. фиг.6). По результатам данных исследований определяются участки с напряженным состоянием трубы, что, как правило, является причиной развития стресс-коррозии, приводящей к серьезным авариям трубопроводных систем с большими материальными убытками и тяжелыми последствиями для экосистемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2439550C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
Система относится к устройствам контрольно-измерительной техники. Система для определения координат трассы трубопровода содержит: инспектирующий снаряд, эластичные манжеты, датчик пути, блок вычислений и управления, регистратор, трехкомпонентный гироскопический измеритель угловой скорости и трехкомпонентный акселерометр, датчик сигналов маркеров с аналого-цифровым преобразователем, контроллером и датчиком температуры, бортовой процессор, блок ввода маркерных точек блок идентификации смещения нулей инерциальных датчиков, сумматор, блок вычисления сигналов коррекции по углам тангажа и крена, блок вычисления декартовых координат, блок вычисления оценок параметров ориентации, блок формирования оценок параметров ориентации трубы. Техническим результатом изобретения является повышение точности определения координат трассы трубопровода за счет компенсации погрешностей, обусловленных угловым смещением продольной оси внутритрубного инспектирующего снаряда относительно продольной оси трубы. Это достигается с помощью внутритрубного инспектирующего снаряда и дополнительно введенного в состав наземной подсистемы блока формирования оценок параметров ориентации трубы, а также с помощью установленных по внешней окружности снаряда колес с отклонением направления оси их вращения от перпендикуляра к продольной оси для обеспечения вращения снаряда вокруг продольной оси гермоконтейнера при его движении. 6 ил.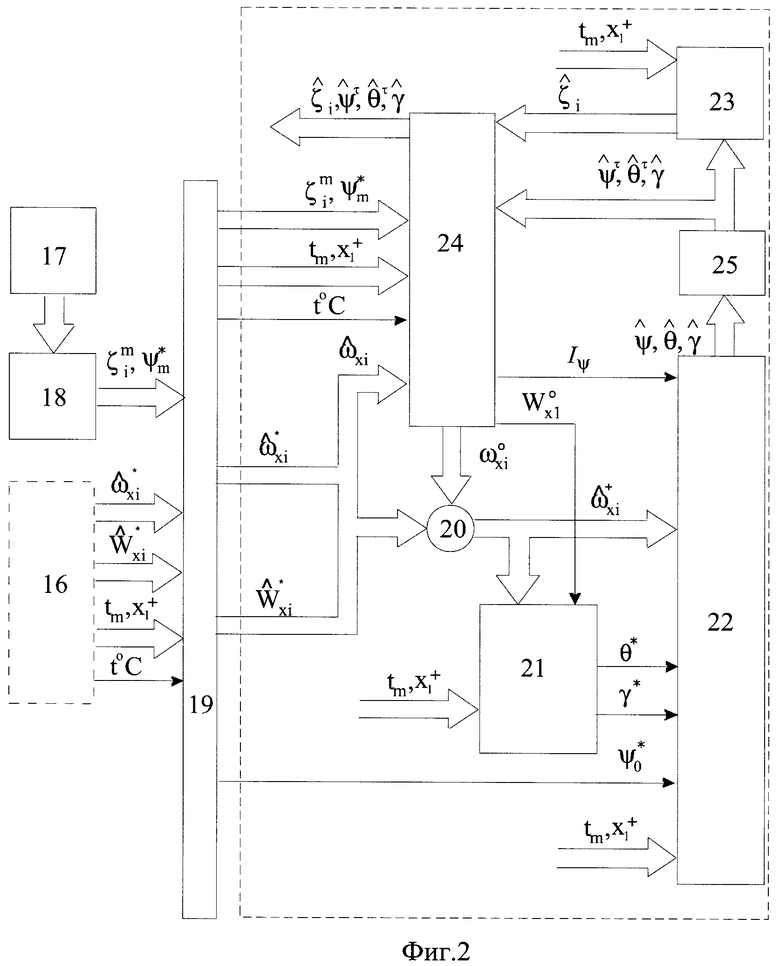
Система для определения координат трассы подземного трубопровода, содержащая внутритрубный инспектирующий снаряд, включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный гироскопический измеритель угловой скорости и трехкомпонентный акселерометр, размещенные внутри контейнера, датчик сигналов маркеров с аналого-цифровым преобразователем, контроллером и датчик температуры, которые расположены внутри контейнера и соединены через первую системную шину с регистратором, выполненным в виде долговременного запоминающего устройства и подключенным к информационным входам блока вычислений и управления в виде бортового процессора и наземной подсистемы в составе блоков ввода данных маркерных точек, вычисления сигналов коррекции по углам тангажа и крена, вычисления оценок параметров ориентации герметичного контейнера внутритрубного инспектирующего снаряда, идентификации смещения нулей инерциальных датчиков, а также устройства согласования, сумматора, вычислителя декартовых координат, выходы переносного долговременного запоминающего устройства по каналам измерения угловых скоростей и линейных ускорений соединены через вторую системную шину с первой группой входов блока идентификации смещения нулей инерциальных датчиков и через сумматор с первыми группами входов блока вычисления оценок параметров ориентации контейнера и блока вычисления сигналов коррекции по углам тангажа и крена, два выхода которого соединены с соответствующими входами блока вычисления оценок параметров ориентации контейнера, третий вход которого соединен через вторую системную шину и устройство согласования с одним из выходов блока ввода данных маркерных точек, все выходы которого через устройство согласования и системную шину связаны с второй группой входов блока идентификации смещения нулей инерциальных датчиков, третья группа выходов переносного долговременного запоминающего устройства через вторую системную шину соединены с соответствующими входами блоков вычисления сигналов коррекции по углам тангажа и крена, идентификации смещения нулей инерциальных датчиков, а также вычислителя декартовых координат и блока вычисления оценок параметров ориентации контейнера, выходы вычислителя декартовых координат соединены с пятой группой входов блока идентификации смещения нулей инерциальных датчиков, группа выходов которого соединена со второй группой входов сумматора, а два одиночных выхода соединены с соответствующими входами блоков вычисления оценок параметров ориентации контейнера и вычисления сигналов коррекции по углам тангажа и крена, выход переносного долговременного запоминающего устройства по каналу измерения температуры через вторую системную шину соединен с соответствующим входом блока идентификации смещения нулей инерциальных датчиков, отличающаяся тем, что в состав наземной подсистемы блока вычисления и управления дополнительно введен блок формирования оценок параметров ориентации трубы, входы которого соединены с выходами блока вычисления оценок параметров ориентации трубы, а выходы - с четвертой группой входов блока идентификации смещения нулей инерциальных датчиков и второй группой входов вычислителя декартовых координат, на эластичные манжеты по внешней окружности установлены опорные колеса с отклонением направления оси их вращения от перпендикуляра к продольной оси гермоконтейнера на угол, обеспечивающий при движении внутритрубного инспектирующего снаряда (ВИС) по трубопроводу его вращение вокруг продольной оси.
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| Гравитационный многоярусный стеллаж для хранения штучных грузов | 1981 |
|
SU1054235A2 |
| US 5565633 A, 15.10.1996 | |||
| WO 9932902 A2, 01.07.1999 | |||
| US 5770800 A, 23.06.1998. | |||

