Система относится к устройствам контрольно-измерительной техники. Она предназначена для определения географических координат точек продольной оси подземного газонефтепровода с помощью бесплатформенной инерциальной системы ориентации и навигации, а также датчика пути и других приборов, устанавливаемых на борту внутритрубного инспектирующего снаряда и на земле.
Уровень техники в данной области характеризуется приведенными ниже сведениями.
Известна "Инерциальная система контроля за трубопроводом" (Pat. USA 4945775, G 01 C 9/06, 1990), содержащая снаряд-носитель, имеющий несколько уретановых скребков для обеспечения движения снаряда, бесплатформенную инерциальную систему навигации, включающую триаду акселерометров и гироскопов, одометры, вычислитель, устройства и датчики неинерциальной природы для диагностики состояния трубопровода. Недостатком данной системы является сложность и необходимость применения бесплатформенной инерциальной системы и одометров высокой точности, что во многих случаях неприемлемо для реализации из-за чрезмерно высокой стоимости.
Имеется изобретение "Устройство для определения места дефекта трубопровода" (А. с. 1770750, G 01 D 5/00, 1992, БИ 39), которое содержит маркерные станции, установленные вдоль трубопровода, снаряд-дефектоскоп, причем маркерные станции содержат таймеры, а снаряд-дефектоскоп - высокостабильные таймеры и измерители пройденного пути, при этом устройство содержит блок синхронизации и хранения информации, синхровыход которого соединен со входом синхротаймера каждой маркерной станции, входом синхротаймера снаряда-дефектоскопа, а информационный вход блока синхронизации и хранения информации присоединен к информационному выходу маркерной станции.
Недостатком данного устройства является недостаточная точность определения географических координат трассы трубопровода по той причине, что они с нужной точностью определены только для мест установки маркерных станций. Места дефектов привязываются к ним только по времени и расстоянию вдоль трубы.
Наиболее близким аналогом предлагаемого изобретения является "Устройство для определения и регистрации геометрических параметров трубопроводов" (Патент РФ 2102704, G 01 В 17/02, 1998, БИ 2). Устройство содержит герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях герметичного контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, размещенные внутри герметичного контейнера, ультразвуковой измеритель радиальных расстояний, состоящий из n ультразвуковых приемопередающих преобразователей, расположенных попарно и диаметрально противоположно на внешней поверхности герметичного контейнера, и расположенного внутри контейнера измерительного модуля, первая группа выходов которого подключена к шине ввода, а первая группа входов - к управляющей шине блока вычислений, вторая группа выходов - к передатчикам, а вторая группа входов - к приемникам ультразвукового приемопередающего преобразователя, при этом оно снабжено трехкомпонентным гироскопическим измерителем угловой скорости и трехкомпонентным акселерометром, подключенными к информационным входам блока вычислений, и вторым и третьим ультразвуковыми измерителями радиального расстояния, аналогичного первому, первые группы их выходов подключены к шине ввода, а первая группа входов - к управляющей шине блока вычислений, при этом ультразвуковые приемопередающие преобразователи одного измерителя радиальных расстояний расположены по окружности в носовой части контейнера, другого измерителя - в средней части контейнера, третьего - в хвостовой части контейнера, а центр тяжести контейнера смещен к боковой поверхности.
Недостатком данного изобретения является наличие нарастающих во времени погрешностей определения координат трассы трубопровода, для уменьшения которых нужны гироскопы, акселерометры и одометры высокопрецизионного типа, но и эта мера не устраняет накопления погрешностей.
Задачей изобретения является обеспечение возможности исключения нарастания во времени погрешностей определения координат трассы трубопровода.
Поставленная задача решается за счет того, что в систему для определения координат трассы подземного трубопровода, содержащую внутритрубный инспектирующий снаряд, включающий герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный гироскопический измеритель угловой скорости и трехкомпонентный акселерометр, размещенные внутри контейнера, три ряда расположенных по окружностям ультразвуковых приемопередающих преобразователей, расположенных попарно и диаметрально противоположно на внешней поверхности по n в каждом ряду в носовой, хвостовой и средней частях контейнера, подключенные к информационным входам блока вычислений и управления введены акселерометр широкого диапазона измерения по продольной оси контейнера, три усилителя, соединенные своими входами с выходами трехкомпонентного измерителя угловой скорости, датчики сигналов маркеров с аналого-цифровым преобразователем, контроллером и датчик температуры, которые расположены внутри контейнера и соединены через первую системную шину с регистратором.
При этом регистратор выполнен в виде переносного долговременного запоминающего устройства, а блок вычислений и управления - в виде бортового процессора и наземной подсистемы в составе блоков ввода данных маркерных точек, переключения диапазонов гироскопических измерителей угловой скорости и переключения продольных акселерометров, вычисления сигналов коррекции по углам тангажа и крена, вычисления оценок параметров ориентации, идентификации смещения нулей, гироскопических измерителей угловой скорости и акселерометров, а также устройства согласования, сумматора, вычислителя декартовых координат, фильтра нижних частот, детектора уровня вибрации и устройства сравнения, причем выходы переносного долговременного запоминающего устройства по каналам измерения угловых скоростей и линейных ускорений соединены через вторую системную шину с блоком переключения диапазонов измерителей угловой скорости и акселерометров, первая группа выходов которого соединена с первой группой входов блока идентификации смещения нулей гироскопических измерителей угловой скорости и акселерометров и через сумматор с первыми группами входов блока вычисления оценок параметров ориентации и блока вычисления сигналов коррекции по углам тангажа и крена, вторая группа входов которого соединена с второй группой выходов блока переключения диапазонов гироскопических измерителей угловой скорости и акселерометров, а два выхода соединены с соответствующими входами блока вычисления оценок параметров ориентации, третий вход которого соединен через вторую системную шину и устройство согласования с одним из выходов блока ввода данных маркерных точек, остальные выходы которого через устройство согласования и системную шину связаны с второй группой входов блока идентификации смещения нулей гироскопических измерителей угловой скорости и акселерометров, третья группа выходов переносного долговременного запоминающего устройства через вторую системную шину соединены с соответствующими входами блоков вычисления сигналов коррекции по углам тангажа и крена, идентификации смещения нулей инерциальных датчиков, а также вычислителя декартовых координат, вычисления оценок параметров ориентации, выходы которого соединены с четвертой группой входов блока идентификации смещения нулей инерциальных датчиков и второй группой входов вычислителя декартовых координат, выходы которого соединены с пятой группой входов блока идентификации смещения нулей гироскопических измерителей угловой скорости и акселерометров, группа выходов которого соединена с второй группой входов сумматора, а два одиночных выхода соединены с соответствующими входами блоков вычисления оценок параметров ориентации и вычисления сигналов коррекции по углам тангажа и крена, выход переносного долговременного запоминающего устройства по каналу измерения температуры через вторую системную шину соединен с соответствующим входом блока идентификации смещения нулей инерциальных датчиков, кроме того, ультразвуковые приемопередающие преобразователи соединены через вторую системную шину, фильтр нижних частот и детектор уровня вибрации с входами устройства сравнения.
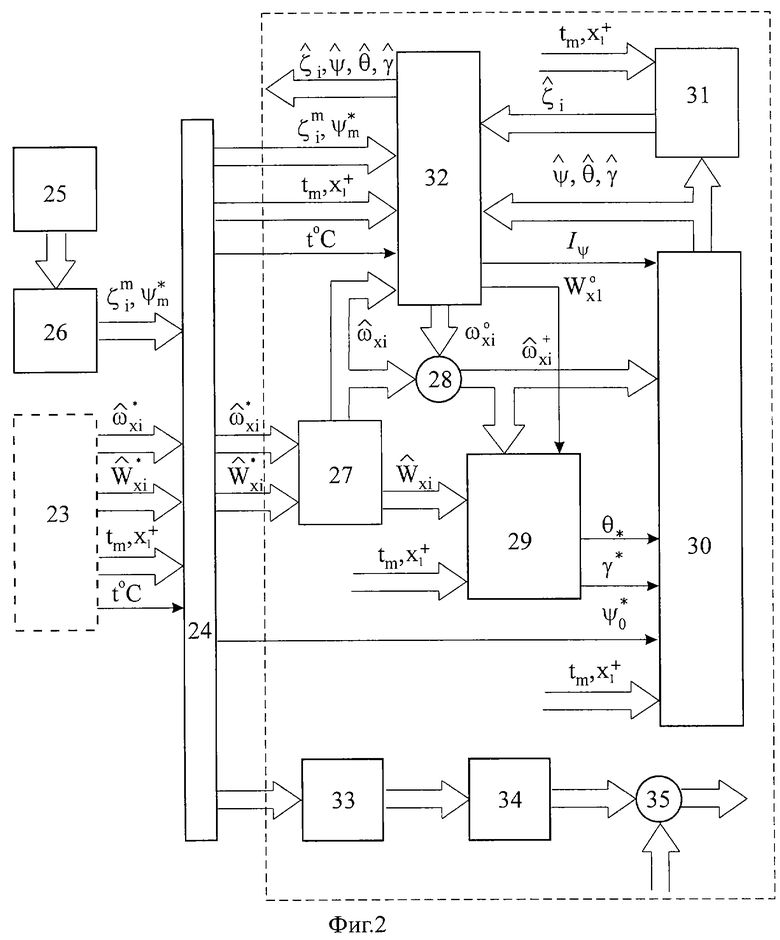
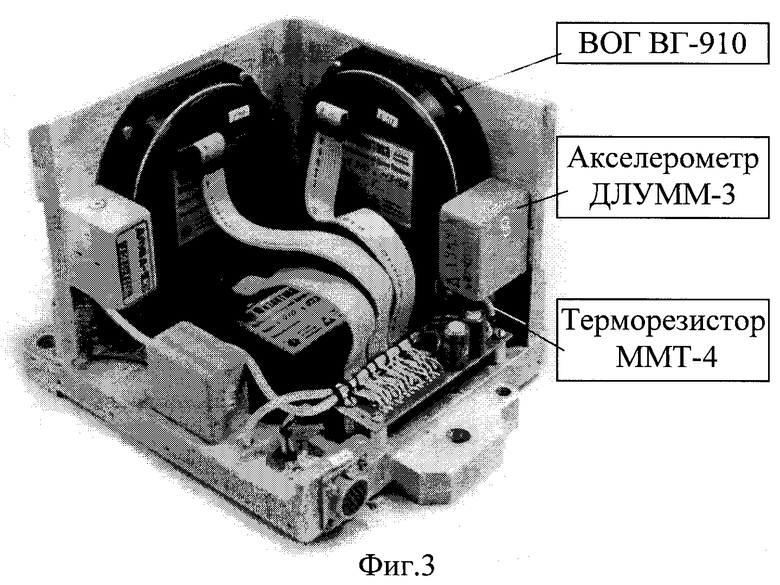
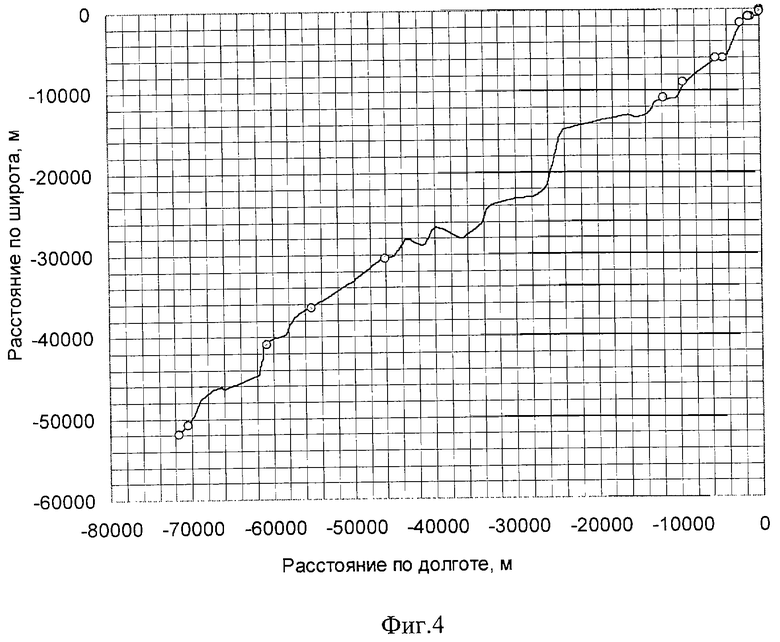
Предлагаемое изобретение поясняется чертежами, где на фиг.1 представлена функциональная схема бортовой подсистемы внутритрубного инспектирующего снаряда, на фиг.2 - функциональная схема наземной подсистемы для определения координат трассы трубопровода, на фиг. 3 - опытный образец инерциального модуля бортовой аппаратуры системы определения координат трассы трубопровода, на фиг.4 - представлен график траектории движения снаряда в плоскости горизонта, определенной в результате обработки с помощью наземной аппаратуры записей сигналов датчиков бортовой аппаратуры и данных маркеров.
Технический результат, который может быть получен при реализации данного изобретения - это создание системы определения координат трассы подземного трубопровода повышенной точности.
На фиг.1 и фиг.2 приняты следующие обозначения: 1, 2, 3 - гироскопические измерители угловых скоростей (ГИУС) ωx1, ωx2, ωx3 по осям ОХ1, ОХ2, OX3 внутритрубного инспектирующего снаряда; 4, 5, 6, 7 - акселерометры, причем по оси OX1 акселерометры 4 и 5 измеряют ускорение Wx1, по оси OX2 - акселерометр 6, по оси ОХ3 - акселерометр 7; 8, 9, 10 - усилители сигналов ГИУС 1, 2 и 3 соответственно; 11 - датчик температуры внутри контейнера, 12 - датчик пути. Выходы ГИУС 1, 2, 3, усилителей 8, 9, 10, акселерометров 4, 5, 6, 7, датчик пути 12 соединен с соответствующими входами первого аналого-цифрового преобразователя (АЦП) 13, выходы которого соединены с первой системной шиной 14. Выходы ультразвуковых приемопередающих преобразователей (УППП) с усилителями 15 соединены с входами второго АЦП 16, выходы которого присоединены к входам первого контроллера 17; устройства 15, 16 и 17 образуют трехрядный блок измерителей перемещений УППП снаряда относительно трубы, причем они расположены в носовой, средней и хвостовой частях корпуса снаряда, где xl s - боковое перемещение снаряда, причем s - номер ряда, l - номер датчика в ряду; 18 - датчик сигналов маркера, содержащий усилитель, выходы которого соединены через третье АЦП 19 с входами контроллера маркеров 20. Выходы контроллера 20 связаны с соответствующими входами первой системной шины 14. С первой системной шиной 14 соединены также бортовой процессор 21, таймер 22 и долговременное запоминающее устройство (ДЗУ) 23. В качестве устройства 23 может использоваться флэш-память или другие запоминающие устройства.
Выход блока 25 ввода маркерных точек через устройство согласования 26 соединен с второй системной шиной 24. Первые две группы выходов ДЗУ 23 через вторую системную шину 24 связаны с блоком 27 переключения диапазонов измерителей угловой скорости и выходов продольных акселерометров, первая группа выходов которого соединена через сумматор 28 с блоком 29 вычисления сигналов коррекции по углам тангажа и крена и блоком 30 вычисления оценок параметров ориентации. Два выхода блока 29 соединены с соответствующими входами блока 30, третий вход которого соединен через вторую системную шину 24 и устройство согласования 26 с одним из выходов блока 25 ввода данных маркерных точек. Третья группа выходов переносного долговременного запоминающего устройства 23 через вторую системную шину 24 соединены с соответствующими входами блоков вычисления сигналов коррекции по углам тангажа и крена - 29, вычислителя оценок параметров ориентации - 30, вычислителя декартовых координат -31, идентификации смещения нулей инерциальных датчиков - 32. Остальные выходы блока 25 через устройство согласования и системную шину связаны с второй группой входов блока 32 идентификации смещения нулей ГИУС и акселерометров. Выходы вычислителя 30 соединены с четвертой группой входов блока 32 идентификации смещения нулей инерциальных датчиков и второй группой входов вычислителя 31 декартовых координат, выходы которого соединены с пятой группой входов блока 32 идентификации смещения нулей ГИУС и акселерометров. Группа выходов блока 32 соединена с второй группой входов сумматора 28, а два одиночных выхода соединены с соответствующими входами блоков 29 и 30. Выход переносного ДЗУ 23 по каналу измерения температуры через вторую системную шину 24 соединен с соответствующим входом блока 32.
Выход ультразвукового приемопередающего преобразователя через вторую системную шину 24, фильтр нижних частот 33 и детектор 34 соединен с входом устройства сравнения 35.
Новыми по отношению к наиболее близкому аналогу являются: дополнительный акселерометр 4, прецизионные усилители сигналов ГИУС 8, 9, 10, датчик температуры 11 и датчик сигналов маркеров 18 с АЦП 19 и контроллером маркеров 20. Кроме того, регистратор выполнен в виде переносного ДЗУ 23, а блок вычислений и управлений - в виде бортового процессора 21 и наземной подсистемы.
Работает система определения координат трассы подземного трубопровода следующим образом. После помещения внутритрубного инспектирующего снаряда в камеру запуска его выдерживают в неподвижном состоянии в течение двух-трех минут для обеспечения начальной выставки системы при обработке данных, а затем пропускают по инспектируемому участку, записывая под управлением бортового процессора 21 в ДЗУ 23 текущие значения системного времени и кажущихся ускорений, угловых скоростей, пройденного расстояния, температуры внутри блока инерциальных датчиков, а также сигналов УППП и маркеров. После извлечения снаряда из приемной камеры ДЗУ 23 отсоединяют от бортовой аппаратуры и присоединяют через системную шину 24 к наземной подсистеме, в которой производится начальная выставка системы определения координат трассы подземного трубопровода. Для этого в блок 25 ввода данных маркерных точек вводится информация по углам азимута ψ
При работе системы блок 27 определяет по величинам  из каких каналов - грубого или точного отсчета - использовать в блоках 29 и 30 значения угловых скоростей. Если сигналы малы, то используются каналы
из каких каналов - грубого или точного отсчета - использовать в блоках 29 и 30 значения угловых скоростей. Если сигналы малы, то используются каналы  точного отсчета - с усилителей 8, 9, 10 и с акселерометров 5, 6, 7. Если велики - то с ГИУС 1, 2, 3 и акселерометра 4 для измерения ускорений от ударов от выступов в стенке трубы.
точного отсчета - с усилителей 8, 9, 10 и с акселерометров 5, 6, 7. Если велики - то с ГИУС 1, 2, 3 и акселерометра 4 для измерения ускорений от ударов от выступов в стенке трубы.
В блоке 32 на этапе начальной выставки (t∈[to,to+Tв]) в камере запуска определяются оценки нулевых сигналов ГИУС ω
где t0, TB - время начала и окончания выставки,  - сигналы ГИУС.
- сигналы ГИУС.
Затем в блоке 28 производится компенсация смещений нулей в сигналах ГИУС
которые передаются в блок 29, а также в блок 30.
В блоке 29 сначала вырабатываются оценки  компонент ускорений, обусловленных вращением снаряда относительно его центра подвеса:
компонент ускорений, обусловленных вращением снаряда относительно его центра подвеса: 
где rxi (1), rxi (2), rxi (3) - координаты центра масс акселерометров 5, 6, 7 соответственно относительно центра подвеса снаряда, определяемые по измерениям на снаряде. Затем вычисляются  - оценки проекций ускорений сил тяжести по следующим алгоритмам:
- оценки проекций ускорений сил тяжести по следующим алгоритмам:
где x1 + - пройденный снарядом путь, счисляемый в БК 21 по сигналам датчика пути; tm - время прохождения снарядом маркера с номером m;  - путевая скорость снаряда, Т - постоянная времени, выбираемая из условия эффективной фильтрации шумов датчиков при минимальном фазовом сдвиге, Wx1 0 - оценка нулевого сигнала продольного акселерометра (на этапе начальной выставки принимается равной нулю);
- путевая скорость снаряда, Т - постоянная времени, выбираемая из условия эффективной фильтрации шумов датчиков при минимальном фазовом сдвиге, Wx1 0 - оценка нулевого сигнала продольного акселерометра (на этапе начальной выставки принимается равной нулю);  - зафиксированные в момент t= tm-1 прохождения снаряда мимо маркера значения оценок проекций ускорений сил тяжести и скорости движения снаряда:
- зафиксированные в момент t= tm-1 прохождения снаряда мимо маркера значения оценок проекций ускорений сил тяжести и скорости движения снаряда:
Таким образом, сигналы коррекции по углам тангажа и крена вычисляются в соответствии с выражениями
и передаются в блок 30, где текущие значения оценок параметров ориентации вычисляются на основе корректируемых кинематических уравнений Эйлера:
Здесь KΨ, Kθ, Kγ и K
В момент t=tm прохождения снаряда мимо маркера производится запоминание значений оценок параметров ориентации и скоростей дрейфа:
Сигналы, соответствующие текущим оценкам параметров ориентации  поступают в вычислитель 31, где формируется матрица направляющих косинусов
поступают в вычислитель 31, где формируется матрица направляющих косинусов  , элементы которой используются в блоке 32 для пересчета приращения за один такт счета пройденного пути в горизонтную систему координат Oζ1ζ2ζ3/
, элементы которой используются в блоке 32 для пересчета приращения за один такт счета пройденного пути в горизонтную систему координат Oζ1ζ2ζ3/ 
где k - номер такта вычислений, начиная с момента прохождения снаряда мимо очередного маркера.
Затем здесь производится подсчет оценок декартовых координат снаряда:
В момент t=tm, прохождения снаряда мимо следующего маркера производится запоминание значений оценок декартовых координат снаряда:
Далее оценки текущих значений декартовых координат, параметров ориентации снаряда и пройденного им пути поступают в блок 32 идентификации смещения нулей ГИУС и акселерометра. В момент t=tm прохождения снаряда мимо маркера эти значения фиксируются:  а ДЗУ 23 считываются значения декартовых координат ζ
а ДЗУ 23 считываются значения декартовых координат ζ
На основе этих данных производится вычисление невязок ζ координат данной маркерной точки
координат данной маркерной точки
и в случае превышения ошибки позиционирования снаряда в месте установки данного маркера  запускается итерационный процесс пересчета декартовых координат
запускается итерационный процесс пересчета декартовых координат  на всем участке между двумя последними маркерами по следующему алгоритму:
на всем участке между двумя последними маркерами по следующему алгоритму:
а) производится вычисление приращений декартовых координат по отношению к моменту прохождения предыдущего маркера
б) аналогичные приращения декартовых координат формируются по данным маркеров
в) вычисляются интервал времени между моментами прохождения двух последних маркеров
Δt = tm-tm-1 (14)
и пройденный за это время снарядом путь
Δx
г) вычисляются азимутальные углы между двумя последними маркерами на основе следующих выражений
д) вычисляется нескомпенсированная систематическая составляющая азимутального дрейфа ГИУС и обусловленная нулевым сигналом и неточностью выставки продольного акселерометра систематическая ошибка определения угла тангажа
при наличии достаточно точной информации об азимутах трубопровода в местах установки маркеров нескомпенсированный азимутальный дрейф может быть вычислен следующим образом
е) вносятся поправки в оценки азимутального дрейфа ГИУС и смещения нуля продольного акселерометра
Iψ[n] = Iψ[n-1]-ω
где n - номер итерации.
ж) системное время переводится назад t=tm-1, оценки смещений нулей ГИУС и акселерометров Wx1 0=Wx1 0[n], Iψ = Iψ[n] передаются в блоки 29 и 30, где в качестве начальных значений, определяемых в этих блоках оценок переменных, принимаются их значения, зафиксированные для момента времени t=tm-1.
Уточненные оценки декартовых координат  параметров ориентации
параметров ориентации  выводятся в качестве выходной информации системы. Определяется уровень вибраций, для чего сигналы с усилителей УППП 14, прошедшие через АЦП 15, контроллер 16 и записанные в ДЗУ 23, пропускаются через фильтры нижних частот 33, где усиливаются постоянные составляющие их сигналов о постоянных составляющих расстояний от УППП до стенки трубы и выделяется переменная, сигналы проходят детекторы 34 и затем сравниваются в 35 с заданным уровнем и выводятся для анализа степени вибрации снаряда. По уровню вибрации и изменению зазоров судят о степени износа манжет и смещении центра тяжести снаряда в трубе.
выводятся в качестве выходной информации системы. Определяется уровень вибраций, для чего сигналы с усилителей УППП 14, прошедшие через АЦП 15, контроллер 16 и записанные в ДЗУ 23, пропускаются через фильтры нижних частот 33, где усиливаются постоянные составляющие их сигналов о постоянных составляющих расстояний от УППП до стенки трубы и выделяется переменная, сигналы проходят детекторы 34 и затем сравниваются в 35 с заданным уровнем и выводятся для анализа степени вибрации снаряда. По уровню вибрации и изменению зазоров судят о степени износа манжет и смещении центра тяжести снаряда в трубе.
В блоке 32 идентификация смещения нулей ГИУС и акселерометров по сигналам датчика температуры 11 вырабатываются и вводятся температурные поправки в оценки сигналов
Система определения координат трассы подземного трубопровода реализована в ИТЦ "Оргтаздефектоскопия" (г. Саратов) и на кафедре "Приборостроение" Саратовского государственного технического университета.
В состав системы входят:
а) внутритрубный инспектирующий снаряд "ДСУ-1200" с бортовым оборудованием следующего состава:
- инерциальный модуль на основе:
* 3 ГИУС типа ВГ-910 (воспроизводимость нулевого сигнала при переменной температуре - 15. ..30o/час, 1 СКО; стабильность нулевого сигнала при постоянной температуре - 5...15o/час, 1 СКО);
* акселерометры типа ДЛУММ-3;
* терморезистора ММТ-4;
- датчик пути в виде блока одометров;
- процессорная плата фирмы "Octagon systems" в стандарте Micro PC модель 5066-586;
- процессор AMD 5•586/133 МГц;
- ОЗУ 1 Мбайт;
- долговременное запоминающее устройство на основе:
* накопителя- Flash-диск серии SDP3 в стандарте PC Card (PCMCIA АТА) фирмы SanDisk, емкостью 220 Мбайт (данного объема достаточно для прогона продолжительностью 22 часа)
* контроллера накопителя - двухпортовая плата PCMCIA в стандарте Micro PC фирмы "Octagon systems" модель 5842;
- аналого-цировой преобразователь на основе платы фирмы "LAN Automatic" в стандарте micro PC модель AI8S-5-STB;
б) наземная подсистема - стационарный компьютер типа Pentium с комплексом программ обработки и анализа записей сигналов датчиков первичной информации.
Натурные испытания системы проводились на участке трассы магистрального газопровода "Екатериновка - Балашов" протяженностью 110 км в конце мая 2000 г. Внутритрубный инспектирующий снаряд был пропущен по этому участку дважды: сначала со средней скоростью около 3 м/с, а второй раз со средней скоростью более 4 м/с.
В силу использования относительно грубых ГИУС и акселерометра их дрейф может приводить к накоплению больших погрешностей в решении задачи навигации - определения траектории трубопровода. Для реализации итерационного процесса оценивания нескомпенсированных во время начальной выставки смещений нулей ГИУС и акселерометров и учета данных оценок при определении текущих декартовых координат трубопровода были использованы приемники GPS в составе временной маркерной станции. С их помощью были определены географические координаты 9-ти маркеров 20 км Екатериновского участка трассы и 8-ми маркеров Балашовского участка трассы.
На фиг.4. представлен график траектории движения снаряда в плоскости горизонта. Здесь кружками отмечены маркерные точки, определенные по сигналам GPS.
В ходе проведенных трассовых испытаний установлено:
- разработанный опытный образец системы позиционирования трассы подземного трубопровода на основе бесплатформенной системы ориентации и навигации внутритрубного снаряда позволяет построить траекторию осевой линии трубопровода в декартовой местной системе координат;
- по результатам испытаний на участке трассы Екатериновка-Балашов протяженностью в 110 км отклонения координат маркерных точек, определенных с помощью системы позиционирования трассы подземного трубопровода, от координат, определенных с помощью временных маркерных станций, не превышает 250-300 м (погрешности маркерных станций составляют 100...200 м). Позиционирование трассы без использования коррекции по маркерным точкам при данных точностях датчиков первичной информации практически неосуществимо.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2172488C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
Изобретение относится к устройствам контрольно-измерительной техники и предназначено для определения географических координат точек продольной оси подземного газонефтепровода. Система определения координат трассы подземного трубопровода содержит внутритрубный инспектирующий снаряд, который включает герметичный контейнер, эластичные манжеты, датчик пути, блок вычислений и управления, регистратор, трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный акселерометр, три ряда расположенных по окружностям ультразвуковых приемопередающих преобразователей, акселерометр широкого диапазона измерения по продольной оси контейнера, три усилителя, датчики сигналов маркеров с аналого-цифровым преобразователем и контроллером, датчик температуры. Ультразвуковые приемопередающие преобразователи расположены попарно и диаметрально противоположно на внешней поверхности по n в каждом ряду в носовой, хвостовой и средней частях контейнера. Усилители соединены своими входами с выходами трехкомпонентного измерителя угловой скорости. Акселерометр широкого диапазона измерения, три усилителя, датчики сигналов маркеров с аналого-цифровым преобразователем и контроллером, датчик температуры расположены внутри контейнера и соединены через первую системную шину с регистратором. Технический результат состоит в исключении нарастания со временем погрешностей определения координат трассы трубопровода. 1 з.п. ф-лы, 4 ил.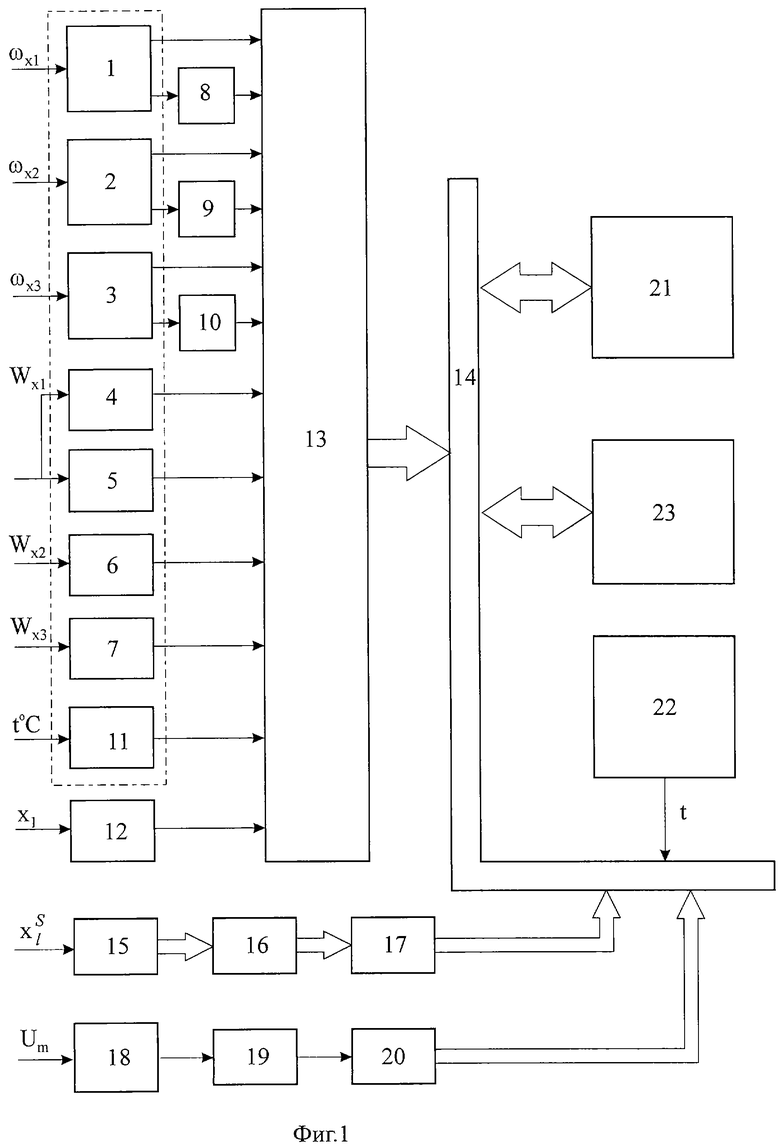
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РЕГИСТРАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДОВ | 1994 |
|
RU2102704C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ, ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И НАПРЯЖЕННОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 1996 |
|
RU2106569C1 |
| Устройство для контроля и регистрации нарушений гладкости внутренней поверхности труб и пространственно-геометрических параметров трубопроводов | 1989 |
|
SU1629683A1 |
| УНИВЕРСАЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ТРУБОПРОВОДА | 1993 |
|
RU2111453C1 |
| СПОСОБ РАЗРАБОТКИ МАЛЫХ КИМБЕРЛИТОВЫХ ТРУБОК | 2008 |
|
RU2426882C2 |
| DE 3626646 A, 18.02.1988. | |||

