о VI ю
00
ю
со
Изобретение относится к цифровой измерительной технике и может быть использовано в системах измерения и контроля параметров вращения.
Цель изобретения - расширение функциональных возможностей, повышение точности и быстродействия.
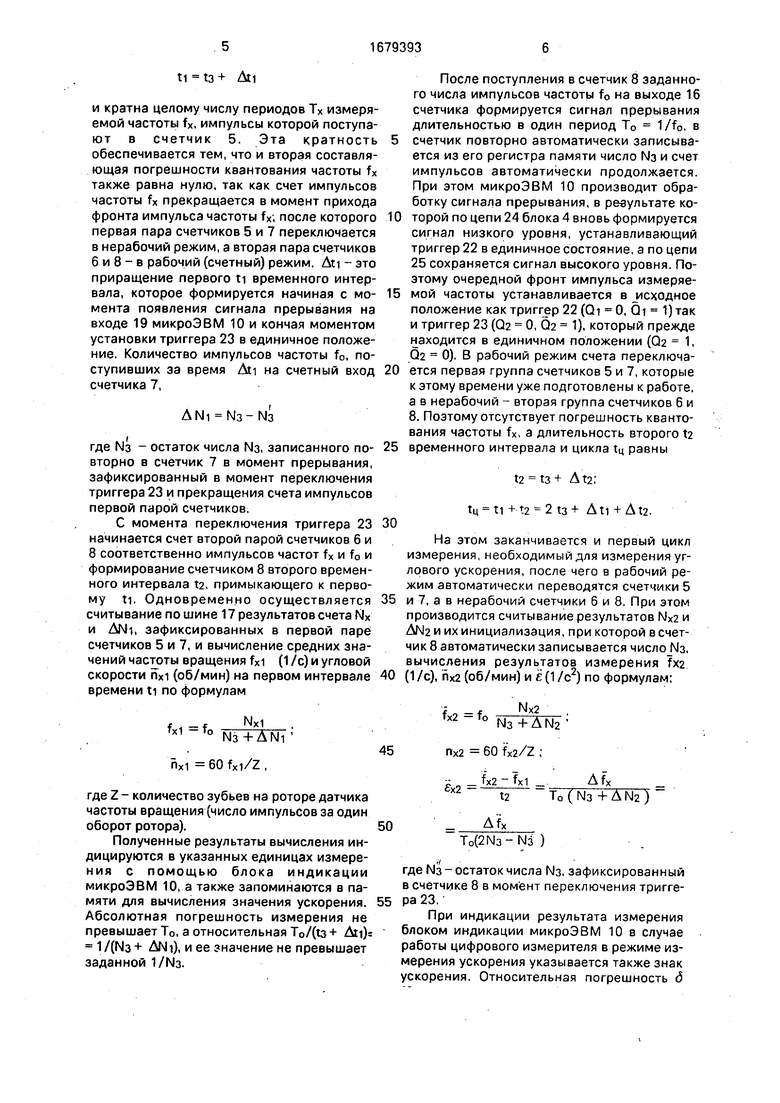
На фиг. 1 приведена структурная схема цифрового измерителя; на фиг. 2 - функциональная схема блока управления.
Цифровой измеритель угловой скорости и ускорения содержит частотный датчик 1 частоты вращения, входной формирователь 2 импульсов, генератор 3 образцовой частоты, блок 4 управления, первый 5, второй 6, третий 7 и четвертый 8 счетчики, элемент 2И 9 и микроЭВМ 10.
На структурной схеме (фиг. 1) обозначены первый вход 11, первый 12, второй 13 и третий 14 выходы блока 4 управления, выходы 15 и 16 счетчиков 7 и 8 соответственно, шина 17 управления и ввода данных микро- ЭВМ и ее первый 18 и второй 19 входы.
Блок 4 управления содержит элемент НЕ 20, резистор 21, первый 22 и второй 23 триггеры, цепи 24 и 25 второго входа блока. Цифровой измеритель углоэой скорости и ускорения работает следующим образом. После включения напряжений питания по цепи 24 и 25 блока 4 микроЭВМ 10 формирует сигналы низкого уровня, которые устанавливают триггеры 22 и 23 в единичное состояние (Qi 1, Q2 1). Поэтому на выходе 14 блока 4 образуется сигнал высокого уровня, который поступает на входы разрешения счета импульсов счетчиков 6 и 8, а на выходе 13 - сигнал низкого уровня, переводящий счетчики 5 и 7 в нерабочее состояние, в котором они могут быть подготовлены к работе (инициализированы) микроЭВМ 10с помощью шины 17 управления и данных. При инициализации счетчиков в счетчик 7 импульсов записывается число NS, определяемое погрешностью измерения дз 1 /№, задаваемой оператором с пульта управления микроЭВМ 10, и определяющее время измерения частоты вращения fx. Затем микроЭВМ 10 формирует по цепям 24 и 25 блока 4 управлений сигналы высокого уровня, вследствие чего с поступлением на вход 11 блока 4 первого фронта импульса частоты TX триггер 22 переключается в нулевое положение (Qi 0, Qi 1). Одновременно переключается в нулевое положение и второй триггер 23 (Qa 0, 62 1). Благодаря этому на входы разрешения первой пары счетчиков 5 и 7 поступает сигнал высокого уровня, переводящий их из нерабочего в рабочий (счетный) режим, и с этого момента осуществляется квантование частоты fx по методу
зависимого счета счетчиком 5, а счет импульсов образцовой частоты f0 - счетчиком 7. Так как обеспечивается синхронизация начала измерения с моментом появления фронта первого импульса частоты fx, то исключается первая составляющая погрешности квантования частоты, Одновременно на входах разрешения второй пары счетчиков
6и 8 присутствует сигнал низкого уровня, 0 снимаемый с выхода 14 блока 4, обеспечивающий нерабочий режим работы этих счетчиков, В процессе счета импульсов, при котором содержимое счетчика 5 уменьшается с Ммакс, определяемого его емкостью, в
5 результате суммирования импульсов частоты fx, а счетчика 7 уменьшается с N3 в результате суммирования импульсов частоты fo, микроЭВМ производит считывание чисел, зафиксированных в счетчиках 6 и 8 в
0 результате окончания процесса предыдущего измерения, а затем их инициализацию. Когда в счетчик 7 поступает число импульсов образцовой частоты, равное заданному NS, счетчик автоматически обнуля5 ется, на выходе 15 (обнуление счетчика) формируется сигнал низкого уровня длительностью в один период образцовой частоты, который поступает на вход 19 прерывания микроЭВМ 10. Одновременно
0 в счетчик 7 автоматически повторно записывается число N3, которое хранится в регистре памяти счегчика. На этом заканчивается формирование заданной длительности гз первого временного интервала:
5
ta NsTo,
в течение которого в счетчик 5 поступают
импульсы измеряемой частоты fx. После
0 окончания сигнала прерывания счетчики 5 и
7продолжают оставаться в рабочем режиме, счет импульсов частот fx и f0 продолжается, причем счетчик 7 начинает новый цикл уменьшения записанного во время обновле5 ния числа N3. МикроЭВМ 10 ведет обработку прерывания, в результате которой по цепи 24 блока 4 формируется сигнал низкого уровня, устанавливающий триггер 22 вноэь в единичное состояние (Qi 1, Qi 0),
0 так как по цепи 25 блока 4 сохраняется сигнал высокого уровня, то с поступлением фронта очередного импульса измеряемой частоты на вход 11 блока 4 первый триггер 22 устанавливается в нулевое положение
5 (Qi 0, Qi 1) и практически одновременно с ним устанавливается в единичное положение второй триггер 23 (Qa 1, &2 0). На этом заканчивается формирование первого временного интервала ti, продолжительность которого
ti t3 + Ati
и кратна целому числу периодов Тх измеряемой частоты fx, импульсы которой поступают в счетчик 5. Эта кратность обеспечивается тем, что и вторая составляющая погрешности квантования частоты fx также равна нулю, так как счет импульсов частоты fx прекращается в момент прихода фронта импульса частоты fx, после которого первая пара счетчиков 5 и 7 переключается в нерабочий режим, а вторая пара счетчиков б и 8 - в рабочий (счетный) режим. Ati - это приращение первого ti временного интервала, которое формируется начиная с момента появления сигнала прерывания на входе 19 микроЭВМ 10 и кончая моментом установки триггера 23 в единичное положение, Количество импульсов частоты f0, поступивших за время Ли на счетный вход счетчика 7,
ANi №-N3
где Ns - остаток числа N3, записанного повторно в счетчик 7 в момент прерывания, зафиксированный в момент переключения триггера 23 и прекращения счета импульсов первой парой счетчиков.
С момента переключения триггера 23 начинается счет второй парой счетчиков 6 и 8 соответственно импульсов частот fx и f0 и формирование счетчиком 8 второго временного интервала t2, примыкающего к первому ti. Одновременно осуществляется считывание по шине 17 результатов счета NX и ANi, зафиксированных в первой паре счетчиков 5 и 7, и вычисление средних значений частоты вращения fxi (1 /с) и угловой скорости iTxi (об/мин) на первом интервале времени ti no формулам
fx1 fo
NX1
10 Мз -KSNi
Пх1 60fx1/Z,
где Z - количество зубьев на роторе датчика частоты вращения (число импульсов за один оборот ротора).
Полученные результаты вычисления индицируются в указанных единицах измерения с помощью блока индикации микроЭВМ 10, а также запоминаются в памяти для вычисления значения ускорения. Абсолютная погрешность измерения не превышает То, а относительная T0/(t3+ Ati)1 1 /(N3 + AN 1), и ее значение не превышает заданной 1/№.
После поступления в счетчик 8 заданного числа импульсов частоты fo на выходе 16 счетчика формируется сигнал прерывания длительностью в один период Т0 1/fo, в
счетчик повторно автоматически записывается из его регистра памяти число N3 и счет импульсов автоматически продолжается. При этом микроЭВМ 10 производит обработку сигнала прерывания, в результате ко0 торой по цепи 24 блока 4 вновь формируется сигнал низкого уровня, устанавливающий триггер 22 в единичное состояние, а по цепи 25 сохраняется сигнал высокого уровня. Поэтому очередной фронт импульса измеряе5 мой частоты устанавливается в исходное положение как триггер 22 (Qi О, QI - 1) так и триггер 23 (Q2 О, Ch 1), который прежде находится в единичном положении (62 1, Q2 0). В рабочий режим счета переключа0 ется первая группа счетчиков 5 и 7, которые к этому времени уже подготовлены к работе, а в нерабочий - вторая группа счетчиков 6 и 8. Поэтому отсутствует погрешность квантования частоты fx, а длительность второго t2
5 временного интервала и цикла хц равны
t2 t3+ At2,30
ti( ti + t2 2 t3 + A t1 + A t2.
На этом заканчивается и первый цикл измерения, необходимый для измерения углового ускорения, после чего в рабочий режим автоматически переводятся счетчики 5
и 7, а в нерабочий счетчики 6 и 8. При этом производится считывание результатов NX2 и AN2 и их инициализация, при которой в счетчик 8 автоматически записывается число №, вычисления результатов измерения fX2
(1 /с), Пх2 (об/мин) и Ј (1 /с2) по формулам:
fx2 fo
Nx2
0 N3 + AN2 rtx2 60 fx2/Z ;
„ fx2-fx1 Јx2 -
Afx
tzTo ( N3 + A N2 )
Afx
T0(2N3-N3 )
где N3 - остаток числа №, зафиксированный в счетчике 8 в момент переключения тригге- ра23,
При индикации результата измерения блоком индикации микроЭВМ 10 в случае работы цифрового измерителя в режиме измерения ускорения указывается также знак ускорения. Относительная погрешность д
измерения частоты вращения f не превышает заданной дз - 1/Мз с пульта управления микроЭВМ 10 и может изменяться в широких пределах оператором или программным путем. Погрешность 5 обусловлена отсутствием синхронизации работы счетчика образцовой частоты f0 (ее значение определяется длительностью периода То 1 /fo) и нестабильностью частоты генератора 3.
При необходимости представления результатов измерения в других единицах, например 1/мин, рад/с, рад/мин, рад/с и других, указанных оператором в начале измерения путем задания их с пульта управления, при вычислениях микроЭВМ 10 производит дополнительное масштабирование цифровой информации.
В дальнейшем описанный процесс преобразования и цифровой обработки измерительной информации повторяется. Непрерывно и попеременно во времени работают обе пары счетчиков импульсов, из которых один счетчик (5 или 6) считает импульсы измеряемой частоты, а другой (7 или 8)- импульсы образцовой частоты, одновременно производится считывание результатов счета Nxi и NX2 и инициализация тех счетчиков, которые находятся в нерабочем режиме работы, вычисления результатов измерения по формулам
-- №
fo
° tixi 60 fxi/Z ;
Li- fo-M -O
xi (Ыз+ДМ|)То
и их индикация в заданных с пульта оператором-единицах измерения. При необходимости с пульта управления во время измерения могут изменяться в широких
пределах число зубьев Z, погрешность измерения дз, режимы измерения, единицы представления результатов и другие, что значительно расширяет функциональные возможности цифрового измерителя и позволяет изменять его технические характеристики при эксплуатации.
Формула изобретения Цифровой измеритель угловой скорости и ускорения, содержащий генератор образцовой частоты, блок управления, датчик частоты вращения, соединенный через формирователь импульсов с первым входом блока управления, первый и второй счетчики, соединенные первыми входами с первым выходом блока управления, второй и третий выходы которого соединены с вторыми входами соответственно первого и второго счетчиков, отличающийся тем, что, с целью расширения функциональных
возможностей, повышения точности и быстродействия, в него введены третий и четвертый счетчики, первые входы которых соединены с выходом генератора образцовой частоты, а вторые - соответственно с
вторым и третьим выходом блока управления, элемент 2И, входами соединенный с выходами соответственно третьего и четвертого счетчиков, микроЭВМ, связанная шиной управления и ввода данных с вторым
входом блока управления и третьими входами всех четырех счетчиков, при этом первый вход микроЭВМ соединен с выходом генератора образцовой частоты, а второй - с выходом элемента 2И.
п
22
-4к
-«
QZ
#
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2300112C2 |
| Устройство для измерения частоты и периода гармонического сигнала | 1991 |
|
SU1797714A3 |
| ИЗМЕРИТЕЛЬ ЧАСТОТЫ | 1989 |
|
RU2018173C1 |
| Контроллер измерительного преобразователя | 1988 |
|
SU1541632A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2402025C2 |
| Автоматическое устройство для измерения параметров радиотехнических элементов | 1988 |
|
SU1628015A1 |
| Измеритель переходных характеристик | 1989 |
|
SU1723563A1 |
| Цифровой измеритель отклонения измеряемой частоты от номинальной | 1979 |
|
SU1200188A1 |
| Контроллер измерительного преобразователя | 1987 |
|
SU1462357A1 |
| Цифровой измеритель отклонения измеряемой частоты от номинальной | 1976 |
|
SU748270A1 |
Изобретение относится к цифровой измерительной технике и может быть использовано в системах измерения и контроля параметров вращения. Целью изобретения является расширение функциональных возможностей за счет дополнительной обработки сигналов датчика частоты вращения и представления результатов измерения в требуемом виде, а также повышение точности и быстродействия за счет непрерывного измерения приращения частоты датчика на двух примыкающих один к другому отрезках времени. Сигнал датчика 1 частоты вращения через формирователь 2 импульсов поступает на вход блока 4, сигналы которого управляют работой двух, попеременно работающих групп счетчиков 5 и 7, 6 и 8. Счетчики 7 и 8 и микроЭВМ 10 тактируются генератором 3 образцовой частоты. По сигналам счетчиков 7 и 8 через элемент 9 осуществляется прерывание работы микро- ЭВМ 10, которое по шине 17 управления и данных осуществляет управление работой блока 4, считывание информации со счетчиков 5-8. При этом микроЭВМ обрабатывает эту информацию и представляет результаты измерения в требуемом виде. 2 ил. (Л С
27
+Ut
20
2
tn
фие.2
02
13
№
;z
25
| Цифровое устройство для измерения ускорения | 1975 |
|
SU571754A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения ускорения вращения | 1985 |
|
SU1310731A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
