Изобретение относится к управлению электрическими машинами и может быть использовано в дискретном электроприводе преимущественно с волновым шаговым двигателем.
Цель изобретения состоит в повышении точности отработки заданного перемещения.
На фиг.1 приведена функциональная схема предлагаемого устройства; на фиг.2 и 3 -диаграммы напряжений и токов, иллюстрирующие работу устройства.
Устройство (фиг.1) содержит распределитель 1 импульсов, усилитель 2 мощности и блок дробления шага, включающий реверсивный счетчик 3, RS-триггер 4 и две группы двухвходовых элементов И 5, выходы которых соединены через усилитель 2 мощности с соответствующими фазами двигателя 6, и
элемент ИЛИ 7, входы которого соединены с входами триггера 4 и с входами реверсивного счетчика 3, а выход соединен с установочным входом счетчика 8. Счетный вход счетчика 8 соединен через элемент И 9 с выходом генератора 10 импульсов. Выходы счетчика 8 соединены с первыми адресными входами постоянных запоминающих устройств (ПЗУ) 11 и 12. Причем выход старшего разряда счетчика 8 соединен с вторым входом элемента И 9. Другие адресные входы ПЗУ 11 и 12 соединены с выходами реверсивного счетчика 3 и с выходом RS-триггера 4, а выходы ПЗУ 11 и 12 соединены с входами соответствующих преобразователей -код-длительность 13 и 14, выходы которых соединены с вторыми входами соответствующих групп двухвходовых элементов И 5, первые входы которых соотО
3
ел о
СЛ
ветственно соединены с выходами распределителя 1 импульсов, входы которого сое- динены с выходами окончания счета реверсивного счетчика 3.
Устройство работает следующим образом.
Импульс управления fy (фиг.2) поступает на счетный вход В или Н реверсивного счетчика 3. В зависимости от направления движения двигателя происходит счет на увеличение или из уменьшение. Формируемый на выходах реверсивного счетчика 3 двоичный код поступает на соответствующие адресные входы ПЗУ 11 и 12. На выходах ПЗУ 11 и 12 формируется выходной код, соответствующий записанному входному, С выходов ПЗУ 11 и 12 коды поступают на входы соответствующих преобразователей 13 и 14 код-длительность, на выходах которых формируются импульсы напряжения, длительность которых пропорциональна вход-ному коду. Импульсы с выходов преобразователей код-длительность 13 и 14 через элементы И 5 поступают на усилитель 2 мощности, к выходам которого подключены фазы двигателя 6. Импульсы с выхода преобразователя код-длительность 13 поступают на нечетные фазы двигателя 6, а с преобразователя 14 - на четные фазы.
Закон изменения длительности импульсов напряжения определяется прошивкой ПЗУ 11 и 12 и может быть изменен в зависимости от типа двигателя. Длительность импульсов напряжения, приложенных к фазам шагового волнового двигателя 6, изменяется пропорционально
/0052(0, -Д) 1 ± COS 2 (ttj -ft
для нечетных фаз, и пропорционально
±Vsin2(cq-$ 1 ±sln2(o}-$
для четных фаз,
где О| - угловая координата оси фазы двигателя;
/3-угловая координата текущего устойчивого положений ротора;
j - номер фазы.
Такой закон изменения длительности импульсов напряжения обеспечивает равномерное изменение результирующего электромагнитного вектора. На выходах переноса ТСц или TCd окончания счета на увеличение или на уменьшение реверсивного счетчика 3 формируются импульсы, которые поступают на распределитель 1 импульсов, и являются командами на переключение фаз двигателя 6. При этом очередность включения фаз двигателя определяется состоянием выходов распределителя 1 импульсов. В случае использования в качестве реверсивного счетчика 3 счетчиков, у которых отсутствуют выходы переноса, команды на переключение фаз двигателя могут быть организованы с выходов старших разрядов. Таким образом, коды, формируе0 мые на выходах реверсивного счетчика 3, задают длительность импульсов питающего напряжения, а следовательно, величины токов, при которых обеспечивается устойчивое статическое положение гибкого ротора
5 в новом фиксированном положении. Токи в фазах шагового волнового двигателя 6 ступенчато изменяются по любому заданному закону.
Импульс управления fy поступает также
0 через элемент ИЛИ 7 на установочный вход R многоразрядного счетчика 8. Происходит его обнуление. При обнулении счетчика 8 разрешающий сигнал логической единицы с инверсного выхода его старшего разряда
5 поступает на второй вход элемента И 9. Тогда на счетный вход счетчика 8 через элемент И 9 непрерывно поступают импульсы заполнения фиксированной частоты с генератора 10 импульсов. Изменение кодов на выходе
0 счетчика 8 происходит до заполнения его старшего разряда. При изменении состояния на выходе старшего разряда запрещаю- щий сигнал логического нуля с его инверсного выхода поступает на второй
5 вход элемента И 9 и запирает его. Повторное изменение кодов на выходе счетчика 8 возможно лишь при поступлении следующего управляющего импульса fy. Следовательно, с приходом каждого управляющего
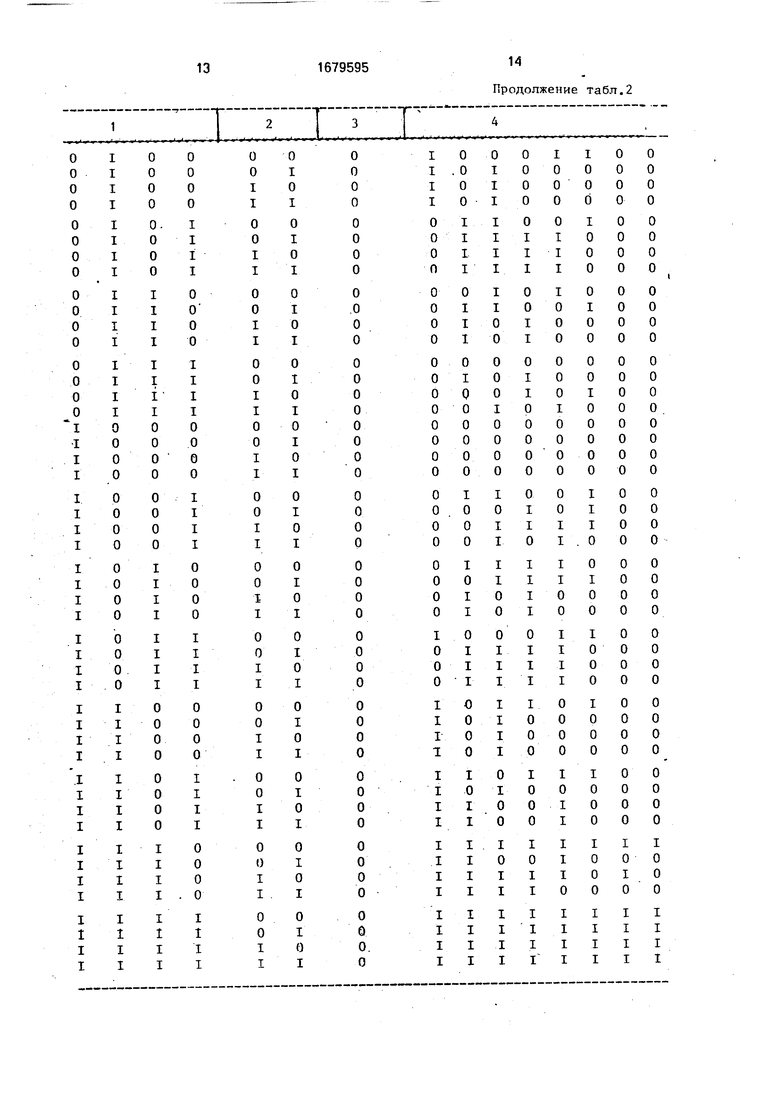
0 импульса fy на адресные входы ПЗУ 11 и 12 поступает постоянный код с выхода реверсивного счетчика 3 и переменный код с выхода счетчика 8 до запирания элемента И 9. На адресных входах ПЗУ 11 и 12 формиру5 ется входной код, который включает в себя коды, формируемые на выходах реверсивного счетчика 3 (в табл.1 приведен код для четырехразрядного реверсивного счетчика), коды, формируемые на выходах счетчика 8
0 (в табл.1 приведен код для двухразрядного счетчика) и сигнал, формируемый на выходе RS-триггера 4.
Сигнал, формируемый на выходе RS- триггера 4, является сигналом выбора на5 правления движения двигателя. Перевод RS-триггера 4 в соответствующее устойчивое состояние осуществляется при поступлении на его соответствующий вход очередного импульса управления fy. В табл.1 представлена программа соответствия выходного кода входному для ПЗУ 11. Программа прошивки ПЗУ 12 может быть получена путем сдвига программы прошивки ПЗУ 11. Например, для ПЗУ 12 входному коду (табл.1, п.1) соответствует хранимое в 5 ПЗУ восьмиразрядное слово (табл.1, п.9), входному коду (табл.1, п 2)-хранимое в ПЗУ восьмиразрядное слово (табл 1, п. 10 и т.д.). Программа прошивки ПЗУ 11 для работы в режиме движения назад приведена в 10 табл.2. Данный вариант реализации устройства управления с приведенной в табл.1 и 2 программой прошивки ПЗУ 11 и 12 обеспечивает коэффициент дробления основного шага, равный 16.15
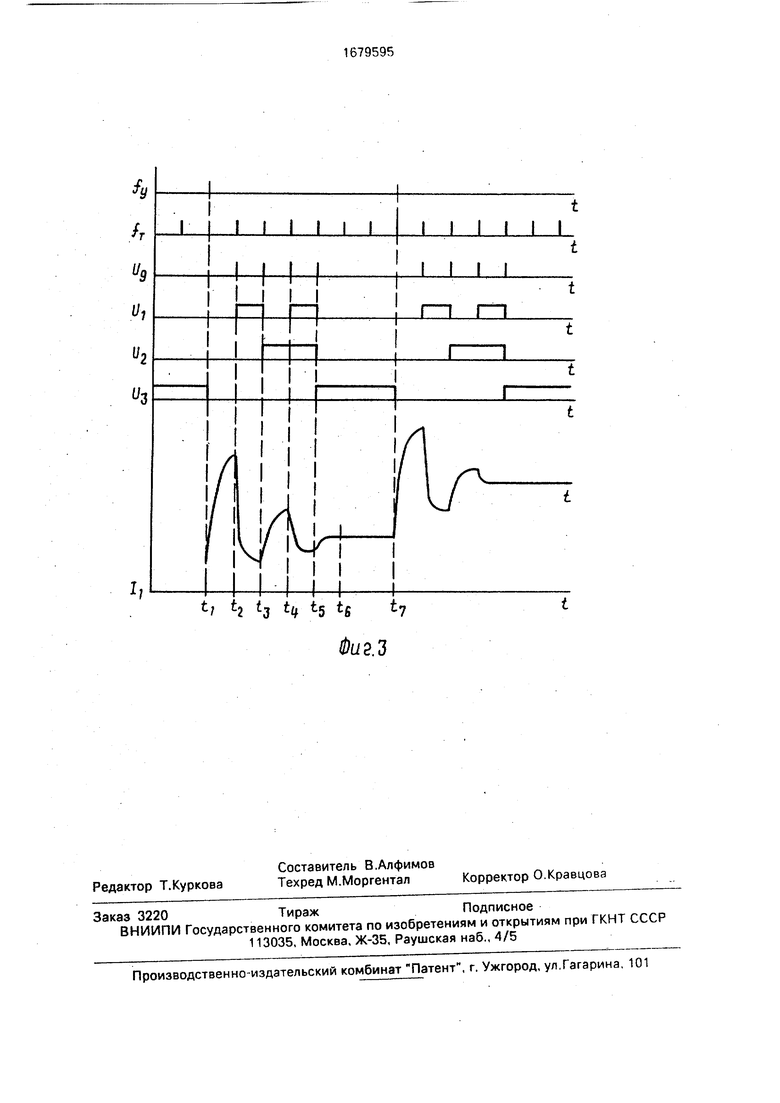
Коды, формируемые на выходах ПЗУ 11 и 12, поступают на входы соответствующих преобразователей код-длительность 13 и 14, на выходах которых формируются импульсы соответствующей длительности. Та- 20 ким образом, при каждом очередном изменении выходного кода счетчика 8 изменяется код на адресных входах ПЗУ 11 и 12 и, следовательно, изменяется код, формируемый на их выходах. Следовательно, при 25 каждом очередном изменении выходного кода счетчика 8 изменяются амплитуды токов, протекающих во включенных фазах шагового волнового двигателя 6. Коды, формируемые на выходах счетчика 8, зада- 30 ют изменение длительности импульсов питающего напряжения, а следовательно, и величин токов. Причем колебания величины тока затухают относительно значения, при котором обеспечивается устойчивое стати- 35 ческое положение гибкого ротора в новом фиксированном положении. Например, в момент времени ti (фиг.З) импульс управления fy поступает через элемент ИЛИ 7 на установочный вход R счетчика 8. Происхо- 40 дит его обнуление (на фиг.З приведены диаграммы напряжений. Ui - выход младшего разряда счетчика 8; Ua - выход второго разряда счетчика 8 и из - выход старшего разряда счетчика 8). При обнулении счетчика 8 45 разрешающий сигнал логической единицы с инверсного выхода его старшего разряда поступает на второй вход элемента И 9. Тогда на счетный вход счетчика 8 через элемент И 9 лоступают импульсы заполнения фикси- 50 рованной частоты с генератора 10 импульсов (ft на фиг.З). На счетный вход счетчика 8 поступают импульсы с выхода элемента И 9 (Ug на фиг.З). Счетчик 8 заполняется, и в моменты времени ta, хз, t4, ts происходит 55 изменение кода (Ui, Ua, из) на выходе счетчика 8. С приходом каждого импульса с выхода элемента.-) И 9 (Ug) происходит изменение кода, поступающего на адресные входы ПЗУ 11 и 12. При этом изменяется
длительность импульсов, формируемых на выходе преобразователей код-длительность 13 и 14, что влечет изменение величин токов, протекающих во включенных фазах двигателя 6. таким образом осуществляется переходный процесс изменения токов в фазах двигателя по затухающему колебательному закону (И - ток во включенной фазе двигателя, время на фиг.З).
Количество колебаний тока во включенной фазе двигателя определяется количеством разрядов счетчика 8 Длительность периода колебаний тока определяется частотой импульсов заполнения, поступающих на счетный вход счетчика 8 с выхода генератора 10 импульсов. Амплитуда затухающего колебательного переходного процесса изменения тока определяется программой прошивки ПЗУ 11 и 12. В момент времени ts происходит изменение состояния старшего разряда счетчика 8 (Уз). Тогда запрещающий сигнал логического нуля с инверсного выхода его старшего разряда (инверсия от Us) поступает на второй вход элемента И 9 и запирает его, Выходной код счетчика 8 (Ui. Ua, Us) не изменяется. Код, поступающий на адресные входы ПЗУ 11 и 12, также не изменяется Следовательно, ток. протекающий во включенных фазах шагового волнового двигателя 6, равен постоянному значению. Ротор двигателя 6 занимает при этом соответствующее угловое положение. В этом состоянии он находится до поступления следующего импульса управления fy (момент времени ty). С приходом следующего импульса управления fy на вход реверсивного счетчика 3 обнуляется счетчик 8 и работа устройства повторяется. Таким образом, в начале отработки двигателем 6 каждого элементарного (дробного) шага ток в фазах шагового волнового двигателя 6 имеет затухающий колебательный характер изменения амплитуды. Колебания амплитуд токов осуществляются относительно значений амплитуд, необходимых для фиксации ротора в новом устойчивом положении (диаграмма И, la на фиг.2).
Длительность, амплитуда и количество затухающих колебаний токов выбираются с учетом конкретного типа двигателя, так как длительность затухающих колебаний зависит от значения электромеханической постоянной двигателя. При этом для двигателей, имеющих более высокое значение электромеханической постоянной, длительность колебаний тока должна быть увеличена, Амплитуда затухающих колебаний тока зависит от момента инерции гибкого ротора, момента нагрузки, приложенного к валу двигателя, а также от текущего углового положения волны деформации. Количество затухающих колебаний тока зависит от диссипативных сил трения в зубчатой волновой паре. Таким образом, длительность, амплитуда и количество затухающих колебаний токов могут выбираться экспериментально для каждого типа двигателя и должны быть достаточны для обеспечения затухающего колебательного движения ротора относительно устойчивого положения. При этом колебания ротора устраняют влияние трения между витками магнито- провода, зубцами гибкого и жесткого колес, следовательно повышается точность отработки заданного перемещения при дроблении шага.
Характер и амплитуда токов, протекающих во включенных фазах двигателя 6 на каждом элементарном шаге перемещения, во время переходного процесса различны. Это обусловлено тем обстоятельством, что амплитуда синусоидально затухающих колебаний тока зависит от текущего углового положения волны деформации гибкого ротора. Поэтому при приближении большой оси деформации гибкого ротора к биссектрисе угла, образованного центральными осями любых смежных фаз, количество колебаний амплитуд тока, протекающего в данной фазе, уменьшается. Уменьшение амплитуды и длительности колебаний тока вызвано увеличением чувствительности гибкого ротора к изменению значений токов во включенных фазах. Программа прошивки ПЗУ 11 и 12 определяет и коэффициент дробления основного шага ротора. От заданного значения коэффициента дробления основного шага зависит емкость используемой матрицы ПЗУ 11 и 12 и количество разрядов реверсивного счетчика 3.
Таким образом достигается возможность обеспечить на выходе устройства управления любой заданный закон изменения тока в фазах двигателя. Кроме того, при отработке одного заданного дробного шага устройство управления в начале шага формирует импульс тока с периодически затухающей амплитудой, которая колеблется относительно такого значения тока, при котором обеспечивается устойчивое положение ротора в новом фиксированном положении, Затухающие синусоидальные колебания гибкого ротора относительно устойчивого положения устраняют влияние трения между витками магнитопровода, зубцами гибкого и жесткого колес, т.е. устраняется влияние трения на отработку дробного шага, что способствует повышению точности.
Формула изобретения Устройство для управления шаговым двигателем с дроблением°шага, содержащее распределитель импульсов, усилитель мощности и блок дробления шага, включающий реверсивный счетчик, RS-триггер и две группы двухвходовых элементов И, выходы которых соединены через усилитель мощиости с соответствующими фазами двигателя, отличающееся тем, что, с целью повышения точности отработки заданного перемещения, в блок дробления шага введены генератор импульсов, счетчик, два
преобразователя код-длительность, два постоянных запоминающих устройства, элемент И и элемент ИЛИ, входы которого соединены с входами RS-триггера и с входами реверсивного счетчика, выход - с установочным входом счетчика, счетный вход которого соединен через элемент И с выходом генератора импульсов, выходы счетчика соединены с первыми адресными входами постоянных запоминающих устройств, инверсный выход старшего разряда - с вторым входом элемента И, другие адресные входы постоянных запоминающих устройств соединены с выходами реверсивного счетчика и с выходом
RS-триггера, а выходы постоянных запоминающих устройств соединены с входами соответствующих преобразователей код-длительность, выходы которых подключены к вторым входам соответствующих
групп двухвходовых элементов И, первые входы которых соответственно соединены с выходами распределителя импульсов, входы которого соединены с выходами окончания счета реверсивного счетчика.
Таблица 1
1 Н



| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ M-ФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1991 |
|
RU2010294C1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1985 |
|
SU1267583A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1989 |
|
SU1679598A1 |
| Устройство для управления волновым шаговым двигателем | 1989 |
|
SU1700739A1 |
| Устройство для управления @ -фазным шаговым двигателем | 1988 |
|
SU1534741A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Устройство для программного управления четырехфазным шаговым двигателем с насыщенной магнитной системой | 1989 |
|
SU1702340A1 |
| Стенд для измерения угловых моментных характеристик шаговых электродвигателей | 1987 |
|
SU1636813A1 |
| Устройство для программного управления шаговым двигателем | 1988 |
|
SU1596308A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1494197A1 |

Изобретение относится к электротехнике и может быть использовано преимущественно в дискретных системах автоматического управления с волновыми шаговыми двигателями. Цель изобретения - повышение точности отработки заданного перемещения. Импульс управления поступает на счетный вход реверсивного счетчика 3. Двоичный код с его выходов поступает на адресные входы постоянных запоминающих устройств (ПЗУ) 11 и 12, на выходах которых формируется код, поступающий на входы преобразователей код-длительность 13 и 14. Импульсы напряжения переменной длительности с выходов преобразователей 13 и 14 через элементы 5 совпадения поступают на усилитель 2 мощности. Токи в фазах шагового волнового двигателя 6 имеют заданные затухающие колебания, что уменьшает влияние трения на точность позиционирования. 3 ил. fe
II4.
г,
ь
Ґ
Q
Ф«г2
2 h Ч tfi t7
0иг.З
| Устройство для управления @ -фазным шаговым двигателем | 1988 |
|
SU1534741A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1980 |
|
SU909784A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
