Известны регулируемые по скорости асинхронные электроприводы с тиристорным управлением, в которых для получения сигнала обратной связи применяют различного типа датчики частоты вращения, присоединяемые к валу двигателя. Однако использование таких датчиков в большинстве случаев является нежелательным из-за сложности их механического соединения с валом асинхронного электродвигателя.
Известны также регулируемые асинхронные электроприводы с вычислением скольжения двигателя по сигналам от датчиков тока и напряжения, включенных в цепи питания двигателя. Назначением этих устройств чаще всего является только индикация частоты вращения двигателя без обеспечения ее регулирования.
Наиболее близким к предлагаемому устройству является электропривод переменного тока, содержащий тиристорный преобразователь напряжения, включенный в статорные цепи асинхронного двигателя, блок управления, выходом подключенный к управляющему входу тиристорного преобразователя напряжения, а входом - к выходу блока регулятора частоты вращения, один вход которого подключен к выходу блока задания частоты вращения, а другой вход - к выходу измерителя частоты вращения, построенному на основе датчиков тока и напряжения двигателя, измерителя ЭДС статора и функционального преобразователя, реализующего зависимость расчетного значения частоты вращения от ЭДС и фазного напряжения двигателя (патент РФ №2251204, кл. Н02Р 5/28, прототип).
Недостатком этого устройства является необходимость измерения фазного напряжения на статоре двигателя, что часто затруднительно из-за отсутствия нулевой точки обмотки статора в клеммной коробке у ряда двигателей.
Задачей изобретения является определение расчетного значения частоты вращения ротора на основе измерения ЭДС и доступного для контроля линейного напряжения на статоре двигателя при обеспечении достаточной точности регулирования скорости асинхронного двигателя с тиристорным управлением.
Решение указанной задачи достигается тем, что электропривод переменного тока, содержащий асинхронный двигатель, тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, измеритель ЭДС статора с датчиками тока и напряжения двигателя, подключенными к входам измерителя ЭДС, функциональный блок, реализующий зависимость ω=f(Es, Us), где Es, Us - значения ЭДС и напряжения двигателя, блок управления, выход которого соединен с управляющим входом тиристорного преобразователя напряжения, блок регулятора частоты вращения и блок задания частоты вращения, своим выходом подключенный к первому входу блока регулятора частоты вращения, второй вход которого подключен к выходу функционального блока, а входы функционального блока подключены к выходу измерителя ЭДС и выходу датчика напряжения, причем измеритель ЭДС выполнен на основе нуль-органа и блока вычисления ЭДС, реализующего зависимость Es=f(Us, TБП), где ТБП - длительность бестоковой паузы, при этом вход нуль-органа подключен к выходу датчика тока, а выход нуль-органа - к первому входу блока вычисления ЭДС, второй вход которого подключен к выходу датчика напряжения, дополнительно снабжен вторым датчиком напряжения, выход которого подключен к дополнительному входу блока вычисления ЭДС, причем в качестве датчиков напряжения применены датчики линейного напряжения двигателя, а блок вычисления ЭДС выполнен с возможностью реализации зависимости:

где ТБП - длительность бестоковой паузы в фазе В;
uАВ1, uВС1 - значения линейных напряжений на статоре двигателя, полученные в начале бестоковой паузы в фазе В;
uABk, uВСk - значения линейных напряжений на статоре двигателя, полученные в конце бестоковой паузы в фазе В.
Зависимость, заложенная в блоке вычисления ЭДС, может быть упрощена, если выходы датчиков линейного напряжения соединить встречно-последовательно, реализовав таким образом операцию вычитания. Тогда в блоке вычисления ЭДС должна быть заложена следующая зависимость:

где us1 - сигнал на выходе соединенных встречно-последовательно датчиков напряжения, полученный в начале бестоковой паузы в фазе В;
uSK - сигнал на выходе соединенных встречно-последовательно датчиков напряжения, полученный в конце бестоковой паузы в фазе В.
На чертеже приведена структурная схема электропривода переменного тока.
Электропривод переменного тока содержит асинхронный двигатель 1, тиристорный преобразователь напряжения 2, снабженный выводами для подключения к сети, а выходом присоединенный к статорным обмоткам асинхронного двигателя.
Управляющий вход тиристорного преобразователя подключен к выходу блока управления 3, вход которого соединен с выходом блока регулятора частоты вращения 4. Один вход блока 4 регулятора частоты вращения связан с выходом задатчика 5 частоты вращения, а другой - с выходом функционального блока 11 измерителя частоты вращения. Измеритель частоты вращения, кроме блока 11, включает в себя блок 10 вычисления ЭДС, подключенный к выходам нуль-органа 9 и датчиков линейного напряжения 7 и 8 двигателя. Вход нуль-органа подключен к выходу датчика 6 тока двигателя. Функциональный блок 11 измерителя частоты вращения одним входом подключен к выходу блока 10 вычисления ЭДС, а другим - к выходу датчика 7 линейного напряжения.
Выход функционального блока 11 является выходом измерителя частоты вращения. В блоке 10 вычисления ЭДС реализована зависимость:
 где TБП - длительность бестоковой паузы в фазе В;
где TБП - длительность бестоковой паузы в фазе В;
uАВ1, uВС1 - значения линейных напряжений на статоре двигателя, полученные в начале бестоковой паузы в фазе В;
uABk, uBCk - значения линейных напряжений на статоре двигателя, полученные в конце бестоковой паузы в фазе В.
Зависимость, заложенная в блоке 10 вычисления ЭДС, может быть упрощена, если выходы датчиков 7 и 8 линейного напряжения соединить встречно-последовательно, реализовав таким образом операцию вычитания. Тогда в блоке вычисления ЭДС должна быть заложена следующая зависимость:

где us1 - сигнал на выходе соединенных встречно-последовательно датчиков напряжения, полученный в начале бестоковой паузы в фазе В;
usk - сигнал на выходе соединенных встречно-последовательно датчиков напряжения, полученный в конце бестоковой паузы в фазе В.
Электропривод работает следующим образом.
В исходном состоянии, когда сигнал задания частоты вращения остается неизменным, частота вращения двигателя соответствует заданной, а момент, развиваемый двигателем, равен моменту нагрузки, на выходах датчиков тока 6 и линейного напряжения 7 и 8 статора появляются сигналы, пропорциональные току и линейному напряжению статора двигателя, на выходе блока 10 вычисления ЭДС появляется сигнал, пропорциональный амплитуде ЭДС двигателя, а на выходе функционального блока 11 измерителя частоты вращения - сигнал, пропорциональный частоте вращения ротора асинхронного двигателя.
Регулятор частоты вращения 4, в котором определяется отклонение частоты вращения от заданного в блоке 5 значения, вырабатывает сигнал управления, зависящий от типа регулятора скорости и величины момента сопротивления на валу двигателя.
Блок управления 3 при этом обеспечивает на выходе тиристорного преобразователя 2 напряжение, достаточное для преодоления двигателем 1 нагрузки при заданной частоте вращения.
Изменение задания на частоту вращения приведет к изменению сигнала управления, в зависимости от которого блок управления 3 будет изменять углы открытия тиристоров, уменьшая или увеличивая напряжение на выходе преобразователя 2, в результате будет возрастать или уменьшаться ток, момент и частота вращения двигателя. Сигналы на выходах датчиков тока 6 и линейного напряжения 7 и 8 и блока 10 измерения ЭДС будут соответствовать значениям тока, линейного напряжения и ЭДС двигателя при новой частоте вращения, а сигнал на выходе блока 11 измерителя частоты вращения - величине этой частоты вращения, что вызовет соответствующее изменение сигнала на выходе блока 4 регулятора частоты вращения. Процесс регулирования будет продолжаться до тех пор, пока на выходе блока 4 регулятора частоты вращения не установится сигнал, обеспечивающий на выходе тиристорного преобразователя напряжение, достаточное для преодоления двигателем нагрузки при заданной частоте вращения.
При изменении момента нагрузки и колебаниях напряжения сети поддержание заданной частоты вращения осуществляется аналогичным образом.
Технический результат, достигаемый от использования в электроприводе переменного тока на основе асинхронного трехфазного электродвигателя с тиристорным управлением датчиков линейного напряжения с одновременной модификацией блока вычисления ЭДС, по сравнению с известным устройством заключается в возможности использования двигателей с недоступной нулевой точкой обмотки статора при обеспечении достаточной точности регулирования скорости асинхронного электродвигателя, что расширяет область использования устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369002C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2576330C1 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Устройство для управления вентильным непосредственным преобразователем частоты | 1981 |
|
SU1078579A1 |
| Способ управления электроприводом "Каскад ФАЗО | 1986 |
|
SU1494189A1 |
| Асинхронный электропривод с экстремальным управлением | 1984 |
|
SU1251273A1 |
| Электропривод переменного тока | 1989 |
|
SU1753574A1 |
| Способ измерения скорости вращения электродвигателя | 1985 |
|
SU1290174A1 |
Изобретение относится к области электротехники и может быть использовано для плавного пуска и регулирования скорости асинхронных тиристорных электроприводов общепромышленного применения, а именно в приводах вентиляторов, компрессоров, насосов, шлифовальных машин, транспортеров, механизмов горизонтального перемещения подъемно-транспортных машин и др. Техническим результатом является упрощение реализации системы автоматического регулирования скорости двигателя в асинхронных электроприводах с тиристорным управлением без датчика частоты вращения на валу при сохранении точности регулирования. Электропривод переменного тока включает в себя асинхронный двигатель, тиристорный преобразователь напряжения, блок управления, блок регулятора частоты вращения, блок задания частоты вращения и измеритель частоты вращения двигателя, выполненный на основе измерителя ЭДС статора с датчиками тока и линейного напряжения двигателя. 1 ил.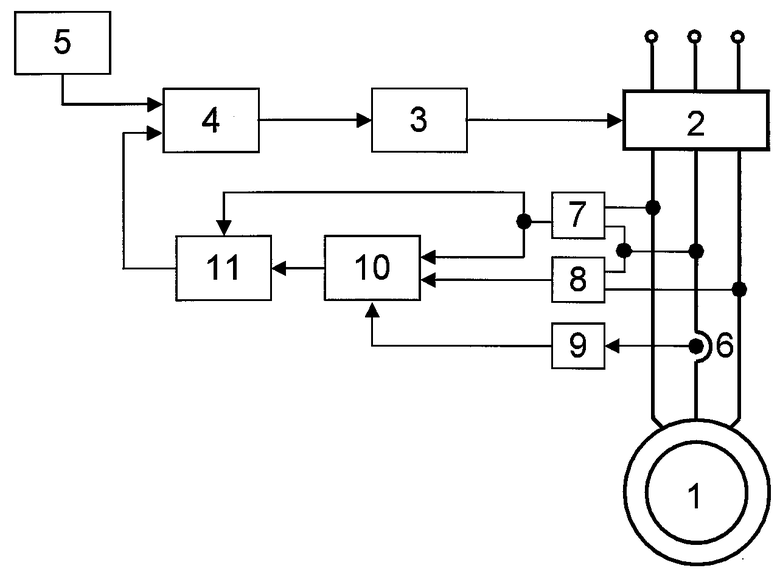
Электропривод переменного тока, содержащий асинхронный двигатель, тиристорный преобразователь напряжения, включенный между статорной обмоткой двигателя и питающей сетью, измеритель ЭДС статора с датчиками тока и напряжения двигателя, выходы которых подключены к входам измерителя ЭДС статора, функциональный блок, реализующий зависимость ω=f(Es, Us), где Es, Us - значения ЭДС и напряжения двигателя, блок управления, выход которого соединен с управляющим входом тиристорного преобразователя напряжения, блок регулятора частоты вращения и блок задания частоты вращения, своим выходом подключенный к первому входу блока регулятора частоты вращения, второй вход которого подключен к выходу функционального блока, а входы функционального блока подключены к выходу измерителя ЭДС и выходу датчика напряжения, причем измеритель ЭДС выполнен на основе нуль-органа и блока вычисления ЭДС, реализующего зависимость Es=f(Us, ТБП), где ТБП - длительность бестоковой паузы, при этом вход нуль-органа подключен к выходу датчика тока, а выход нуль-органа - к первому входу блока вычисления ЭДС, второй вход которого подключен к выходу датчика напряжения, отличающийся тем, что в качестве датчика напряжения применены линейные датчики напряжения двигателя, а блок вычисления ЭДС выполнен с возможностью реализации зависимости

где TБП - длительность бестоковой паузы в фазе В;
uAB1, uвC1 - значения линейных напряжений на статоре двигателя,
полученные в начале бестоковой паузы в фазе В;
uABk, uBCk - значения линейных напряжений на статоре двигателя, полученные в конце бестоковой паузы в фазе В.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| ТРЕХФАЗНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2002 |
|
RU2231203C2 |
| Электропривод переменного тока | 1990 |
|
SU1758821A1 |
| СОСТАВ ДЛЯ МАТИРОВАНИЯ СТЕКЛОИЗДЕЛИЙ | 2000 |
|
RU2189952C2 |
| US 5859514 A, 12.01.1999 | |||
| JP 3173374 A, 26.07.1991 | |||
| Способ иммобилизации кислых протеиназ | 1976 |
|
SU621680A1 |
| Способ получения циклических ацеталей | 1951 |
|
SU101559A1 |

