теграпьных аналого-цифровых преобра-токоэ и скорости вращения поаключены
зователей блоков определения фазных
1026272
к выходу блока синхррнизации.


| название | год | авторы | номер документа |
|---|---|---|---|
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Электропривод переменного тока | 1987 |
|
SU1534735A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА, содержащий асинхронный двигатель с короткоэамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты с непосредственной связью, задатчик скорости вращения, выход которого подключен к nej кому входу формирователя задания фазных токов статора и потокосцепления ротора, выходы которого через блок фазных регуляторов подключены к входам управления преобразователя частоты с непосредственной связью, блок определения фазных токов с фазными измерителями токов, связанный с блоком вычисления потокосцепления ротора, трехфазный выход которого подключен к соответству- няцим входам обратной связи блока фазных регуляторов, блок синхронизации, блок определения скорости вращения с датчиком скорости, выход которого подсоединен к второму входу формирователя задания фазных токов статора и потркосиепления ротора, отличающий - с я тем, что, с целью повышения качества в динамических режимах работы, . снабжен дискретным блоком расчетных коэффициентов и дискретным блоком оперативной памяти, входы которого соединены с выходами блока фазных регуляторов, блока определения фазных токов и блока определения скорости вращения, первый и второй трехфазные выходы дискретного блока оперативной памяти соединены соответственно с первым и вторым трехфазными входами блока вычисления потокосиепления ротора, третий и четвертый трехфазные выходы и пятый выход дискретного блока оперативной памяти - с соответствующими входа- ;ми дискретного блока расчетных коэф.фициентов, первый и второй выходы кото(Л рого соединены с соответствующими вхо дам и управления блока фазных регулятос: ров иблока вычисления погокосцепления poTOpia, при этом второй трехфазный выход дискретного блока оперативной памяти подключен к соответствующему входу обратной связи блока фазньк регуляторов, а блок фазных регуляторов и блок ю вычисления потокосцепления ротора выО5 полнены в виде многосвязных дискретных ю преобразователей, блок определения ных токов снабжен фазными интегральtc ными аналого-цифровыми преобразователями, вход каждого из которых подключен к выходу соответствующего фазного измерителя тока, а выход образует соответствующий фазный выход блока определения фазных токов, блок определения скорости вращения снабжен интегральным аналого-цифровым преобразователем, вход которого подключен к выходу датчика скорости, а выход образует выход блока определения скорости вращения, причем входы синхронизации ин-
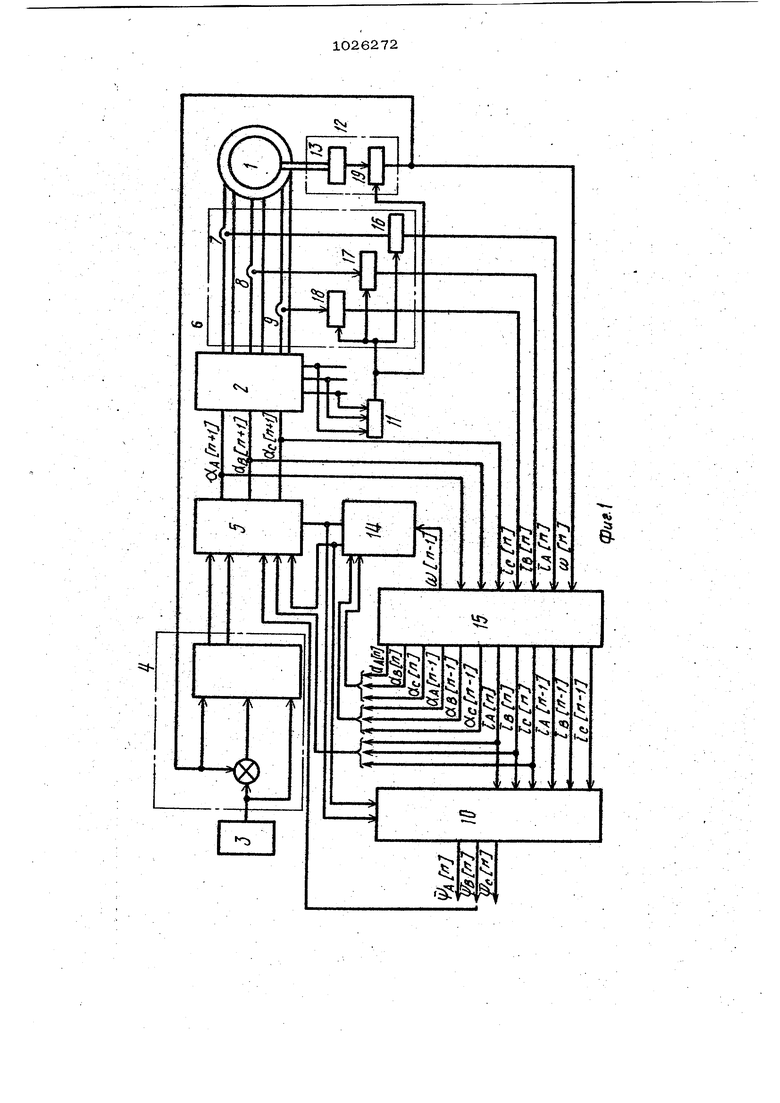
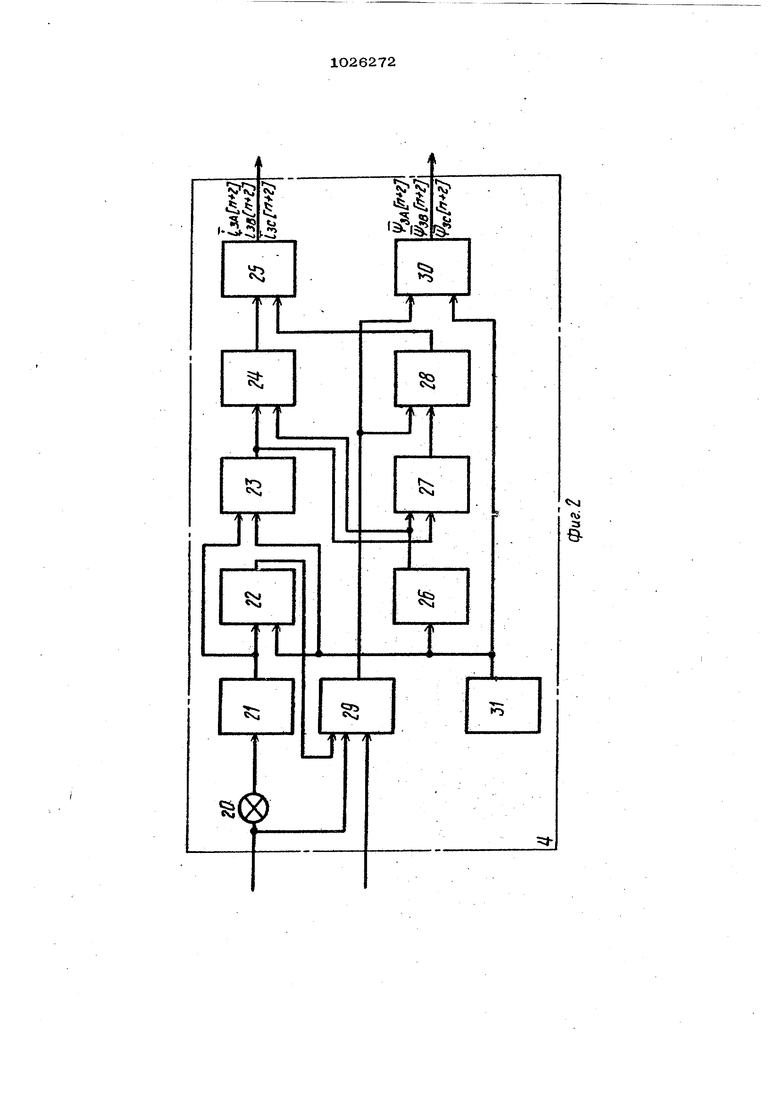
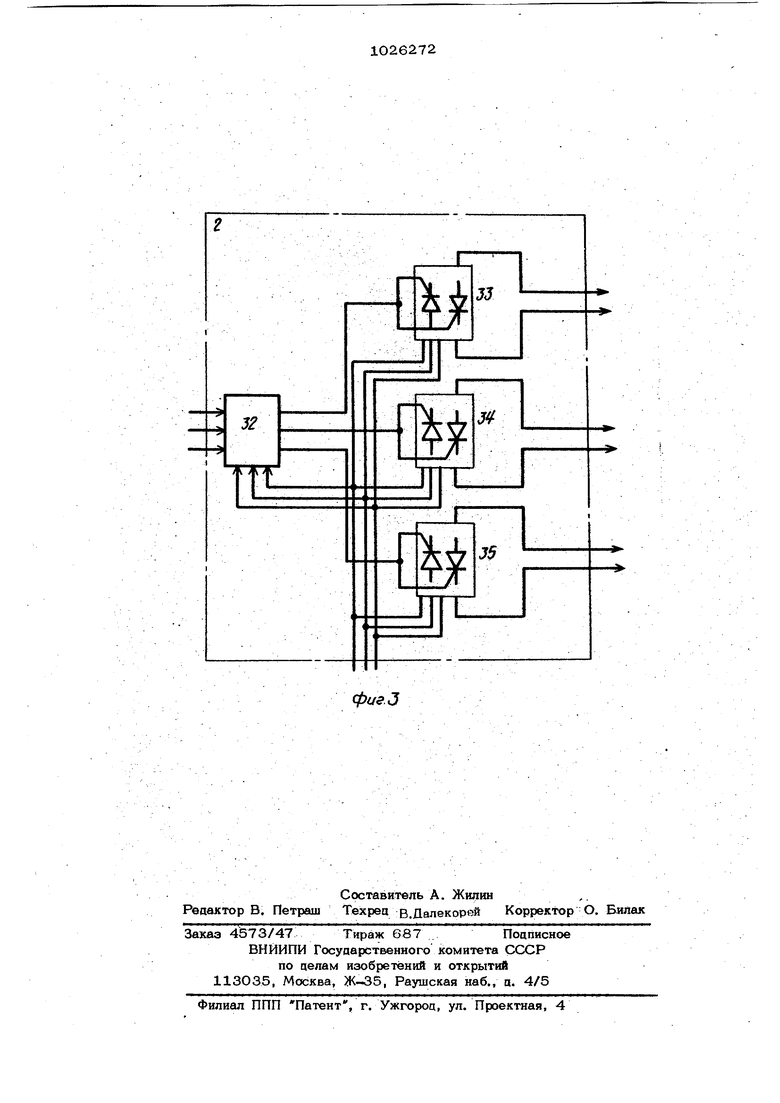
Изобретение относится к электротех нике, а именно к частотно-управляемым асинхронным электропривоцам и может быть использовано в системах, где опре- деляющими являются требования надежности и высоких динамических свойств, в частности в механизме роторного колеса экскаватора. Извесген злвктропривоц переменного тока, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого иоцключены к выходным зажимам рреобразователя частоты с непосредственной связью, подсоединенного к питающей сети, и соединены с датчшса- ми токов статора, а вал связан с датчиком скорости. В двигателе установлены датчики Холла, выходы которьгх совместно с выходами датчиков тока через преобразователи координат и рещающие устройства соединены с системой управления, выходы последней через преобразователи координат подсоединены к Входам управления преобразователя частоты с непосредственной связью. Система управления известного устройства представляет собой цвухканальную систему подчиненного регулирования. Один канал стабилизациимодуля вектора потока выполнен с подчиненным контуром регулирования тока намагничивания, второй канал регулирования скорости электродвигателя . с подчиненным контуром регУЛИрования активного тока электродвигателя. Каналы связаны между собой перекрестными связями l. Недостатком известного устройства является то, что установка датчика Холла сопряжена с изменением конструкции электродвигателя. Характеристики датчиков Холла существенно зависят от температуры, поэтому для осуществления точных измерений величины потокосцепления приходится создавать сложную систему температурной стабилизации. Кроме того, так как электропривод выполнен на базе аналоговой техники, то все рещаю щие устройства, используемые для определения гармонических функций, деления, умножения, представляют собой сложные и ненадежные устройства, имеющие , .чительные вычислительные погрешности. Наиболее близким к предлагаемому по технической сущности является электропривод переменного тока, содержащий асинхронный двигатель с короткозамкну- тым ротором, статорные обмотки которого подключены к преобразователю частоты с непосредственной связью, задатчик скорости вращения, вьосод которого подключен к первому входу блока задания фазных токов статора и потокосцепления, выходы которого через блок фазных регуляторов подключены к входам управления преобразователя частоты с непосредственной связью, блок датчиков фазных токов с фазными измерителями токов, связанный С блоком координатных преобразований, выходы которого подключены к соответствующим входам обратной связи блока фазных регуляторов, блока компенсирующих связей и .блока вычисления, датчик скорости вращения, выход которого подсоединен к BtopoMy входу блока задания фазйых токов статора и потокосдепления 2 . Недостатком известного электроприво- да является его, сложность и, соответственно, низкая надежность. Так как система управления устройства является непрерывней, то реализация на базе аналоговой техники нелинейного преобраэова.теля, связывающего значения абсолютного скольжения с моментом двигателя, связана с рядом трудностей. В частности, приходится п жбегать к кусочной линеаризации нелинейности, что обуславливает сложность настройки преобразователя и невысокую точность Возникают трудности при реализации преобразователей координат и вычислительного блОка, так как последние включают в себя операции умножения, деления и т.д., выполнение которых на базе аналоговой техники сопряжено со значительными погрешностями. Повышение же точности связано с усложнением вычислительных устройств. Неучет дискретных свойстс преобразователя частоты обуславливает необходимость введения дополнительных обратных связей по току, стабилизирующих его работу в режиме прерывистого тока, что определяет необходимость введения дополнительных элементов сравнения и усложняет электро привод. Косвенное опрецеление составляющих вектора потокосцепления в известном электроприводе определяет необходимость установки дополнительных датчиков фазных напряжений статора, что также услож няет электропривод и снижа.ет его нацежность, так как требует рещенйя вопроса гальванической развязки с системой управления и сохранения при этом высокой точности измерения сигнала. Кроме того, в известном электроприводе отсутствует возможность непосредственного сопряжения с цифровыми вычислительными блоками и различного рода программно-задающими устройствами. Цель изобретения - повышение качест ва в динамических режимах работы и надежности управления за счет регулирования усредненных за интервал дискретности преобразователя частоты токов ста тора, потокосцеплений рютор и скорости вращения. Поставленная цель достигается тем, что электропривод переменного тока, содержащий асинхронный двигатель с корот козамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты .с непосредственной связью, за- ватчик скорости вращения, выход которог вод ключей к первому входу формировател здания фазных токов статора и потокоецепления ротора, выходы которого через ф1ок фазных регуляторов подключены к йзсодам управления прзеобра.зователя часfOTbi с непосредственной связью, блок (ределения фазных токов с фазными щ мерителями токов, связанный с блоком |1}|4числения потокосцепления рютора, Ч хфазный выход которого подключен к (ютввтствующим входам обратной связи ( фазных регуляторов, блок синхро Ю|вации, блок определения скорости вращения с датчиком скорости, выход которого подсоединен к вторюму входу форми| ||1вателя задания фазных токов статора И потокосцепления ротора, снабжен аискретным блоком расчетных коэффикиентов и дискретным блоком оперативно памяти, входы которого соединены с выходами блока фазных регуляторов, блока определения фазных токов и блока опре10724 целения скорости вращения, первый и второй трехфазные выхоаы дискретного блока оперативной памяти соецинены соответственно с первым и вторым трегчфазными вхоцами блока вычисления по- токосцепления ротора, третий и четвертый трехфазные выхоцы и пятый выхоц дискретного блока оперативной памяти - с соответствующими вхоаами цискретного блока расчетных коэффициентов, первый и второй выхоаы которого соединены с соответствующими вхоцами управления блока фазных регуляторов и блока вычисления потокосцепления ротора, при этом второй трехфазный I выход дискретного блока оперативной памяти подключен к соответствующему входу обратной связи блока фазных регуляторов, а блок фазных регуляторов и блок вычисления потокосцепления ротора выполнены в виде многосвязных дискретных преобразователей, блок определения фазных токов рнабжен фазными интегральными аналогоцифровыми преобразователями, вход каж- дого из которых подключен, к выходу соответствующего фазного измерителя тока, а выход образует соответствующий фазный выход блока определения фазных токов, блок определения скорости вра- щения снабжен интегральным аналогоцифровым преобразователем, вход которого подключен к выходу датчика скорости, а выход образует выход блока определения скорости вращения, причем входы синхронизации интегральных аналогоцифровых преобразователей блоков определения фазных токов и скорости врюше- ния подключены к выходу блока синхронизации. На фиг. 1 представлена функциональ ная схема предлагаемого электропривода переменного тока; на фиг. 2 - функциональная схема формирователя задания фазных токов статора и потокосцеплени ротора; на фиг. 3 - функциональная схема преобразователя частоты с непосредственной связью. Электропривод переменного тока содержит асинхронный электродвигатель 1 с короткозамкнутым рютором (фиг. 1), статориые обмотки которого подключены к преобразователю 2 частоты с непосредственной связью, задатчик 3 скорюсти вращения, выход которого подключен к первому входу формирователя 4 задания фазных токов статора и потокосцепления pOTOpja, выхоцы которого через блок 5 фазных регуляторов подключены к входам управления прюобрзазователя 2 частоты с непосрецственной связыб. Электропривоц содержит блок 6 опрецеления фазных токов с фазными измерителями 7-9 токов, связанный с блоком Ю вычисления потокосиепления ротора, трехфазный вы, хоц которого поцключен к соответствующим вхоцам обратной связи блока 5 фазных регуляторов, блок 11 синхронизации и блок 12 определения скорости вра щения с датчиком 13 скорости, выход которого подсоединен к второму входу формирователя 4 задания фазных токов статора и потокосцепления ротора. Электропривод переменного тока-снабжен дискретным блоком 14 расчетных коэффициентов и дискретным блоком 15 оперативной памяти, входы которого соединены с выходами блока 5 фазных регу ляторов, блока 6 определения фазных токов и блока 12 определения скорости вращения. Первый и второй трехфазные выходы дискретного блока 15 оперативной памяти соединены соответственно с первым и вторым трехфазными входами блока 10 вычисления потокосцепления ротора, третий и четвертый трехфазные выходы и пятый выход указанного блока с соответствующими входами дискретного блока 14 расчетных коэффициентов, первый и второй выходы которого соединены с соответствующими входами управления блока 5 фазных регуляторов и блока 10 .вычисления потокосцепления ротора. Второй трехфазный выход дискрет ного блока 15 оперативной памяти подключен к соответствующему входу обратной связи блока 5 фазных регуляторов. Блок 5 фазных регуляторов и блок 1О вычисления потокосцепления ротора выпол нены в виде многосвязных дискретных преобразователей. Блок 6 определения фазных токов интегральными аналого-цифровыми преобразователями 16 18, вход каждого из которых подключен к выходу соответствующего фазного измерителя 7-9 тока, а выход является соответствующим фазным выходом блока 6 определения фазных токов. Блок 12 определения скорости вращения снабжен интегральным аналого-цифровым преобразователем 19. Входы синхронизации аналого-цифровых преобразователей 16 19 подключены к выходу блока 11 синхронизации. Формирователь 4 задания фазных токов статора и потокосцепления ротора содержит элемент 20 сравнения (фкг. 2) канал вычисления требуемых усредненных фазных. токов статора и канал вычисления требуемых усредненньис фазных потокосцеплений ротора. Канал вычисления требуемых усредненных фазных токов статора содержит блок 21 вычисления требуемого усредненного момента электродвигателя 1, Bxdb которого подключен к выходу элемента 2О сравнения , а выход - к одному из входов блока 22 вычисления усредненного скольжения и одновременно через один из входов блока 23 вычисления усредненной активной составляющей вектора тока статора и блока 24 вычисления модуля усредненного вектора тока статора подключен к одному из входов первого векторного преобразователя 25. В то же время второй вход блока 24 вычисления модуля усредненного вектора тока статора подсоединен к выходу блока 26 вычисления усредненной реактивной составляющей вектора тока статора, который одновременно подсоединен к одному из входов блока 27 вычисления угла между усредненными векторами тока статора и потокосцепления ротора, при этом его второй вход подсоединен к выходу блока 23 вычисления усредненной активной составляющей вектора тока статора. Выход блока 2 7 вычисления угла между усредненными векторами тока статора и потокосцепления ротора через один из входов блока 28 вычисления угла поворота усредненного вектора тока статора подсоединен к второму нкоду первого векторного преобразователя 25, выходы которого подсоединены к соответствующим цепям задания тока блока 5 фазных регуляторов. Канал вычисления требуемых усредненных фазных потокосцеплений ротора содержит блок 29 вычисления угла поворота усредненного вектора потокосцеппения ротора, один вход которого подсоединен к выходу блока 22 вычисления усредненного сколожения, второй - к выходу интегрального аналого-цифрового преобразователя 19, третий - к выходу задатчика 3 скорости, а вькод подсоединен к второму входу блока 28 вычисления угла поворота усредненного вектора тока статора и к оцному из входов второго векторного преобразователя 30. Второй вход второго векторного преобразователя ЗО, вход блока 26 вычисления усредненной реактивной составляющей вектора тока статора и вторые входы блока 22 вычисления усредненного скольжения и блока 23 вычисления активной усреанвнной составляющей вектора тока статора подсоединены к выхоау зацатчика 31 модуля усрецнеиного вектора потокосиепдения ротора. Выхоц второго векторного преобразователя ЗО поцсоединен к соответствукидим.цепям зацания потокосцепления блока 5 фазных регуляторов. Преобразователь 2 частоты с непосрец ственной связью содержит цифровую систему 32 импульсно-фазового управления (фиг. 3), входы управления которой подключены к выходам блока 5 фазных регуляторов, сйнхровходы подключены х питаю шей сети, а вьгходы - к управляющим электродам тиристоров фазных тиристорных преобразователей 33 - 35. Силовые входы фазных тиристорных преобразователей 33 - 35, подсоединены к трехфазной питающей сети, а выходы - к статору асинхронного электродвигателя 1 с короткозамкнутым ротором. Следует отметить, что блоки системы управления представляют собой цифровые устройства, выполненные на базе микропроцессорных БИС серии К-589. Электропривод переменного, тока работает следующим образом. В процессе работы мгновенные значения скорости ротора и фазных токов статора с выходов соответствующих измерителей 7-9 фазных токов и датчика 13 скорости непрерывно поступают на входы интегральных аналого-цифровых преобразо вателей 16 - 19 соответственно, аналого вые части которых представляют собой интегральные звенья. В свою очередь блок 11 синхронизации вырабатывает син хроимпульсы, моменты появления которых совпадают с точками естественной комму тации фазных тиристорных преобразователей 33 - 35,. а период следования равен интервалу дискретности преобразователя 2 частоты с непосредственной связью т.е. интервалу дискретности его фазных тиристорных преобразователей 33 - 35, причем длительность послеанего равна длят-фазного тиристорного преобразователя Т -г -)где сОо - круговая частота п {)т напряжения питающей сети, Синхроимпуль сы с выхода блока 11 синхронизации посту пают на сйнхровходы интегральных аналого цифровь1Х преобразователей 19, 16-18. По приходу синхроимпульса информа- ция, которая была накоплена до этого момента, т.е. за время истекшего интер вала дискретности, считывается с выходо интегральных аналого-цифровых преобраз вате лей 19, 16 - 18 и поступает на входы формирователя 4 задания фазных .токов статора и потОкосцепления ротора и дискретного блока 15 оперативной памяти и записывается в них. После этого содержимое упомянутых интегральных аналого-цифровых преобразователей обнуляется и ежи начинают накапливать новую информацию. В результате этого в конце каждогоп-го интервала дискретности преобразователя частоты с выходов интегральных аналого-цифровых преобразователей 19, 16 - 18 считывается информация, которая численно равна Ueb, ;f j %т„ т.е. усредненной за интервал дискретно- сти преобразователя частоты измеряемой величине. В итоге по окончании интервала дискретности преобразователя частоты с выходов интегральных аналого-цифровых )еобразователей 19, 16-18 считывается информация, численно равная значениям усредненных на интервале дискрет ности соответственно скорости ротора и фазных токов статора. Эти значения, как упоминалось выще, записываются в дискретный блок 15 оперативной памяти, в которой, кроме этого, на каждом интервале дискретности записываются значе ния углов управления преобразователем частоты с непосредственной связью, поступающие с выходов блока 5 разных регуляторов. Значения записанных в дискретный блок 15 оперативной памяти величин хранятся на протяжении двух интервалов дискретности. Функционально система управления электроприводом выполнена двухконтурной: внешний - контур регулирования усредненной за интервал дискретности скорости ротора; внутренний - коттур регулирования усредненных фазных токов статора и потокосиегшений ротора. При этом внутренний контур является оптимальным по быстродействию и позволяет отработать заданные значения усредненных фазных токов статора и потокосцеплений ротора за два интервала дискретности преобразователя частоты. В силу этого задания на эти величины выдаются на два интервала вперед. Рассмотрим работу устройства с начала (П+1 )-го интервала дискретности преобразователя 2 частоты с непосредственной связью, предполагая, что на h интервале закончилась отработка заданных ранее усредненных фазных токо статора, потокосцеплений ротора и скорое ги ротора. Задатчик 3 скорости рращения выдает .значение требуемой усредненной скорост ротора на (п+2)-м интервале дискретности ( 2. Последнее поступает на оаин из входов элемента 20 сравнения, второй вход которого по окончании И-го интервала поступает значение измеренно усредненной скорости ротора на п -м интервале дискретности to и с выхода интегрального аналого-цифрового прербразо вателя 19. Элемент 20 сравнения определяет значение разности между заданно на (И+2).4л и измеренной нап-м интернвале Дискретности усредненными скорост ми. Это значение поступает с выхода элемента 20 сравнения на вход блока 2 вычисления требуемого усредненного момента электродвигателя, осуществляющег расчет усредненного момента АЛ д, которы должен развивать асинхронный электродвигатель 1 на (п+1)-м и (tt+2)-M интервалах для того, чтобы отработать заданное значение усредненной скорости на (п+2|-м интервале дискретности. Блок 21 реализует следующую функцио нальную связь; Мэ ки з 1- 1-Й1-пЗ)-, где k-l - постоянный коэффициент, зависящий от параметров электроавигателя 1 Значение требуемого усредненного мо мента поступает с выхода блока 21 на один из входов блока 22 вычисления усредненного скольжения, на второй вход которого поступает значение модуля усредненного вектора потокосцепления ро« Topaltfpj с выхода задатчика 31. Причем модуль усредненного вектора потокосцепления ротора I ( t I задается задатчиком 31 исходя из условия поддержания его на заданном уровне. Блок 22 определяет значение усредненного скольжения СОсл которое должно поддерживаться на (h+1 )-м и (п+2 )-м интервалах дискретности для обеспечения требуемого усредненного момента электродвигателя 1. Блок 22 реализует следующую функциональную связь: СО j. Мэ/(К2 ), где. К2 - постоянный коэффициент, зависящий от параметров электродвигателя 1. В то же время значения усредненного электромагнитного момента Мэ с выхода блока 21 и моцуля усредненного вектора потокосцепления ротора с выхода задатчика 31 поступают на вход блока 23 вычисления усредненной актив- ; ной составляющей вектора тока статора. Последний осуществляет вычисление усредненной за интервал дискретности преобразователя частоты активной соста-, вляющей тока статора i , т.е. усрецнен- ной ортогональной вектору потокосцепле- ния ротора составляющей вектора тока статора, которая должна иметь место в асинхронном электродвигателе 1 на (in-l)-M и (h+2)-M интервалах дискретности для того, чтобы последний мог развить требуемый усредненный электромагнитный момент Мэ -Блок 23 реализует следующую связь: ia Гэ/(). КЗ - постоянный коэффициент, зависящий от параметров электродвигателя 1. Одновременно значение модуля усредненного вектора потокосцепления ротора поступает на вход блока 26 вычисления усредненной реактивной .составляющей вектора тока статора. Последний осущест Бляет вычисление усредненной за интервал дискретности преобразователя частоты J:eaктивнoй составляющей тока статора ip, т.е. усредненной параллельной вектору потокосцепления ротора составляющей вектора тока статора, которая должна иметь место в асинхронном электродвигателе 1 на )-м и (п+2)-м интервалах дискретности для того, чтобы обеспечить заданный модуль усредненного вектора потокосцепления ротора, т.е. заданный поток намагничивания электродвигателя 1. Блок 26 реализует следующую функциональную связь: ip K4-lVrU где К4 - постоянный коэффициент, зависящий от параметров электродвигателя 1. Значения обеих усредненных составляющих вектора тока статора поступают с выходов блоков 23 и 26 на входы блока 24 вычисления модуля усредненного вектора тока статора. Последний осуществляет вь числение модуля упомянутого векто- , paligi , реализуя выражение(, В то же время значения обеих усреденных составляющах вектора тока статора поступают на входы блока 27 вычисления угла между усредненными векторами, тока статора и потокосцепления ротора, осуществляющего расчет угла между упомянутыми векторами (р, который долен иметь место в асинхронном электровигателе 1 на (п-И)-м и (п+2)-м нтервалах дискретности, используя слеующее выражение arct (Го, /Гр). В СБОЮ очерець значения требуемой усредненной скорости ротора на (п+2)-м интервале цискретности преобразователя частотыСОаС 23 с выхода зааатчика 3 скорости вращения, измеренной усрецненной скорости ротора на Л -м интерьвале аискретности (3 «1 с выхода интегрального аналого-цифрового преобразователя 19 и усрецненного скольжения сЗси с выхода блока 22 вычисления усредненного скольжения поступают на входы блока 29 вычисления утла поворота усрецненного вектора потокосиепления ротора, осуществляющего вычисление требуемого углового положения усредненного вектора потокосцепления ротора на (Ji+2)-M интервале дискретности относительно фазы А статора используя выражениеpW + l WcK W tni l+ooWlT, запоминают его, после чего полученное значение поступает на один из входов блока 28 вычисления угла поворота усре ненного вектора тока статора. Блок.28 осуществляет суммирование требуемого угла поворота усредненного вектора потокосцепления ротора на (ii+2 интервале цискретности относительно .фазы А статора с требуемым углом меисду усредненными векторами тока статора и потокосиепления ротораСр, значение кото рого поступает на второй вход блока 28 с выхода блока 27. В результате блок2 осуществляет вычисление требуемого угла поворота усредненного вектора статора на (П+2)-м интервале дискретности относительно фазы А статора ч 21 . 4tp. Выходная информация блоков 24 и 28 29 и задатчика 31 полностью определяет усреднение вектора тока статора и потокосцепления ротора на (1И-2)-м инте вале дискретности. Значения модуля усрецненного вектора тока статора с вы ходов блока 24 vi его углового положения на (п+2)-м интервале дискретности с выхода блока 28 поступают на в.ходы первого векторного преобразователя 25. Последний вычисляет направляющие косинусы усредненного вектора тока статора на (tt+2)-M интервале дискретноста, после чего осуществляет определение требуемых усрецненных фазных токов статора на (п+2) интервале дискре ности1зл1 1 -211, . утем разложения упомянутого вектора по сям фаз статора. Аналогично значения одуля усредненного вектора потокосцеп- ения ротора с выхода задатчика 31 и го углового положения на (П+2)-м инервале цискретности с выхода блока 29 оступают на в.ходы второго векторного реобразователя 30. Последний вьтчисля- т направляющие косинусы усредненного ектора потокосцепления ротора на (й+2 )-м нтервале цискретности, после чего осуествляет определение требуемых усреденных фазных потокосцеплений ротора а (п+2 )-м интервале цискретности ,, путем разложения упомянутого вектора по осям фаз статора. Значения вычисленных усредн ных фазных токов статораТ,д п+2 ,5в Lti 21 .-i зс и потокосцеплений ротора (. VjcCl поступают с выходов векторных преобразователей 25 и 30 в цепи заданий усрецненных фазных токов статора и потокосцеплений ротора блока 5 фазных регуляторов. При этом следует отметить, что определение функций корня квадратного в блоке 24, арктангенса в блоке 27 и косинусов в векторных преобразователях 25 и 30 осуществляется табличным способом, т.е. значения функций предварительно вычисляются в необходимом диапазоне и записываются в постоянные запоминающие устройства, которыми снабжены упомянутые блоки и векторные преобразователи. Постоянные коэффициенты XI+K4 Также предварительно вычисляются для кажцого конкретного электродвигателя и записываются в постоянные запоминающие устройства, которыми снаб.жены локи 21-23и26. Для расчета углов управления преобразователем 2 частоты на (h-H)-M и (П+2 )-м интервалах дискретности требуется кроме информации об усрецненных фазных токах статора иметь информацию об усредненных фазных потокосцеплениях ротора и напряжения статора наП-м интервале дискретности, которые определяются в электроприводе расчетным путем. Вычисление усредненны.х фазных пото- .косцеплений ротора нап -м интервале цискретности осуществляет блок 10 вычисления потокосцеплений ротора по выражению .jM W4C2j, j-A,B,C , |и.(,,..фс5р,,СбД где 1цМт U. - усредненные за ияте {U A,B,Cвал цискретности фазные токи и напряжен статора на rt -м интер вале; (ubOi |uC усредненные за инте ,B,Csen дискретности фаа ные токи и напряжен статора на (и-1)-м интервале} itn - усредненные за интер iiA.B.C вал дискретности фаз ные потокосцепления ротора на ц -м интервале. Так как система управления синтезирована в, неподвижной системе координат привязанной к осям статора, то коэффициенты .j зависят от параметров конкретного электродвигателя 1 и от усредненной скорости ротора на (г)-1)-м интервале дискретности коэффициенты С 5 (u,С 6л, j зависят от параметров электродвигателя 1, усредненной скорости на (t}-l)-M интервале дискретности со tn-lj и от углов управления преобразователем 2 соответственно на ft-м и (n-l)Hvi интервалах дискретности, По окончании (h-l)-го интервала дискретности значение усредненной измеренной скоростиcotii-Q записывается в дискретный блок 15 оперативной памят где уже хранятся значения углов управления преобразователем 2 на ()-м интервале дискретности. Поэтому в на- чалеМ-го интервала дискретности значения упомянутых величин поступают на входы дискретного блока 14 расчетных коэффициентов и псюледний начинает расчет коэффициентов и величин, входящих в выражение для усредненных потокосцеплений,. в первую очередь производится определение коэффициентов С ( л, г С 4 «ц i , которое осуществляется табличным способо т.е. их значения предварительно рассчитываются для конкретного электродвигателя 1 для всего диапазона изменения скорости и записываются в постоянное запом1шающее устройство, которое содержит дискретный блок 14 расчетных коэффициентов. После этог& блок 14 осуществляет расчет усредненных, фазных напряжений статора на (п-1)-м интервале дискретности и значений коэффициентовС6|и,|. Усредненные напряжения статора равны усредненным фазным напряжениям преобразователя 2 частоты с непосредственной связью, а последние, как известно, являются гармоническими функциями от углов уп{завления преобразователем U jy п - А со s(eijn t Ч1). Коэффициенты Сб j 5{U,| рассчитываюiw ся по элементарным арифметическим выражениям, содержащим слагаемые, зависящие от усредненной скорости GO Cn-il, и гармонические функциизшВ ,со9о , фазы которых зависят как от усредненной скорости , так и от углов управления преобразователем собтветственно на (tl-l)-M иП-м интервалах дискретности. Значениягармонических функций, входящих в выражения для усредненньпс фазных напряжений преобразователя и для коэффициента С 6 |ц; , а также сла гаемых, зависящих только от механической скорости, определяются в дискретном блоке 14 расчетньк коэффициентов табличным способом после чего вычисляются искомые величины U m jc , С6 {u, j . После расчета углов управления преобразователем 2 частоты с непосредственной связью наУ1-м интервале {на что уходит 10% от длительности интервала дискретности) их значения поступают с выхода блока 5 фазных регуляторов на входы блока IS оперативной памяти, после записи в который они поступают на входы блока 14 расче-гаых коэффициентов. Последний после этйго осуществляет расчет усредненных фазных напряжений преобразователя нам-м интервале UjuChJ и значения коэффициентов С5 /ц j подобно описанному выше. Все рассчитанные коэффициенты и величины с второго иы- хода блока 14 расчетных коэффициентов. поступают на вход управления блока 1О вычисления потокосцепления ротора Кроме того, значения усредненных фазных напряжений преобразователя нал-м интервале Уд, п1 с первого вы.хс«а блока 14 расчетных коэффициентов поступают на вход управления 5 фазных регуляторов. Одновременно с выхода дискретного блока 15 оперативной памяти на входы блока Ю вычисления потокосцеплення ротора поступают значения усредненных фазных токов ста тора irtj n-llj В ре зультате этого уже к концу ti -го интервала блок 10 определяет значения выражений (,u;.«,n-OK3fu,j-U(,,-v ,в.С 1 J I ,)-., 1,где j В, В, С. По окончании п-го интервала в блок 15 оператив-: ной памяти поступает информация об ус- редненных скорости ротора СО и фазных токах статора с выходов интегральных аналого-цифровых преобразователей 19, 16 - 18. После записи в оперативную память значения последних поступают в один из каналов обратной связи блока 5 фазных регуляторов и на входы блока 1О, благодаря чему последний заканчивает расчет усредненных фазных потокосцеплений ротора и определяет значения ч , Ц в СЮ . Vc Следует отметить, что вычисление усредненных напряжений статора косвенным путем и распараллеливание процессов вычислений, как описано выше, позволяет свести время, затрачиваемое в (п+1)-м интервале дискретности на расчёт усредненных фазных потокосцеплений ротора.на п -м интервале дискретности, к минимуму, что уменьшает запаздывание системы управ- ления устройства и улучшает динамику управления. Значения рассчитанных усредненных фазных потокосцеплений ротора . McL l поступают с выхода блока 1О вычисления потокосцепления ротора в один из каналов обратных связе блока 5 фазных регуляторов. Коэффициенты блока 5 фазных регуляторов R1 (u. и Р5 ju,j являютс функциями от параметров электродвига- теля 1, усредненной скорости ротора и углов управления преобразователем час тоты н&П-м интервале дискретности. Поэтому сразу после окончания П -го интервалами записи значения усредненной скорости ад . в дискретный блок 15 оперативной памяти ее значение с выхода пОспецнего совместно со значениями углов управления оСц, поступают на входы дискретного блока 14 расчетных коэффициентов, который осуш.ествляет расчет упомянутых коэффициентов. Коэффициенты блока 5 фазных регуляторов вычисляются по элементарным- арифметическим выражениям, содержащим слагаемые, зависящ от параметров электродвигателя 1 и, усредненной скорости ротора со , а также гармоническиефункции ,0055, фа которых, в свою очередь, зависят от пар метров электродвигателя 1,.усредненной скорости ротораCjO|| i3 ,и от углов управления преобразователем 2 частоты с непосредственной связью на И -м интервале дискретности. Как слагаемью, зависящие только от I параметров электродвигателя 1 и от усредненной скоростисо и, так и необходимые гармонические функции31П§ ,С05О вычисляются в блоке 14 табличным способом, как упоминалось вьпие, после чего дискретный блок 14 расчетных коэффициентов производит окончательный расчет коэффициентов Rlf,jfR5|u,j ,P(U,j fPSyu.j. Значения последних, равно как и углов управления преобразователем частоты {/(yuW, поступают с первого выхода блока 14 расчетных коэффициентов на вход управления блока 5 фазных регуляторов. После этого последний осуществляет расчет углов управления преобразователем 2 частоты с непосредственной связью на {М+1)-м интервале дискретности по следующим вь1ражениям RV.i4|yt + ..i (.rOfuM, ГдеГ(, ф„ l+1 - задания усредненных за ai-ABCинтервал дискретности фазных токов статора и потокосцеплений ротора на (п-ь2)-м интервале; «iMi-(uW,|4W усредненные за интервал М-Л В Сдискретности фазные то- ки, напряжения статора и потокосцепления ротора на П -м интервале; lAit Oi iW - Уль управления преобразо...дц(вателем частоты с непооредственной связью соответственно на (Н-н1)-м и п -м интервалах дискретности. Значения рассчитанных углов управления преобразователем 1. на (h+1 )-м интервале дискретности поступают в цифровом коде на входы управления цифровой системы 32 импульсно-фазового управления (фиг. 3). Последняя представляет собой трехканальный преобразователь цифровой код - временной интервал, синхронизированный с питающей сетью, которая преобразует цифровые коды управленияоС Спм. в импульсы, поступающие с ее выходов на управляющие электроды тиристоров фазных тиристорных преобразователей 33 35, в результате чего на статор асинхронного электродвигателя 1 поступают требуемые напряжения, В начале (tH-2)-ro интервала дискретмости блок 5 фазных регуляторов осуществляет расчет углов управления преобн разователем частоты 2 по упомяну тым выражениям, только с аругими коэф фициентами ,п.,1.,;.,.,п.2 .e.cju,A,9.c PV,iH3 urn +P3p |.. P,j-U(. Значения рассчитанных углов управления преобразователем на (И+2)- vane вале п,1 + 2 в цифровом коде поступают с выхода блока 5 фазных регуляторов на входы управления преобразователя 2 частоты с непосредственной связью, ко- торый в дальнейшем работает подобно тому, как описано выше. В результате этого на (lH-l) и (п+2)-м интервалах дискретности на статор электродвигателя 1 подаются та- кие напряжения с выхода преобразователя 2 частоты, которые позволяют отрабо тать на (h+2 )-м интервале дискретности заданные усредненные токи статора, пото косцепления рютора и скорость рогора. Работа электропривода на последующи интервалах дискретности осуществляется подобным образом, Таким образом, управление электродвигателем в электроприводе осуществляетс 1 путем дискретного регулирования усредненных за интервал дискретности преобразователя частоты с непосредственной связью скорости ротора и пространственных векторов тока статора и потокосиепления ротора. Управление осуществляется в неподвижной системе координат, в силу чего отпадает необходимость в ее ориентации. В электроприводе при управлении по усредненным за интервал дискретности скорости ротора, фазным токам статора и потосцеплениям ротора учитываются дискретные свойства управляемого объекта. Управление в неподвижной системе координат позволяет отказаться от сложных и ненадежных преобразователей координат. Реализация системы управления на базе цифровой техники позволяет осуществлять вычислительные операции умножения, деления, вычисления функций и.т,п. более просто и точно, в результате чего все расчеты, в частности, косвенное определение усредненных фазных потокосцеплений ротора и напряжений статора, осуществляются с высокой степенью точности, Кроме того, имеется возможность непосредственного сопряжения системы управления электроприводом с цифровыми вычислительными и различного рода программно-задающими блоками других устройств и систем. Таким образом, введение в электропривод дискретных блоков расчетных коэффициентов и оперативной памяти, а также выполнение блока определения азных токов и скорости вращения с интегральными аналого-цифровыми пребразователями обеспечивают повышение адежности управления и улучщение каества в динамических режимах работы. °
«м
vi ::з
е
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дацковский Л | |||
| X., Тарасенко Л | |||
| М | |||
| и др | |||
| Синтез систем подчиненного регулирования в асинхронных электроприводах.- Электричество, 1975, № 9 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
