Изобретение относится к роторным траншейным экскаваторам (с глубиной коиания 3 м и более), включающим тягач, укреиленную на нем вертикальную направляющую раму и рабочий орган в виде ротора с ковшами, установленный на его раме. Последняя соединена с кареткой, которая может перемещаться но вертикальной направляющей раме. Эти экскаваторы имеют прицепной рабочий орган. Однако, при глубине копания 3 м и более и диаметре ротора 4,7 л для перевода рабочего органа в транспортное положение и получения необходимого клиренса, точка подвески рабочего органа должна иеремещаться на высоту (от уровня земли) до 4,8 м. Выполнение же таких экскаваторов ио обычной схеме подвески приводит к необходимости ири каждой транспортировке разбирать их (из-за превышения железнодорожных и транспортных габаритов), что значительно ухудшает эксплуатационные качества машин.
Предлагаемое изобретение создает возможность уменьшить транспортную высоту экскаваторов и уменьшить усилия, действующие на .тягач.
Для этого вертикальная направляющая рама экскаваторов выполняется в виде неподвижной рамы, соединенной пальцами с рамами гусеничных тележек тягача. Внутри рамы смонтирована - с возможностью перемещения
посредством, например, гидроцилиндра - подвижная рама с роликами, огибаемыми цепями, которые одними концами прикреплены к неподвижной раме, а другими - к перемещающейся ио внутренней раме каретке. На последней установлено фиксирующее устройство, обеспечивающее установку рабочего органа на треб емой высоте при копании и в транспортном положении. Фиксирующее устройство
состоит из шариирио ирикреплеииой к каретке подпружиненной собачки, взаимодействующей с упорами, прикрепленными на различной высоте к неподвижной раме. Двойной щарнир, соединяющий рабочий орган с тягачом, выполней из двух шарниров, один из которых, расположенный в горизонтальной плоскости, установлен на каретке, а второй, расположенный в вертикальной плоскости, на раме рабочего органа. Подъем подвижной рамы может
быть произведен также с помощью пневмоцилиндра.
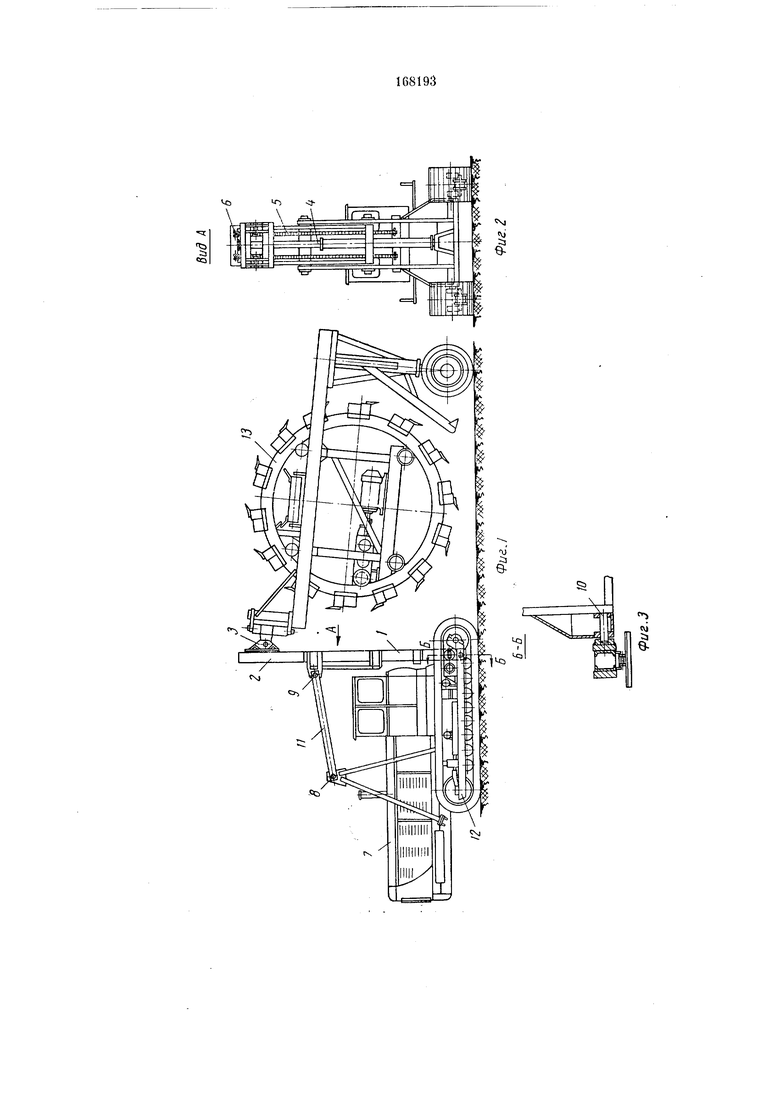
На фиг. 1 схематически изображен роторный траншейный экскаватор; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез по Б-Б на
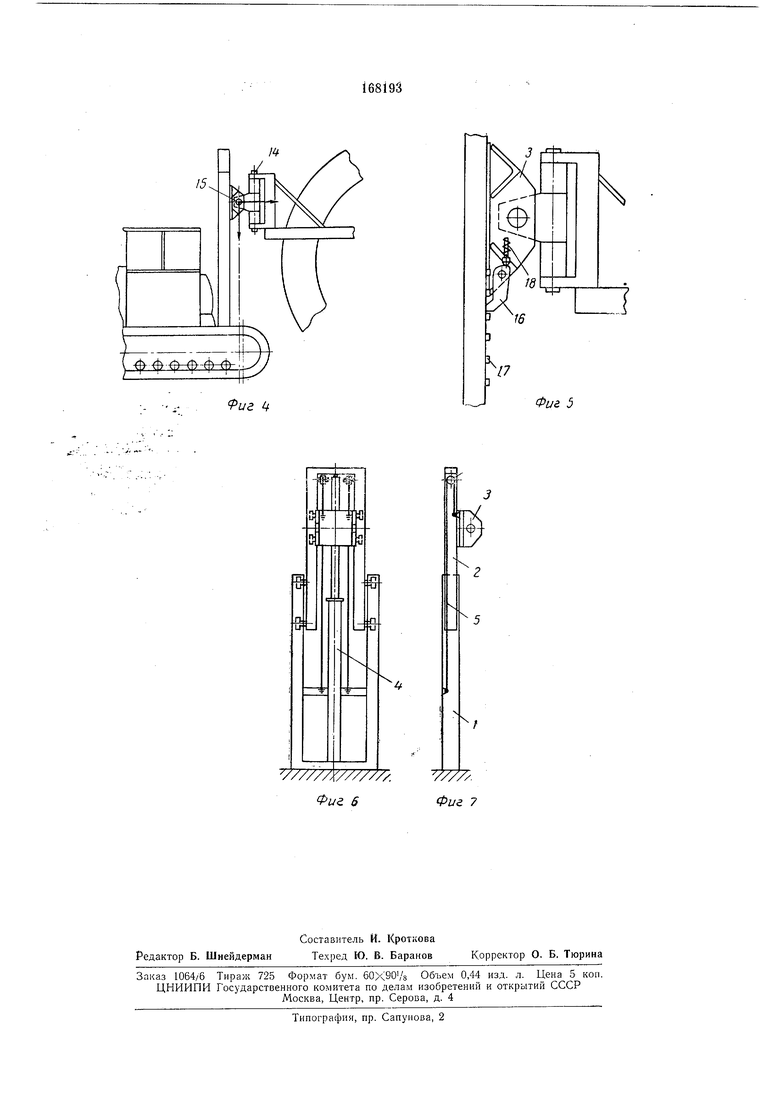
фиг. 1; на фиг. 4 - двойной шарнир экскаватора; на фиг. 5 - фиксирующее устройство экскаватора; на фиг. 6 и 7 - схема подвижной рамы в двух ироекциях. Вертикальная направляющая рама выполнерой перемещается подвижная рама 2. По раме 2 скользит каретка 5. Подвижная рама 2 выдвигает; я с помощью гидроцилиндра 4, Цепи 5 закреплены на неподвижной раме / и на каретке 5 и перекинуты через ролики 6 на подвижной раме 2. При перемещении зтнх роликов вместе с подвижной, рамой 2 на расстояние I, цеии 5 создают условия перемещения каретки 5 на расстояние 2/. При перевозке машины на платформе рабочий орган опускается вниз, иодвижная рама 2 также опускается вплотную к каретке 5 и не выходит за габарит наружной неподвижной рамы L Прп этом цепи 5 ослабевают и провисают. Это иозволяет иметь ход шарнира подвески от транспортного положения до положения погрузкн меньший, чем ход рамы 2. Неподвижная рама / крепится на тягаче 7 с помощью пальцев 8, 9 и 10. Пальцы 8 и 9 соединяют раму / с рамой И тягача 7, пальцы 10 закреплены непосредственно с внутренней стороны на гусеничных тележках 12. Благодаря этому тяговые и вертикальные нагрузки от рабочего органа 13 в виде ротора с ковшами передаются на ходовую часть тягача 7. (в отличие от других машин) не через задний мост, трактора, а непосредственно. Задний мост разгружается. ДнзелЬ - электрический привод позволяет соединять рабочий орган 13 с тягачом 7. Соединение осуществляется с помощью двойного щарнира с взаимно иерпендикулярными осями, состоящего из вертикального шарнира 14, совмещенного с рамой рабочего органа 13, и горизонтального щарнира 15, установленного на каретке 5 рамы тягача. Это дает уменьщение опрокидывающего момента почти в 2 раза. Для того, чтобы фиксировать подвижную каретку 3 в положениях, соответствующих разной глубине копания, и в транспортном положении, не нагружая при этом цепи 5, гидроцилиндр 4 и подвижную раму 2, на экскаваторе применено сиециальиое фиксирующее устройство. Оно состоит из подпружиненной собачки 16, щарнирио укрепленной на каретке 3, и упоров 17, приваренных к неподвижной раме / на высоте, соответствующей разным глубинам копания. Собачка 16 заходит за упор 17 и не дает каретке 3 перемеьцаться вниз. Перемещению каретки 3 вверх подпружиненная собачка 16 не препятствует. Для опускания каретка 3 сначала приподнимается вверх, собачка 16 выводится из зацепления и фиксируется щтифтом с пружиной 18 в отведенном положении, после чего каретка 3 опускается. Предмет изобретения Роторный траншейный экскаватор, включающий тягач, укреиленную на нем вертикальную направляющую раму и рабочий оргаи в виде ротора с ковшами, установленный на своей раме, соединенной с кареткой, имеющей возможность перемещения по вертикальной направляющей раме, отличающийся тем, что, с целью обеспечения возможности уменьшения транспортной высоты экскаватора и уменьшения усилий, действующих на тягач, его вертикальная направляющая рама выполнена в виде соединенной при помощи пальцев с рамами гусеничных тележек тягача неподвижной рамы, внутри которой смонтирована с возможностью перемещения посредством, например, гидроцилиндра подвижная рама с роликами, огибаемыми цеиями, прикрепленными одними концами к неиодвижной раме, а другими - к перемещающейся по внутренней раме каретке, на которой установлено фиксирующее устройство, обесиечивающее установку рабочего органа на требуемой высоте при копании и в транспортном положении и состоящее из щарнирно прикрепленной к каретке подпружиненной собачки, взаимодействующей с упорами, прикрепленными на различной высоте к неподвижной раме, а двойной щарнир, соединяющий рабочий орган с тягачом, выполнен из двух шарниров, один из которых, расположенный в горизонтальной плоскости, установлен на каретке, а второй, расноложенный в вертикальной плоскости, на раме рабочего органа.
ta a 00
иг LIФиг 5
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1969 |
|
SU248554A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1992 |
|
RU2034961C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1993 |
|
RU2035550C1 |
| Роторный экскаватор | 1981 |
|
SU990974A1 |
| Способ разработки траншей разной ши-РиНы и уСТРОйСТВО для ОСущЕСТВлЕНияСпОСОбА | 1979 |
|
SU840240A1 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1972 |
|
SU324343A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1964 |
|
SU165407A1 |
| Машина для монтажа трубопровода в траншее | 1985 |
|
SU1432152A1 |
V//////.
Фиг 6
