Изобретение относится к прядильному оборудованию и предназначено для намотки нити на паковку при одновременной ее раскладке и кручении
Цель - расширение функциональных возможностей путем совмещения операций намотки, раскладки и кручения нити
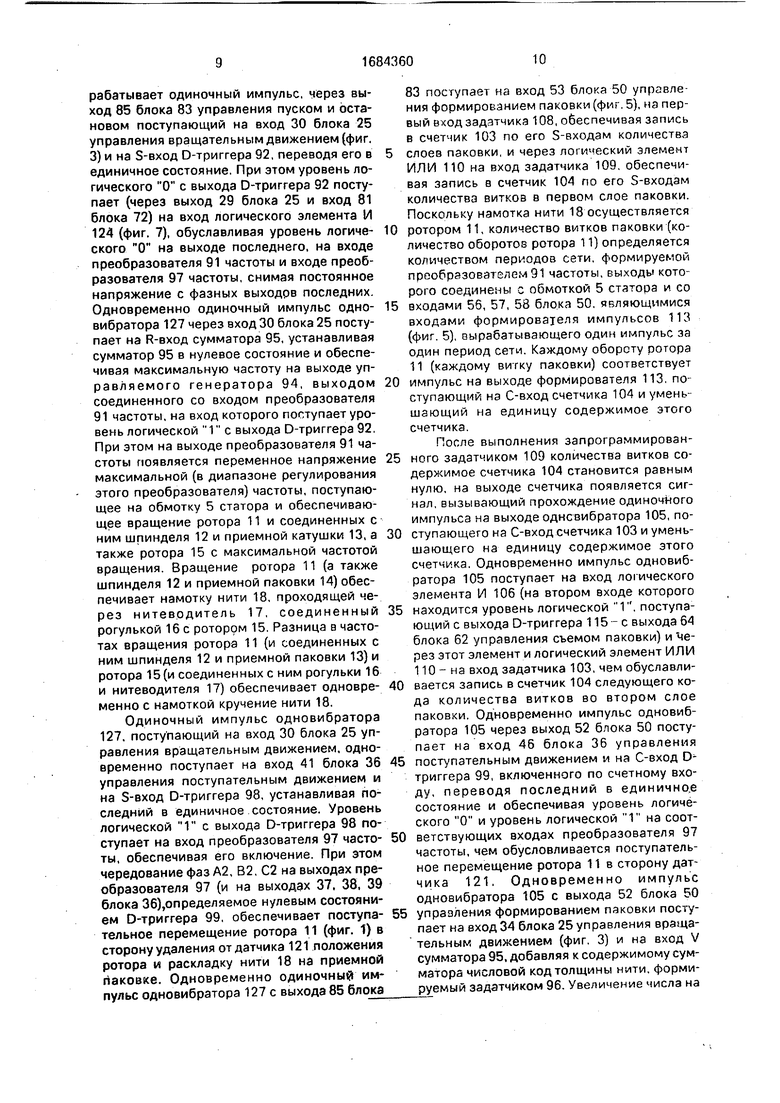
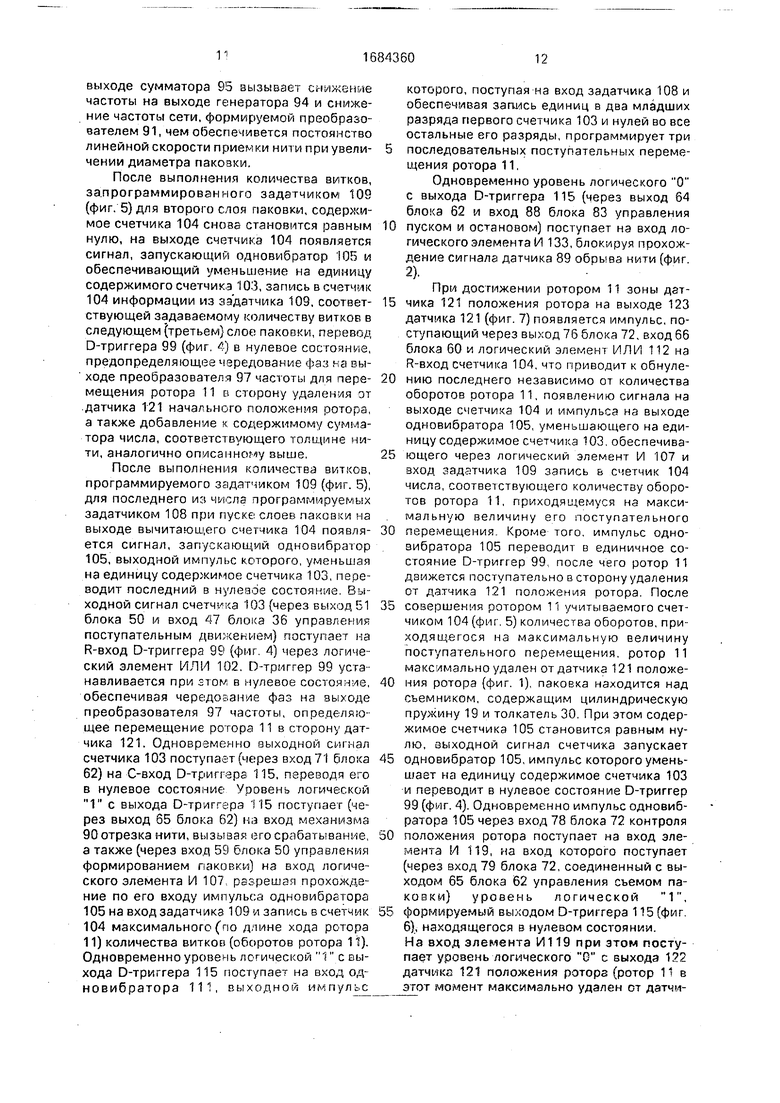
На фиг 1 представлен общий вид модуля, на фиг 2 - структурная схема системы управления, на фиг 3 схема блока управления вращательным движением на фиг 4 - схема блока управления поступательным движением, на фиг 5 - схема блока управлением формированием паковки; на фиг 6 - схема блока управления съемом паковки; на фиг. 7 - схема блока контроля положения ротора, на фиг 8 - схема блока управления пуском и остановом
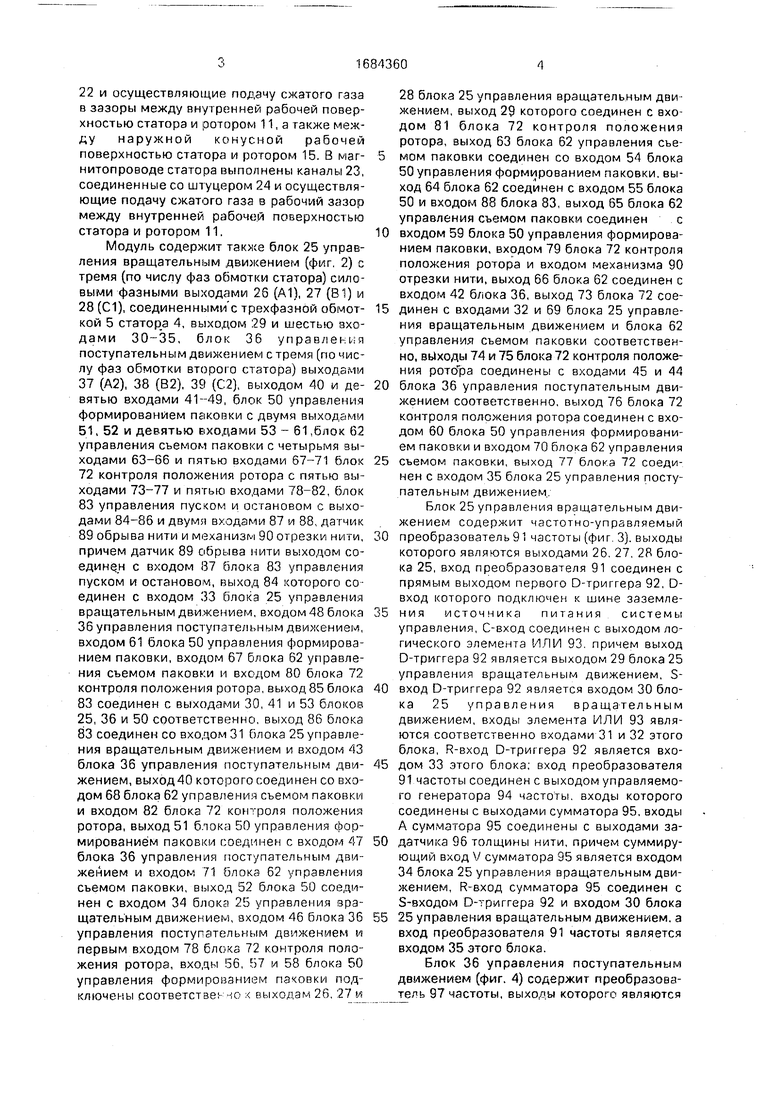
Модуль содержи г (фиг 1) корпус 1, установленный при помощи внешних амортизаторов 2 на несущей плите 3, статор 4 с непрерывной обмоткой 5 уложенной в пазы, выполненные с наружной и внутренней сторон статора 4, внутренняя рабочая поверхность которого имеет цилиндрическую
расточку и покрыта слоем 6 немагнитного антифрикционного материала а наружная рабочая поверхность выполнена в виде усеченного сверху конуса и покрыта слоем 7 немагнитного антифрикционного материала статор, выполненный из чередующегося набора ферромагнитных шайб 8 и плоских катушек 9, образующих обмотку статора цилиндрическая расточка которого соосна и равна по диаметру цилиндрической расточке другого статора, а рабочая поверхность покрыта слоем 10 немагнитного антифрикционного материала, ферромагнитный синхронный ротор 11, общий для обоих статоров и несущий шпиндель 12 с приемной катушкой 13 и паковкой 14 причем длина синхронного ротора превышает суммарную длину обоих статоров на длину паковки ротор 15, снабженный рогулькой 16 с нитеводителем 17 ведущим нить 18 причем в верхней части рогульки смонтирован центробежный съемник содержащий цилиндрическую пружину 19 и толкатель 20 В магнитопроводе первого статора выполнены каналы 21, соединенные с п штуцером
fe
О 00
00
о о
22 и осуществляющие подачу сжатого газа в зазоры между внутренней рабочей поверхностью статора и ротором 11, а также между наружной конусной рабочей поверхностью статора и ротором 15. В маг- нитопроводе статора выполнены каналы 23, соединенные со штуцером 24 и осуществляющие подачу сжатого газа в рабочий зазор между внутренней рабочей поверхностью статора и ротором 11.
Модуль содержит также блок 25 управления вращательным движением (фиг. 2) с тремя (по числу фаз обмотки статора) силовыми фазными выходами 26 (А1), 27 (В1) и 28 (С1), соединенными с трехфазной обмоткой 5 статора 4, выходом 29 и шестью входами 30-35, блок 36 управления поступательным движением с тремя (по числу фаз обмотки второго статора) выходами 37 (А2), 38 (В2). 39 (С2), выходом 40 и девятью входами 41-49, блок 50 управления формированием паковки с двумя выходами 51, 52 и девятью входами 53 - 61,блок 62 управления сьемом паковки с четырьмя выходами 63-66 и пятью входами 67-71 блок 72 контроля положения ротора с пятью выходами 73-77 и пятью входами 78-82. блок 83 управления пуском и остановом с выходами 84-86 и двумя входами 87 и 88, датчик 89 обрыва нити и механизм 90 отрезки нити, причем датчик 89 обрыва нити выходом со- единон с входом 87 блока 83 управления пуском и остановом, выход 84 которого со единен с входом 33 блока 25 управления вращательным движением, входом 48 блока 36 управления поступательным движением, входом 61 блока 50 управления формированием паковки, входом 67 блока 62 управления съемом паковки и входом 80 блока 72 контроля положения ротора, выход 85 блока 83 соединен с выходами 30. 41 и 53 блоков 25, 36 и 50 соответственно, выход 86 блока 83 соединен со входом 31 блока 25 управления вращательным движением и входом 43 блока 36 управления поступательным движением, выход 40 которого соединен со входом 68 блока 62 управления съемом паковки и входом 82 блока 72 контроля положения ротора, выход 51 блока 50 управления формированием паковки соединен с входом 47 блока 36 управления поступательным движением и входом 71 блока 62 управления сьемом паковки, выход 52 блока 50 соединен с входом 34 блока 25 управления вращательным движением, входом 46 блока 36 управления поступательным движением и первым входом 78 блока 72 контроля положения ротора, входы 56, 57 и 58 блока 50 управления формированием паковки подключены соответственно к внходэм 26. 27 и
28 блока 25 управления вращательным движением, выход 29 которого соединен с входом 81 блока 72 контроля положения ротора, выход 63 блока 62 управления сьемом паковки соединен со входом 54 блока 50 управления формированием паковки, выход 64 блока 62 соединен с входом 55 блока 50 и входом 88 блока 83, выход 65 блока 62 управления сьемом паковки соединен с
0 входом 59 блока 50 управления формированием паковки, входом 79 блока 72 контроля положения ротора и входом механизма 90 отрезки нити, выход 66 блока 62 соединен с входом 42 блока 36, выход 73 блока 72 сое5 динен с входами 32 и 69 блока 25 управления вращательным движением и блока 62 управления сьемом паковки соответственно, выходы 74 и 75 блока 72 контроля положения рото ра соединены с входами 45 и 44
0 блока 36 управления поступательным движением соответственно, выход 76 блока 72 контроля положения ротора соединен с входом 60 блока 50 управления формированием паковки и входом 70 блока 62 управления
5 сьемом паковки, выход 77 блока 72 соединен с входом 35 блока 25 управления поступательным движением.
Блок 25 управления вращательным движением содержит частотно-управляемый
0 преобразователь 91 частоты (фиг 3). выходы которого являются выходами 26. 27. 28 блока 25, вход преобразователя 91 соединен с прямым выходом первого D-триггера 92. D- вход которого подключен к шине заземле5 ния источника питания системы управления, С-вход соединен с выходом логического элемента И ПИ 93 причем выход D-триггера 92 является выходом 29 блока 25 управления вращательным движением, S0 вход D-триггера 92 является входом 30 блока 25 управления вращательным движением, входы элемента ИЛИ 93 являются соответственно входами 31 и 32 этого блока, R-вход D-триггера 92 является вхо5 дом 33 этого блока; вход преобразователя 91 частоты соединен с выходом управляемого генератора 94 частоты, входы которого соединены с выходами сумматора 95. входы А сумматора 95 соединены с выходами за0 датчика 96 толщины нити, причем суммирующий вход V сумматора 95 является входом 34 блока 25 управления вращательным движением, R-вход сумматора 95 соединен с S-входом D-триггера 92 и входом 30 блока
5 25 управления вращательным движением, а вход преобразователя 91 частоты является входом 35 этого блока.
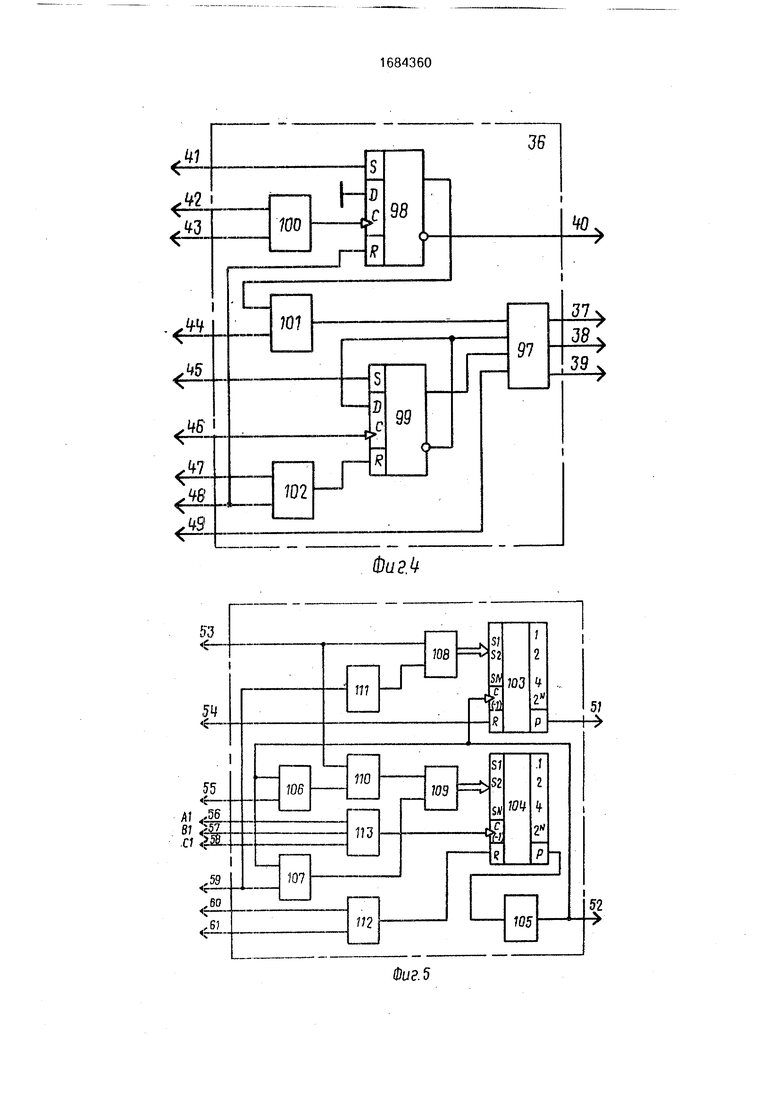
Блок 36 управления поступательным движением (фиг. 4) содержит преобразователь 97 частоты, выходы которого являются
выходами 37, 38 и 39 блока 36, D-григгер 98, выход которого является выходом 42 блока 36, а D-вход соединен с шиной заземления источника питания системы управления, D- триггер 99, логический элемент ИЛИ 100, выходом соединенный с С-входом D-тригге- ра 98, логический элемент ИЛИ 101, входом соединенный с выходом D-триггера 98 я выходом - с входом преобразователя 97 ча стоты, логический элемент ИЛИ 102, выходом соединенный с R-входом D-триггера 99, выходом соединенного с D-входом и со входом преобразователя 97 частоты, входом соединенного с входом этого преобгазова- теля, причем S-вход D-триггера 98 является входом 41 блока 36, сходы элемента ИЛИ 100 являются соответственно входами 42 и 43 блока 36, вход элемента ИЛИ 101 является входом 44 блока 36 S-вход и триггера 99 являются соответственно входами 45 и 46 блока 36, вход элемента ИЛИ 102 является входом 47 блока 36 вход элемента ИЛИ 102 соединен с R-входом D-триггера 98 и является входом 48 блока 34 в/од преобразователя 97 частоты является входом 49 блока 36.
Блок 50 управления формированием паковки (фиг. 5) содержит счетчик 4)3, выход которого является выходом 51 блока 50 счетчик 104, одновибрагор 105, входом сое диненный с выходом счетчика 104 логические элементы И 105 и 107 входами соединенные со входом счетчика 103 и г выходом одновибратора 105, являющимся выходом 52 блока 50 управленич формированием паковки, задатчик 108 количества слоев паковки, выходы которого соединены с соответствующими 5-входами в каждом разряде счетчика 103 задатчик 109 количества витков в слое паковки выходы которого соединены с соответствующими S-входами в каждом разряде счетчика 104, логический элемент ИЛИ 110 соединенный с входом задатчика 108 количества слоев паковки входом соединенный с выходом логического элемента И 106, выходом - с входом задатчика 109 количества витков в слое паковки, второй вход которого соединен с выходом логического элемента И 107, одновибратор 111, входом соединенный со входом логического элемента И 107, а выходом -- со входом задатчика 108 количества слоев паковки, логический элемент ИЛИ 112, выходом соединенный с R- входом счетчика 104, формирователь импульсов 113, входом соединенный со входом счетчика 104, причем вход задлтчика 108 количества слоев поковки является входом 53 блока 50 управления формированием паковки, R- входсчетчика 103 является входом54 блока,
вход логического элемента И 100 явчяетс входом 55 этого блока, А1 81 и С1 входы формирователя 113 импульсов являются соответственно входами 56, 57 и 58 этого бло
ка, вход логического элемента И 107 является входом 59 этого блока, а входы логического элемента ИЛИ 112 являются со ответственно входами 60 и 61 блока 50 уп равления формированием паковки
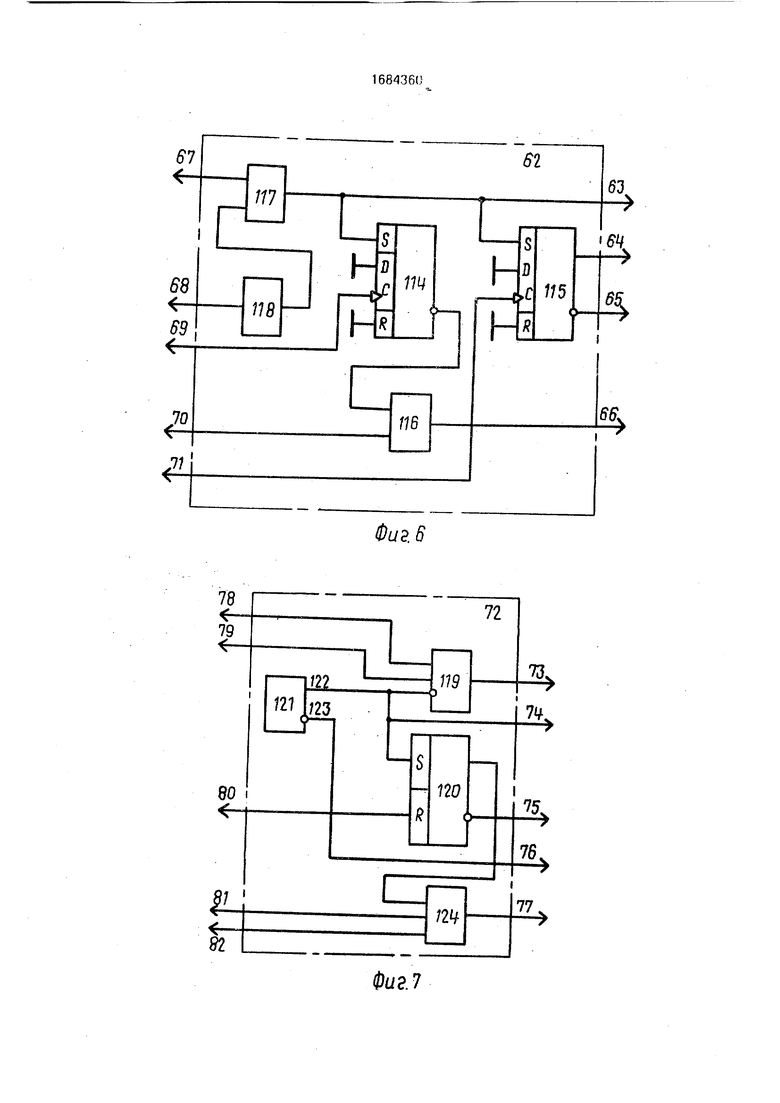
0Блок 62 управления сьемом паковки
(фиг 6) содержит D-триггеры 114 и 115 D и Н-входами соединенные с шиной заземлением источника питания системы управления, логически элемент И 1 16 вводом
5 соединенный с инверсным выходом D-три. гера И4, логический элемент И ПИ 117 и однорчОрзгор 1 18, причем выход J.OIHMTCKO го элемента ИЛИ 117 соединен с 7 входами D-триперов 114 и 115 и является вькодсм
0 53 блока 62 управления сьемом гмкспки прямой и ини-эроный выходы О-трипера 115 являются соответственно вы/одами 64 и 65 этою блока, выход логического элемента И 1 16 является выходом 66 этого блока вход
5 логического элемента ИЛИ 117 является чходом 67 этого блока вход одновибратора 118, вьоодом соединенного со входом логического элемента ИЛИ 117, является входом 68 этого блока, С-вход D-триггрра 1 14 явля0 ется БЛЮДОМ 69 этого блока вход погичегко- го элемента И 116 является входом 70 этого блока, С вход D-трипера 115 является вхо дом /1 ,тогэ блока
Блок 72 контроля положения ротора
5 (фиг 7) содержит логический элемент И 119, снабженный двумя прямыми и одним инвертирующим входами, RS-триггер 120. датчик 121 положения ротора, снабженный выходами 122 и 123, и логический элемент И 124,
0 входом соединенный с выходом RS-тригге- ра 120, причем выход элемента И 119 является выходом 73 блока контроля положения ротора, выход 122 датчика 121 положения рогора, соединенный с входом логического
5 элемрнта 119 И и S-входом RS-триггера 120, является выходом 74 этого блока выход RS- триггера 120 является выходом 75 этого блока, выход 123 датчика 121 положения ротора является выходом 76 этого блока выход ло0 гического элемента И 124 является выходом 77 это: о блока, вход элемента 119 И является входом 78 этого блока, вход элемента И 119 является входом 79 этого блока. R-вход RS-триггера 120 является входом 80 этого
5 блока, входы логического элемента И 124 являются соответственно входами 81 и 82 этого блока.
Датчик 121 положения ротора крепится к крышке корпуса 1 (фиг 1) при помощи кронштейна 125.
Блок 83 управления пуском и остановом гибкого автоматизированного прядильного модуля содержит одновибратор 126 (фиг. 8), вход которого соединен с источником питания системы управления, а выход является выходом 84 этого блока (выходом обнуления системы управления), одновибратор 127, вход которого через замыкающий контакт переключателя 128 Пуск соединен с источником питания системы управления и через резистор 129 - с шиной заземления этого источника, а выход является выходом 85 блока 83 управления пуском и остановом (выходом пуска модуля), логический элемент ИЛИ 130, первый вход которого через замыкающий контакт переключателя 131 СТОП соединен с источником питания системы управления и через резистор 132 - с шиной заземления этого источника, а выход является выходом 86 блока 83 (выходом останова прядильного модуля), логический элемент И 133, выходом соединенный со входом логического элемента ИЛИ 130. причем входы логического элемента И 133 являются соответственно входами 87 и 88 блока управления пуском и остановом.
Модуль работает следующим образом.
При подаче сжатого газа через штуцер 22 и каналы 21, а также через штуцер 24 и каналы 23 (фиг. 1) в рабочие зазоры приводной части модуля ротор 11 и ротор 15 всплывают в слое газовой смазки.
При включении напряжения импульс, вырабатываемый одновибратором 126 блока 83 управления пуском и остановом (фиг. 8), через выход 84 этого блока поступает на вход блока 25 управления вращательным движением (фиг. 3) и на R-вход D-триггера 92, устанавливая последний в нулевое состояние и блокируя самопроизвольное включение преобразователя 91 частоты и обмоток статора 4. Одновременно импульсы одновибратора 126 поступают на вход 48 блока 36 управления поступательным движением (фиг. 4) и на R-входы 98 и 99 D-триг- геров, устанавливая оба триггера в нулевое состояние. При этом нулевое состояние D- триггера 99 предопределяет чередование фаз А2, В2, С2 на выходе преобразователя 97 после его включения, обеспечивающее поступательное движение ротора 11 в сторону датчика 121 положения ротора (фиг. 1). Одновременно импульс одновибратора 126 поступает на вход 61 блока 50 управления формированием паковки (фиг. 5) и через логический элемент ИЛИ 112 на R-пход счетчика 104, устанавливая последний в нулевое состояние. Одновременно импульс одно- вибратора 126 поступает на вход 67 блока 62 управления съемом паковки (фиг 6) и
логический элемент ИЛИ 117 на S-вхо- ды 114 и 115 D-триггеров (устанавливающихся при этом в единичное состояние)-и на выход 63 этого блока, далее на вход 54 блока
50 управления формированием паковки и на R-вход счетчика 103, устанавливаемого при этом в нулевое состояние. Одновременно импульс одновибратора 126 поступает на вход 80 блока 72 контроля положения рото0 ра (фиг. 7) и на R-вход RS-триггера 120, устанавливая последний в нулевое состояние. При этом на выходе RS-триггерэ 120 появляется уровень логической 1, поступающий через выход 75 блока 72 на вход 44 блока 36
5 управления поступательным движением и через логический элемент ИЛИ 101 на вход преобразователя 97 частоты, включая последний. На силовых выходах этого преобразователя и на выходах 37, 33, 39 блока 36
0 появляется напряжение, поступающее на обмотку статора модуля, причем нулевое состояние D-триггера 99 предусматривает чередование фаз А2, В2. С2 на выходах 37, 38, 39 и блока 36 и в обмотке статора, обеспе5 чивающее поступательное движение ротора 11 в сторону датчика 12 1 положения ротора огда нижний край ротора 11 появляется в зоне датчика 121, последний срабатывает и на его выходе 122 появляется высокий уро0 пень напряжения ( уровень логической 1), поступающий на S-вход RS-триггера 120 и устанавливающий его в единичное состояние. При этом ротор 11 (фиг 1) и соединенный с ним шпиндель 12 с приемной
5 катушкой установлены в исходное состояние, уровень логической V с выхода D- триггера 92 через выход 29 блока 25 и с выхода D-триггера 9С через выход 40 блока 36 поступают на входы 81 и 82 блока 72
0 контроля положения ротора и на логический элемент 124, на вход которого поступает уровень логической 1 с выхода RS-триггера 120. Уровень логической 1 с выхода логического элемента И 124 через выход 77
5 блока 72 контроля положения ротора поступает через вход 35 блока 25 на вход преобразователя 91 частоты и через вход 49 блока 36 на вход преобразователя 97 частоты, определяя появление на фазных выходах обо0 их преобразователей постоянного напряжения, поступающего соответственно на обмотку 5 статора 4 (фиг. 1) и на обмотку статора, образованного плоскими катушками 9, удерживая в неподвижном состоянии
5 ротор 11, находящийся в исходном положении, и ротор 15.
После заправки нити при замыкании переключателя 128 Пуск (фиг. 8) на вход одновибратора 127 поступает высокий уровень напряжения, одновибратор 127 вырабатывает одиночный импульс, через выход 85 блока 83 управления пуском и остановом поступающий на вход 30 блока 25 управления вращательным движением (фиг. 3) и на S-вход D-триггера 92, переводя его в единичное состояние. При этом уровень логического О с выхода D-триггера 92 поступает (через выход 29 блока 25 и вход 81 блока 72) на вход логического элемента И 124 (фиг. 7), обуславливая уровень логического О на выходе последнего, на входе преобразователя 91 частоты и входе преобразователя 97 частоты, снимая постоянное напряжение с фазных выходов последних Одновременно одиночный импульс одно- вибратора 127 через вход 30 блока 25 поступает на R-вход сумматора 95, устанавливая сумматор 95 в нулевое состояние и обеспечивая максимальную частоту на выходе управляемого генератора 94, выходом соединенного со входом преобразователя 91 частоты, на вход которого поступает уровень логической 1 с выхода D-триггера 92. При этом на выходе преобразователя 91 частоты появляется переменное напряжение максимальной (в диапазоне регулирования этого преобразователя) частоты, поступающее на обмотку 5 статора и обеспечивающее вращение ротора 11 и соединенных с ним шпинделя 12 и приемной катушки 13, а также ротора 15 с максимальной частотой вращения. Вращение рогора 11 (а также шпинделя 12 и приемной паковки 14) обеспечивает намотку нити 18. проходящей через нитеводитель 17, соединенный рогулькой 16 с роторрм 15. Разница в частотах вращения ротора 11 (и соединенных с ним шпинделя 12 и приемной паковки 13) и ротора 15 (и соединенных с ним рогульки 16 и нитеводителя 17) обеспечивает одновременно с намоткой кручение нити 18.
Одиночный импульс одновибратора 127, поступающий на вход 30 блока 25 управления вращательным движением, одновременно поступает на вход 41 блока 36 управления поступательным движением и на S-вход D-триггера 98, устанавливая последний в единичное состояние. Уровень логической 1 с выхода D-триггера 98 поступает на вход преобразователя 97 частоты, обеспечивая его включение. При этом чередование фаз А2, В2, С2 на выходах преобразователя 97 (и на выходах 37, 38, 39 блока Зб),определяемое нулевым состоянием D-триггера 99, обеспечивает поступательное перемещение ротора 11 (фиг. 1) в сторону удаления от датчика 121 положения ротора и раскладку нити 18 на приемной паковке. Одновременно одиночный импульс одновибратора 127 с выхода 85 блока
83 поступает на вход 53 блока 50 управле ния формированием паковки (фи; 5), на первый входзадчтчика108,обеспечивая запись в счетчик 103 по его S-входам количества
слоев паковки, и через ло1И еский элемент ИЛИ 110 на вход задагчика 109 обеспечивая запись в счетчик 104 по его 5-входам количества витков в первом слое паковки Поскольку намотка нити 18 осуществляется
0 ротором 11, количество витков паковки (количество оборотов ротора 11) определяется количеством периодов сети, формируемой преобразователем 91 частоты, пыходы кото рого соединены с обмоткой 5 стя-чшз и со
5 входами 56, 57, 58 блока 50. являющимися входами формирователя импульсов 113 (фиг. 5), вырабатывающего один импульс за один период сети. Каждому обороту ротора 11 (каждому вигку паковки) соответствует
0 импульс на выходе формирователя 113. по ступающий нэ С-вход счетчика 104 и уменьшающий на единицу содержимое этого счетчика.
После выполнения запрограммирован5 ного задатчиком 109 количества витков содержимое счетчика 104 становится равным нулю, на выходе счетчика появляется сигнал, вызывающий прохождение одиночного импульса на выходе однсвибратора 105, по0 ступающего на С-вход счетчика 103 и уменьшающего на единицу содержимое этого счетчика. Одновременно импульс одновибратора 105 поступает на вход ложческого элемента И 106 (на втором входе которого
5 находится уровень логической 1. поступающий с выхода D-триггера 115 - с выхода 64 блока 62 управления съемом паковки) и через этот элемент и логический элемент ИЛИ 110 - на вход задатчика 103, чем обуславли0 вается запись в счетчик 104 следующего кода количества витков во втором слое паковки. Одновременно импульс одновибратора 105 через выход 52 блока 50 поступает на вход 46 блока 36 управления
5 поступательным движением и на С-вход D- триггера 99, включенного по счетному входу, переводя последний в единичное состояние и обеспечивая уровень логического О и уровень логической 1 на соот0 ветствующих входах преобразователя 97 частоты, чем обусловливается поступательное перемещение ротора 11 в сторону дат- чика 121. Одновременно импульс одновибратора 105 с выхода 52 блока 50
5 управления формированием паковки поступает на вход 34 блока 25 управления вращательным движением (фиг. 3) и на вход V сумматора 95, добавляя к содержимому сумматора числовой код толщины нити формируемый задатчиком 96. Увеличение числа на
выходе сумматора 95 вызывает снижение частоты на выходе генератора 94 и снижение частоты сети, формируемой преобразователем 91, чем обеспечивется постоянство линейной скорости приемки нити при увеличении диаметра паковки.
После выполнения количества витков, запрограммированного задатчиком 109 (фиг. 5) для второго слоя паковки, содержимое счетчика 104 снова становится равным нулю, на выходе счетчика 104 появляется сигнал, запускающий одновибратор 105 и обеспечивающий уменьшение на единицу содержимого счетчика 103, запись в счетчик
104информации из за датчика 109, соответствующей задаваемому количеству витков в следующем (третьем) слое паковки, перевод D-триггера 99 (фиг. 4) в нулевое состояние, предопределяющее чередование фаз на выходе преобразователя 97 частоты для перемещения ротора 11 в сторону удаления от датчика 121 начального положения ротора, а также добавление к содержимому сумматора числа, соответствующего толщине нити, аналогично описанному выше.
После выполнения количества витков, программируемого задатчиком 109 (фиг. 5), для последнего из числа программируемых задатчиком 108 при пуске слоев паковки ча выходе вычитающего счетчика 104 появляется сигнал, запускающий одновибратор 105, выходной импульс которого, уменьшая на единицу содержимое счетчика 103, переводит последний в нулевое состояние. Выходной сигнал счетчика 103 (через выход 51 блока 50 и вход 47 блока 36 управления поступательным движением) поступает на R-вход D-триггера 99 (фиг. 4) через логический элемент ИЛИ 102. D-триггер 99 уста навливается при этом в нулевое состояние, обеспечивая чередование фаз на выходе преобразователя 97 частоты, определяющее перемещение ротора 11 в сторону датчика 121. Одновременно выходной сигнал счетчика 103 поступает (через вход 71 блока 62) на С-вход D-триггера 115, переводя его в нулевое состояние. Уровень логической 1 с выхода D-триггера 115 поступает (через выход 65 блока 62) на вход механизма 90 отрезка нити, вызывая его срабатывание, а также (через вход 59 блока 50 управления формированием паковки) на вход логического элемента И 107, разрешая прохождение по его входу импульса одновибратора
105на входзадатчика 109 и запись в счетчик 104 максимального (по длине хода ротора 11) количества витков (оборотов ротора 11). Одновременно уровень логической 1 с выхода D-триггера 115 поступает на вход од новибратора 111, выходной импул ьс
которого, поступая на вход задатчика 108 и обеспечивая запись единиц в два младших разряда первого счетчика 103 и нулей во все остальные его разряды, программирует три
последовательных поступательных перемещения ротора 11.
Одновременно уровень логического О с выхода D-триггера 115 (через выход 64 блока 62 и вход 88 блока 83 управления
0 пуском и остановом) поступает на вход логического элемента И 133, блокируя прохождение сигнала датчика 89 обрыва нити (фиг. 2).
При достижении ротором 11 зоны дат5 чика 121 положения ротора на выходе 123 датчика 121 (фиг. 7) появляется импульс, поступающий через выход 76 блока 72, вход 66 блока 60 и логический элемент ИЛИ 112 на R-вход счетчика 104. что приводит к обнуле0 нию последнего независимо от количества оборотов ротора 11. появлению сигнала на выходе счетчика 104 и импульса на выходе одновибратора 105, уменьшающего на единицу содержимое сметчика 103, обеспечива5 ющего через логический элемент И 107 и вход задатчика 109 запись в счетчик 104 числа, соответствующего количеству оборотов ротора 11, приходящемуся на максимальную величину его поступательного
0 перемещения. Кроме того, импульс одно- вибратора 105 переводит в единичное состояние D-триггер 99, после чего ротор 11 движется поступательно в сторону удаления от датчика 121 положения ротора. После
5 совершения ротором 11 учитываемого счетчиком 104 (фиг 5) количества оборотов, приходящегося на максимальную величину поступательного перемещения, ротор 11 максимально удален от датчика 121 положе0 ния ротора (фиг. 1), паковка находится над сьемником, содержащим цилиндрическую пружину 19 и толкатель 30. При этом содержимое счетчика 105 становится равным нулю, выходной сигнал счетчика запускает
5 одновибратор 105, импульс которого уменьшает на единицу содержимое счетчика 103 и переводит в нулевое состояние D-триггер 99 (фиг. 4). Одновременно импульс одновибратора 105 через вход 78 блока 72 контроля
0 положения ротора поступает на вход элемента И 119, на вход которого поступает (через вход 79 блока 72, соединенный с выходом 65 блока 62 управления съемом паковки) уровень логической 1,
5 формируемый выходом D-триггера 115 (фиг 6), находящегося в нулевом состоянии. На вход элемента И119 при этом поступает уровень логического О с выхода 122 датчика 121 положения ротора (ротор 1 в этот момент максимально удален от датчика), что обеспечивает появление импульса на выходе элемента И 119, поступающего через выход 73 блока 72 и через вход 69 блока 62 управления съемом паковки на С- вход D-триггера 114 (устанавливающегося при этом в нулевое состояние), а также через вход 32 блока 25 управления вращательным движением и через логический элемент ИЛИ 93 на С-вход D-триггера 92 и переводящего последний в нулевое состояние. Обусловленный нулевым состоянием D- триггера 92 уровень логического О с его выхода поступает на вход преобразователя 91 частоты, что приводит к выключению последнего, обесточиванию обмотки 5 статора и отключению вращения ротора 11 и ротора 15. При этом на съемник 20 перестает действовать центробежная сила, под действием пружины 19 сьемник20 выталкивается из корпуса рогульки 16 и при последующем поступательном перемещении ротора 11 в сторону датчика 121 положения ротора, обусловленном нулевым состоянием D- триггера 99 и соответствующим чередованием фаз на выходе преобразователя 97 частоты, обеспечивает съем готовой паков ки 14.
При достижении ротором 11 зоны датчика 121 положения ротора на выходе 123 датчика 121 (фиг. 7) появляется импульс через выход 76 блока 72 контроля положения ротора, через вход 70 блока 62 управления съемом паковки, через логический элемент И 116 (на первый вход которого поступает уровень логической 1 с выхода D-триггера 114), через выход 66 блока 62, через вход 42 блока 36 управления поступательным движением (фиг. 4) и через логический элемент ИЛИ 100, поступающий на С-вход D-триггера 98 и переводящий его в нулевое состояние. При этом уровень логического О с выхода D-триггера 98 через логический элемент ИЛИ 101 поступает на вход преобразователя 97 частоты, выключая последний и отключая поступательное перемещение ротора 11. Одновременно (аналогично описанному выше) уровень логической 1 на выходе логического элемента И 124, поступая на вход 91 и вход 97 преобразователей частоты, обусловливает появление на их выходах постоянного напряжения, фиксируя исходное положение ротора 11. Одновременно уровень логической 1 с выхода D- триггера 98 через выход 40 блока 36 и через вход 68 блока 62 управления съемом паковки запускает одновибратор 118 (фиг. 6), импульс которого через логический элемент ИЛИ 117 поступает на S-входы 114 и 115 D-триггеров, устанавливая их в единичное состояние и (через выход 63 блока 62, соединенный с входом 54 блока 50 управления формированием паковки) на R-вход счетчи ка 10q-, устанавливая его в нулевое состояние, после чего модупь подготовлен к
следующему рабочему циклу.
При обрыве нити в процессе наработки паковки на выходе датчика 89 обрыва нити (фиг. 2) появляется уровень логической 1, поступающий через вход 87 блока 83 управ0 ления пуском и остановом (фиг. 8) на вход логического элемента И 133. на вход которого (через вход 88 блока 83. соединенный с выходом 64 блока 62 управления съемом паковки) поступает уровень логической 1
5 формируемый выходом D-трипзрл 115,фиг. 6). Выходной сигнал логического элемента И 133 через логический элемент ИЛИ 130 и через выход 86 блока 83 поступает (через вход 31 блока 25 управления вращательным
0 движением и через логический элемент ИЛИ 93) на С-вход D-триггера 92 (фиг. 3) отключая (аналогично описанному выше) вращение ротора 11 с паковкой 14 и ротора 15. Одновременно сигнал с выходя 86 блока
5 83 управления пуском и остановом поступает на вход 43 блока 36 управления поступательным движением и через эпемент ИЛИ 109 (фиг. 4) на С-вход D-триггера 98. отключая (аналогично описанному выше) поступа0 тельное перемещение ротора 11 с паковкой 14.
При необходимости экстренного останова замыканием переключателя 131 Сгоп (фиг 8) формируется уровень логиче5 ской 1 на выходе логического элемента ИЛИ 130 и на выходе 86 блока 83 управления пуском и остановом, обеспечивающий останов ротора 11 с паковкой 14 и ротора 15 аналогично описанному выше случаю обры0 ва нити.
Формула изобретения 1. Автоматизированный прядильный модуль, содержащий шпиндель с держателем пакооки, кинематически связанный с
5 ротором с газомагнитной опорой и вертикальной осью вращения и охваченный era- тором, установленным в цилиндрическом корпусе, снабженном амортизатором, и систему управления, силовым электрическим
0 выходом связанную со статором, отличающийся тем, что, с целью расширения функциональных возможностей путем совмещения операций намотки, раскладки и кручения нити, он имеет датчик обрыва и
5 механизм обрезки нити и дополнительнее ротор и статор, последний из которьх выполнен в виде усеченного конуса, установленного на верхнем торце корпуса, и охватывает ротор, дополнительный ротор выполнен в виде нитераскладчика с. гдзомагнитной опорой и охватывает дополни тельный статор, а статор выполнен в виде набора чередующихся ферромагнитных шайб и кольцевых катушек причем вход и выход системы управления соответственно связаны с датчиком обрыва и механизмом обрезки нити, а дополнительный силовой вход соединен с дополнительным статором, причем длина ротора превышает суммарную длину обоих статоров на длину паковки
2Прядильный модуль по п 1 отлича ю щ и и с я тем что дополнител мый ротоо снабжен съемником паковки
3Прядильный модуль по п I оглича ю щ и и с я тем что система управления имеет блок контроля положения pi гора и блоки управгения пуском и пм по ступательным и ьрзщ, елкнымдп сниями ротора формированием и съемом nai овки причем первый ьыход блока упрг пленил гу сксм и остановом рогора свячен г юр-.п Ч входами блоки контроля полож( in f i -чо а и блоков ./ГФЛСЫРНИЯ враиыт и гп сгупатрл 1 им дв х°ииями )г) 41 Л МИ
рОВДНИГ М i,1 СЪСМ JM ПС1КОВКИ РТОрПЧВ 1ХОД
с вторы и входа. 1и блоков упрг1ВЛ1- -ч/и вра ща(,нь1м и поступательным движениями ротора и формированием ПРЮ ш выход с т,ст ими Вчодами блогтв /лрчв- ленил вращагепмп м и пппуг дриженп inn роюра первым вход
ВХОДОМ ИС СПЫ yipcT1 U Иа . лСГ f
упраьленч0 piiu IT льным м ро гора связан i итооым влпдом бло t кочтро л ч полпчгния pciop i ,1 его ( или воч с сиговом п«о,юм г)Л(ка форчировтния РЧ ковчи и яичяе гсч дочм inn ельным силоньи i выходом системы /nnai 1вния первый мл ход блоча контроля попоженич роторт свя зан с четвертым входом бпокз управления вращательным движением ротора и вторым входом блока управления съемом паковки второй и трет ии сьмоди соответственно с четвертым и пятмм в одами блока упраяле ния поступательным движением ротор четвертый выход cipCTsiiMt входами Сло ков управления съемом и формир аанием паковки а пятый пыход с пятым и LHPCTVM входами COOTBGI LT ьенпи блоков упргилл ия вращат е/|Ьным и , гпте н чнм ;ии к°нч ями ротора, первый вгуод Ото1 i ynp нле- ния формированием паковки ссе if-ч с четвертым и седьмым входами с Пьегст вено блоков управления съемом эКОВКИ И ПОСТупЧТеЛЬНО О Д1)
ротора, а второй восьмым шестым и третьим р одами соотзетстррнио бтгков управтечия гоступ лея ным и ппащятель- ным дсиженич иц рокоча и блш ,. юшрпля
, (,-( v -.И Т 1 I FH HI о1Т Т У Г
рэвления съемом паковки связан с четвертым блока управления формированием паковки второй выход с вторым и пятым вводами соответственно блоков управления
пуском и остановом и формированием па кзвки третий выход с девятым входом блока управления поступательным движением ротора, а четвертый выход с шестым входом блока формирования паковки и чет
0 вертым входом блока контроля положением ротора и одновременно является вькодом системы управ |рния выход блока управле ния поступательным движением ротора со единен г пятыми входами бпока управления
5 съемом паковки и блока контроля положе ния ротора а ею силовой выход является силовым выходом СИГГРМЫ упранмения
4 Прядильный модуль по пп 1 и 3 о т ли чающийся тем что Плок управления
0 Еращател ным движением ротора соде ржи г иасгогно управ .ПРМЫИ препбртзовнтель ча скяы упрарля мыи 1енрратор мгтогы за ДЯР- ИК толщины ни.и сумматор D триггер и огичегкии элемент 11Л1/ причем Р вход li триг(ррс1 нпляегся пе( BUM BXJ/IOM блоке)
Hiien
S пгцрдинен с СТЭНОРСЧ
шм ходом гумгт ора и является вторым , D соединен i 1иинои 1аземлег 11« а С вход связан с вы
O ч одом Л0( ического эпемента ИЛИ входь: ко яв 1яю ч,я третьим и четвертым 1х.|даг1 блолл ,ги твпения инверсный вы од григ rpd п. я выходов блока управ ления а Г|ряг1ои в од связан с первым 5 входом i реобг)гповагргп частоты второй пчид ) сс Д11чен L генера ора 1,i юты третии вход является пятым ходом блока управления а выход сило Ь1м выходом блонч управления при этом
0 тервыи счетный сумматора связан с зычодом задатчика толщины нити инфор млционнми вход ЯВПЯРТГЯ шесть1м входом 1лпка управления а выход соединен с его вторым счетным входом и входом генерато
ci рт частоты
5 Прядильный модуль по пп 1 и 3 О т л и ч а ю щ и и с я тьм что блок управления покупательным пеоемрщением ротора со держит реверсивный преобразователь час
0 тоты D три гери и логические элементы ИЛИ причем S вход первого триггера явля ет я втирым входом блока управления D вход соединен и ииинои заземления С-вход связан с выходом первого логического зле
Ь мента И ПИ входы «.оторого являются треть им и девятым блока управления R-БХОД объединен с первым входом второго логического элемента ИЛИ и является пер вым входом блока управления инверсньш вых 5д пррвого тоиггера является выходом
блока управления, а прямой выход соединен с первым входом третьего логическою элемента ИЛИ, второй вход которого является пятим входом блока управления, а выход ев, оЭн первым входом преобразователя частоты, выход которого является силовым выходом блока управления, при этом S-вход второго триггера являе с-э четвертым входом блока управление, С-вход - восьмым входом R-эход соединен с выходом второго логического элемента ИЛИ, второй вход которого является седьмым входом блока управления, инверсный выход второго триггера соединен с его О-пходом и вторым входом преобразоеате эстеты третий вход которого связан i, прямым вч ходом триггера а четвер ый вход яв шестым входом t-лока упраплемия
6. Прядильный модуль по пп 1 и 3 отличающийся тем 1чо блок управления формированием паковки содепжи г счетчики одновибраторы. задатчики количества БИТКОВ в слое и количества слоен в паковке формирователь импульсов и логические .элементы И и ИЛИ при этом установочный вход первого счетчика спязан с выходом зч- датчика количесiиз слоев в паковке первый вход которого объединен с первым входом первого логического элемента ИЛИ и вля ется вторым входом блокя упраопения, - второй вход связан с выходом первого од новибратора вход которого объединен с первым входом первого логического элемента И и является шестым входом блока управления, вход сброса первого счетчика является четвертым входом блок упрапле ния, счетный вход связан с выходом второго одновибратора являющимся вторым выло дом блока управления и соединен с вторым и первым входами соответственно первою и второго логических элементов И а выход первого счетчика является первым выходом блока управления, вход сброса второго счетчика соединен с выходом второго логи- ческого элемента ИЛИ, входы которого являются первым и третьим входами блока управления, счетный вход г/горого счетчика связан с выходом формирователя импульсов, входы которого являются силовым входом блока управления, второй вход второго логического элемента И является пятым входом блока управления, а его выход соединен с вторым входом второго логического элемента ИЛИ, выход которого связан с первым входом задатчика количества витков в слое паковки, второй вход которого соединен с выходом первого логического элемента И, а выход - с установочными входами второго счетчика, выход которого связан с входом второго одновибратора.
. рЯДИ,1ЬНЬ Й МОДУЛЬ ПО ПП. 1 I 3. О 1 .1 и ч -I ю щ и и с я тем . упг-тплгнис съем ..ч паковки епдер .и ) триггеры, д- новибратор и логические элементы И и ИЛИ, причем первый вход логическою эле мента И ПИ являемся первым вводом блока управления, а его выход соединен г дами nepFicro и второго григгероп и являет ся первым выходом управления
0 пыход одновибратора связан с вторым входом погического элемента И ПИ, и его вход шляется пятым входом Ьлска уи чтления О- л R-мход;- тпиггепов со ( с ашной ЗЛЗРМЛС 1 ия, пьрио о триггера явля5 етс-: вторым входом Ьлока улог сгенич инверсный выход первого ipnrrr-pa спязан с первым входом тогичагкою элемент И агорой вход котоогго вляе 1 ч оетыи вхг- дом блока упповления, з третыь
0 его выходом С-вход лторо;о трш гера лоля- CICP четвертым входом Плокч употвл ния .) поямой и инверсный вькод-i вюрого юра являются соотпетствучно зтооыги и четвертым выходйми блска viip. m/ eHnq
58 Прядильный -оду 1 по пп 1 и 3 о т л
и чающийся тем, что f лок контроля положения ротооа содержит RS-триг.ер датчи/ положения ротооя и логические о те менты И, причем перьыи и второй прямые
0 входы первого логического элемента И являются третьим и четвертым входами блог i контроля, з выход первого логического эл( мента И явлрется первым вькодом блока контроля, потенциальный выхсддатчика по5 ложения рогора связан с инверсным входом первого логического э/.емента И и S-входом триггера и одновременно является вторым выходом бпока контроля четвертым выходом которого является импульсный выход
0 датчика положения ротора. R-аход триггера является первым входом блока контроля третьим выходом которого является инверсный выход триггера прямой выход которого связан с первым входом второго
5 логического элемента И, второй, третий входы и выход которого являются соответственно вторым пятым входом и пягым выходом блока контроля.
9. Прядильный модуль по пл 1 и 3, о т л и0 чающийся тем, что блок управления пуском и остановом ротора содержи одно- вибраторы, переключатели, резисторы и логические элементы И и ИЛИ, причем выход первого одновибратора является перпым
5 выходсм блока управления, второй которого является выходом вторэго . - вибратора, вход которого связан с выходом первого переключателя и через первый резистор - с шиной заземления, входами ло гического элемента И являются пераый и
второй входы блока управления, а выход логического элемента И связан с первым входом логического элемента ИЛИ, второй вход которого соединен с выходом второго переключателя и через второй резистор - с
18
шиной заземления а выход является третьим выходом блока управления, причем входы первого одновибратора, первого и второго переключателей соединены с источником питания
14
Фиг.1
Фиг.Ь
9 гпф
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМОНАМАТЫВАЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022900C1 |
| Линейный электропривод возвратно-поступательного движения | 1987 |
|
SU1598098A1 |
| Привод бобинодержателя | 1988 |
|
SU1664903A1 |
| Цифровой фазометр для определения фазы дисбаланса ротора | 1990 |
|
SU1793389A1 |
| Цифровой измеритель частоты вращения | 1989 |
|
SU1697009A1 |
| Устройство для управления многофазным двигателем возвратно-поступательного движения | 1986 |
|
SU1417158A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU1020954A1 |
| Вентильный электропривод | 1987 |
|
SU1601725A1 |
| Устройство для самонастраивающейся токовой защиты электродвигателя | 1986 |
|
SU1339735A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |


uyt.t Hyi
/J/T Стоп
,54
cpue.ff
| Электроверетено прядильной машины | 1986 |
|
SU1392155A1 |
