равления через электромагнитный клапан 14, подключенный к выходу переключающего блока 16, к входу которого через пороговый элемент 18 подключен элемент 19 измерения давления в камерах, и пульт 24 управления, содержащий задатчик 20 режимов работы и датчики угла 30 и угловой скорости 25 отклонения судна от курса. Устройство снабжено двумя формирователями 26, 29 модуля, делителем 28 напряжения, компаратором 27 и логическими элементами И 17 23, ИЛИ 22. НЕ 21. При этом датчик 25 угловой скорости отклонения судна от курса через формирователь 26 модуля подключен к входу компаратора 27, к
другому входу которого через последовательно соединенные делитель 28 напряжения и второй формирователь 29 модуля подключен датчик 30 угла отклонения судна от курса, а выход компаратора 27 через последовательно соединенные элемент И 17. ИЛИ 22 и второй элемент И 23 подключен к входу переключающего блока 16, причем второй вход второго элемента И 23 соединен с выходом задатчика 20 режимов работы, который через элемент НЕ 21 соединен с вторым входом элемента ИЛИ 22, а второй вход первого элемента И 17 соединен с выходом порогового устройства. 1 з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая рулевая машина | 1985 |
|
SU1261840A1 |
| Устройство для управления электрогидравлической многокамерной рулевой машиной | 1983 |
|
SU1123938A1 |
| Электрогидравлическая рулевая машина | 1984 |
|
SU1207902A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1123939A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041418A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119929A1 |
| Электрогидравлическая рулевая машина | 1985 |
|
SU1276566A1 |
| Электрогидравлическая рулевая машина | 1985 |
|
SU1294696A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
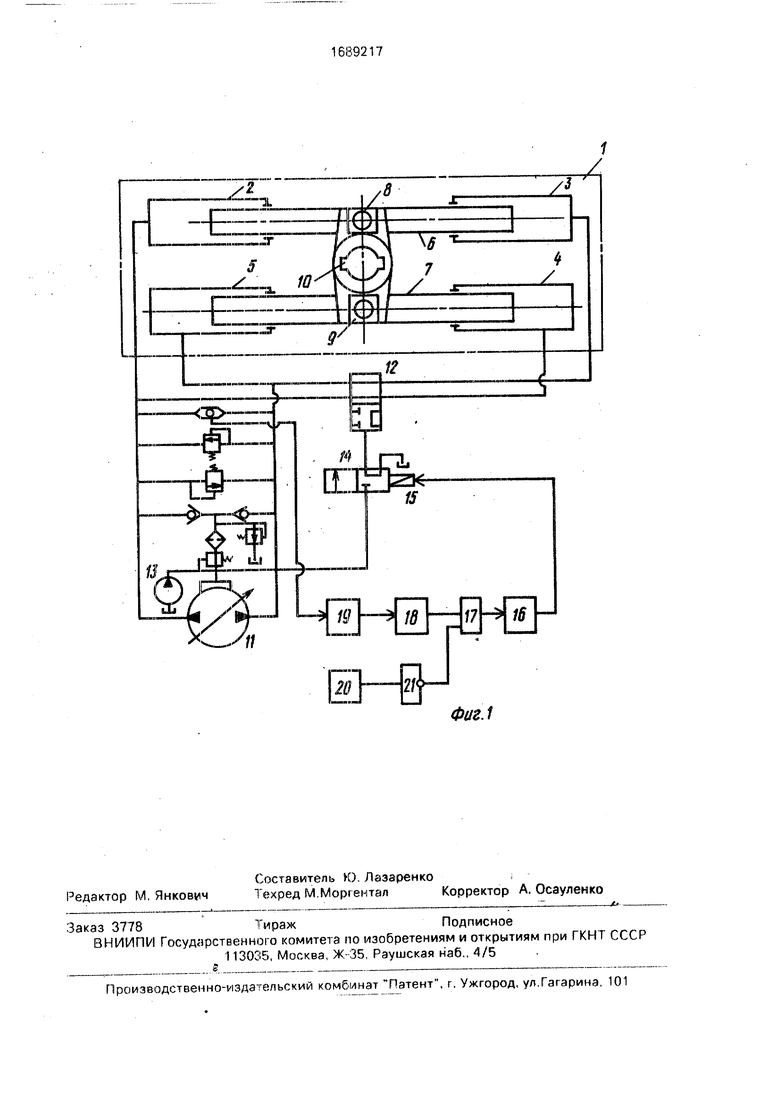
Изобретение относится к судостроению, конкретно к устройствам управления судовыми рулевыми машинами. Цель изобретения - повышение эффективности эксплуатации электрогидравлической рулевой машины. Устройство для управления многокамерной электрогидравлической рулевой машиной содержит клапан 12 кольцевания камер, гидравлически связанный с насосом 13 упв (Л о 00 ю ю Рш.2
Изобретение относится к судостроению и может быть использовано для управления судовыми электрогидравличес кими рулевыми машинами.
Целью изобретения является повыше- ние эффективности эксплуатации рулевой машины.
На фиг. 1 приведена принципиальная схема устройства для управления электрогидравлической рулевой машиной; на фиг. 2 - то же, вариант.
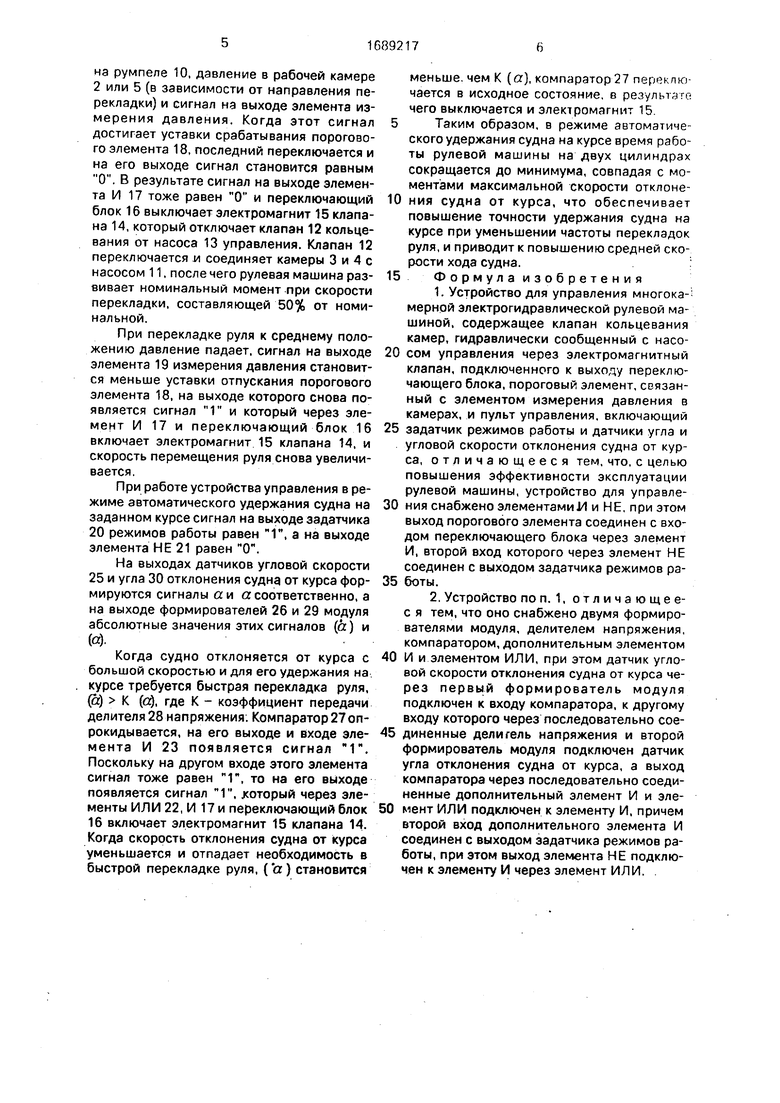
Электрогидравлическая рулевая машина содержит силовой исполнительный привод 1 многокамерной конструкции, включающий .в себя цилиндровые камеры 2-5, в которых размещены плунжеры f. и 7, соединенные через шарниры 8 и 9 с румпелем 10, при этом цилиндровые камеры 2 и 5 соединены с насосом 11 переменной производительности непосредственно, а камеры 3 и 4 - через клапан 12 кольцевания, полость управления которого гидравлически соединена с насосом 13 управления через электромагнитный клапан 14, электромагнит 15 которого подключен к выходу пере- ключающего блока 16, к входу которого через последовательно соединенный элемент И 17 и пороговый элемент 18 подключен элемент 19 измерения давления в камерах, а выход задатчика 20 режимов работы, уста- новленного в пульте управления, через элемент НЕ 21 соединен с вторым входом элемента И 17.
Во втором варианте электрогидравлическая рулевая машина дополнительно со- держит элемент ИЛИ 22 и второй элемент И 23. Второй вход элемента ИЛИ 22 через элемент НЕ 2J подключен к входу элемента И 23 и к выходу задатчика 20 режимов работы, установленного в пульте 24 управления вместе с датчиком 25 угловой скорости отклонения судна от заданного курса, выход которого через первый Формирователь 26 модуля соединен с неинвертирующим входом компаратора 27, инвертирующий вход которого через последовательно соединенные делитель 28 напряжения и второй формирователь 29 модуля подключен к выходу датчика 30 угла отклонения судна от заданного курса.
При этом выход элемента ИЛИ 22 связан с первым элементом И 17, а второй вход второго элемента И 23 связан с задатчиком 20 режимов работы.
Устройство работает следующим образом.
При работе рулевой машины в следящем режиме, в котором перемещения руля повторяют перемещения штурвала, сигнал на выходе задатчика 20 режимов работы равен О, а на выходе элемента НЕ 21 и выходе элемента ИЛИ 22 равен 1. Когда руль находится в среднем положении, давление в цилиндровых камерах 2-5 мало и сигнал на выходе элемента 19 измерения давления ниже уставки срабатывания порогового элемента 18, с выхода которого сигнал Г поступает на вход элемента И 17. Поскольку на обоих входах элемента И 17 имеется сигнал 1, то на его выходе появляется сигнал Г. который через переключающий блок 16 включает электромагнит 15 клапана 14, который переключается и соединяет насос 13 управления с полостью управления клапана 12 кольцевания, который переключается и отключает от насоса 11 цилиндровые камеры 3 и 4, со единяя их между собой.
В результате машина развивает 50% номинального момента при максимальной скорости перекладки. При перекладке руля к борту возрастают момент сопротивления
на румпеле 10. давление в рабочей камере 2 или 5 (в зависимости от направления перекладки) и сигнал на выходе элемента измерения давления. Когда этот сигнал достигает уставки срабатывания порогового элемента 18. последний переключается и на его выходе сигнал становится равным О. В результате сигнал на выходе элемента И 17 тоже равен О и переключающий блок 16 выключает электромагнит 15 клапана 14, который отключает клапан 12 кольцевания от насоса 13 управления. Клапан 12 переключается и соединяет камеры 3 и 4 с насосом 11, после чего рулевая машина развивает номинальный момент при скорости перекладки, составляющей 50% от номинальной.
При перекладке руля к среднему положению давление падает, сигнал на выходе элемента 19 измерения давления становится меньше уставки отпускания порогового элемента 18, на выходе которого снова появляется сигнал 1 и который через элемент И 17 и переключающий блок 16 включает электромагнит 15 клапана 14, и скорость перемещения руля снова увеличивается.
При работе устройства управления в режиме автоматического удержания судна на заданном курсе сигнал на выходе задатчика 20 режимов работы равен Г, а на выходе элемента НЕ 21 равен О.
На выходах датчиков угловой скорости 25 и угла 30 отклонения судна от курса формируются сигналы аи а соответственно, a на выходе формирователей 26 и 29 модуля абсолютные значения этих сигналов (а) и
(о).
Когда судно отклоняется от курса с большой скоростью и для его удержания на курсе требуется быстрая перекладка руля, (а) К (а), где К - коэффициент передачи делителя 28 напряжения. Компаратор 27опрокидывается, на его выходе и входе элемента И 23 появляется сигнал 1. Поскольку на другом входе этого элемента сигнал тоже равен 1, то на его выходе появляется сигнал 1, .который через элементы ИЛИ 22, И 17 и переключающий блок 16 включает электромагнит 15 клапана 14. Когда скорость отклонения судна от курса уменьшается и отпадает необходимость в быстрой перекладке руля, (а) становится
меньше, чем К (а), компаратор 27 перш лю чается в исходное состояние, в редулм.чгс чего выключается и электромагнит 15
Таким образом, в режиме автоматиче
ского удержания судна на курсе время работы рулевой машины на двух цилиндрах сокращается до минимума, совпадая с моментами максимальной скорости отклонения судна от курса, что обеспечивает повышение точности удержания судна на курсе при уменьшении частоты перекладок руля, и приводит к повышению средней скорости хода судна.
Формула изобретения
задатчик режимов работы и датчики угла и угловой скорости отклонения судна от курса, отличающееся тем, что, с целью повышения эффективности эксплуатации рулевой машины, устройство для управления снабжено элементами 1/1 и НЕ. при этом выход порогового элемента соединен с входом переключающего блока через элемент И, второй вход которого через элемент НЕ соединен с выходом задатчика режимов работы.
И и элементом ИЛИ, при этом датчик угловой скорости отклонения судна от курса через первый формирователь модуля подключен к входу компаратора, к другому входу которого через последовательно соединенные делитель напряжения и второй формирователь модуля подключен датчик угла отклонения судна от курса, а выход компаратора через последовательно соединенные дополнительный элемент И и элемент ИЛИ подключен к элементу И, причем второй вход дополнительного элемента И соединен с выходом задатчика режимов работы, при этом выход элемента НЕ подключен к элементу И через элемент ИЛИ.
Фиг.1
| Устройство для управления электрогидравлической многокамерной рулевой машиной | 1983 |
|
SU1123938A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
