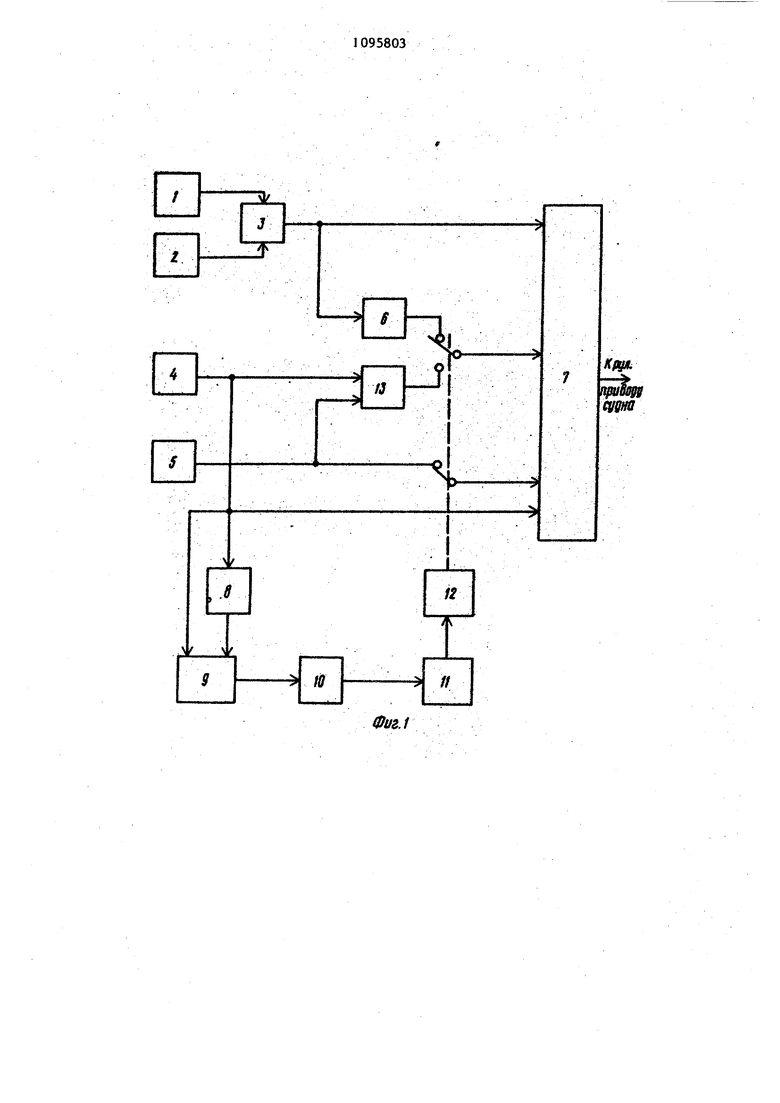
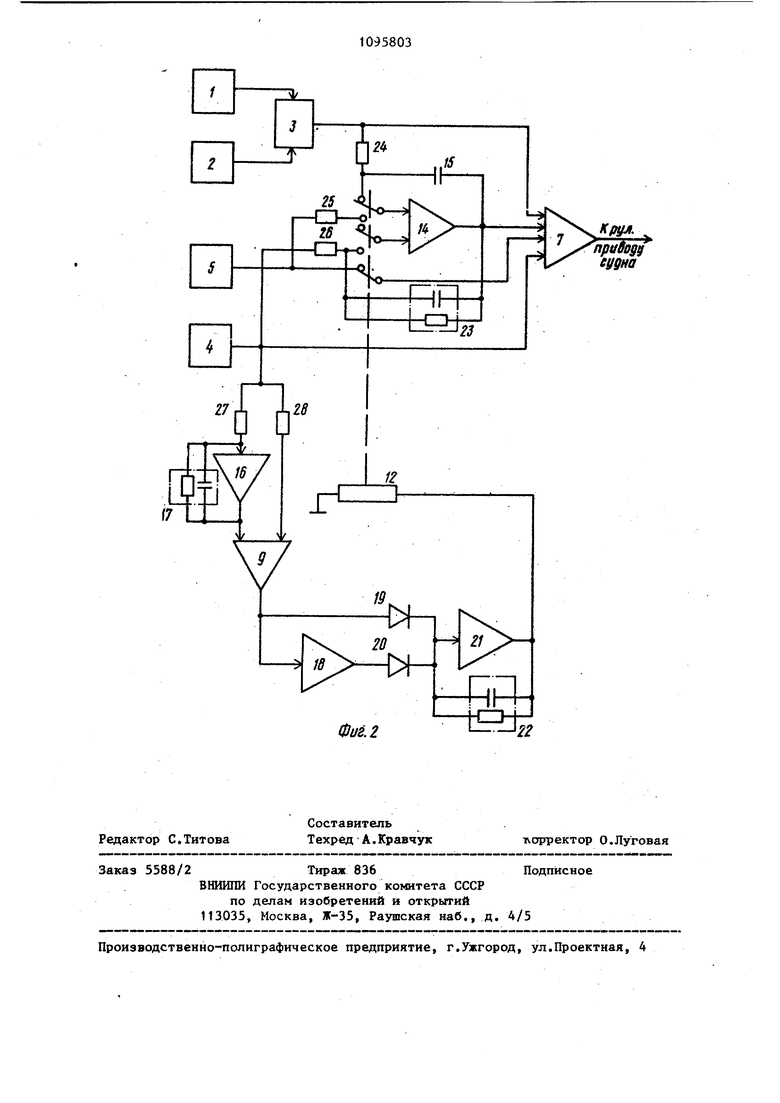
Изобретение относится к области автоматического управления подвиж ными объектами, в частности к облас ти автоматического судовождения. Известны авторулевые, в которых для автоматического управления используются датчик угловой скорости судна, датчик рассогласования по курсу и датчик угла перекладки руля. Такие авторулевые эффективны при спокойном море, а при ухудшении погоды авторулевые обычно отключают и переходят на ручное управление, так как наличие сигнала угловой скорости судна в законе управления авторулевого приводит (из-за наличи помех) к недопустимой перегрузке рулевого привода, создающей аварийную ситуацию (заклинку баллера руля вследствие перегрева исполнительног механизма рулевого привода). Наиболее близким к изобретению техническим решением является авторулевой типа Аист. D него для улучшения управления введен в канал управления интегратор курса. Однако использование такого авторулевого при спокойном море приввДет к ухудшению точности стабилизации на курс а при сильном морском волнении нали чие интегратора может привести к потере устойчивости судна на курсе. Кроме того, использование сигнала угловой скорости судна во время мор кого волнения приводит к появлению помех в канале управления, что значительно снижает качество управлени судном на курсе. Цель изобретения - повышение точ ности авторулевого за счет улучшени его эксплуатационных характеристик. Поставленная цель достигается тем, что в авторулевой, содержащий датчик и задатчик курса, выходами подключенные к соответствующим входам блока рассогласования, выход которого соединен с первым входом сумматора и с входом интегратора. датчик угловой скорости судна и дат чик угла перекладки руля, связанный выходом с вторым входом сумматора, введены последовательно соединенные блок выделения среднего значения, компаратор, блок вьщеления модуля, блок формирования оценки нагрузки рулевого привода, исполнительное реле и модель угловой скорости судна, причем выход интегратора и выход модели угловой скорости судна через перекидной контакт исполнительного реле подключены к третьему входу сумматора, .выход датчика угловой скорости судна соединен с первым входом модели угловой скорости судна и через размыкающий контакт исполнительного реле - с четвертым входом сумматора, выход датчика угла перекладки руля подключен к второму входу модели угловой скорости судна, к входу блока вьщеления среднего значения и к второму входу компаратора. В авторулевом определяется нагрузка рулевого привода и в случае сильной загрузки рулевого привода, т.е. развитого морского волнения, происходят отключение интегратора от канала управления и переключение сигна ла угловой скорости судна на сигнал оценки сигнала угловой скорости, полученной с помощью модели угловой скорости судна. Это облегчает работ рулевого привода, и авторулевой используется фактически при любых погодных условиях. На фиг. 1 представлена функциональная схема авторулевого; на фиг. 2 - вариант схемы авторулевого. Авторулевойсодержит датчик курса 1, задатчик курса 2, блок рассогласования 3, датчик 4 угла перекладки руля, датчик 5 угловой скорости судна, интегратор 6, сумматор 7, выполненный в виде усилителя постоянного тока, блок 8 вьщеления среднего значения, компаратор 9, выполненный в виде усилителя постоянного тока, блок 10 выделения модуля, блок 11 формирования оценки нагрузки рулевого привода, исполнительное реле 12, модель 13 угловой скорости судна. Интегратор 6 вьшолнен в виде ycHnHfeля 14 постсГянногр тока и конденсатора 15. Блок 8 выделения среднего значения выполнен в виде усилителя 16 постоянного тока и RC-цепочки 17. Блок 10 вьделения модуля выполиен в виде усилителя 18 постоянного тока и двух диодов 19 и 20. Блок 11 форг-ирования оценки нагрузки рулевого привода выполнен в виде усилителя 21 постоянного тока и RC-цепочки 22. Модель 14 угловой скорости судна выполнена из усилителя 14 постоянного тока и RC-цепочки 23. Резисторы 24-28 являются входнивет сопрозивлёниями усилителей постоянного тока. Авторулевой работает следующим образом. При спокойном море.в авторулевом формируется закон управления с использованием сигналов угловой скорос ти судна и интеграла по рассогла- сованию курса --К,-( . (Я где К. - коэффициенты регулирования ; - сигнал курса; - заданный сигнал курса; Ч - сигнал угловой скорости судна; -сигнал угла перекладки руля; -сигнал производной угла перекладки руля. При усилении волнения на море в блоке 1t формирования оценки нагруз ки рулевого привода вырабатьгаается сигнал большой нагрузки рулевого привода. С помощью блока 8 выделения среднего значения определяем средие-эксплуатационное положение руля (т.е. его балансировочное значение j которое зависит от параметро судна, его скорости, загрузки, иден тичности мощности винтов и т.д.). В ксшпараторе 9 определяется значение положения руля относительно его б ансировочного значения (S - 6 ). Сигнал с компаратора 9 поступает на блок 10 для формирования модуля этой величины. Модуль от сигнала отклонения руля (относительно балан сировочнагр значения) поступает на вход блока 11 формирования оценки нагрузки рулевого привода, который даст команду на исполнительное реле 12 о переключении его контактов.в другое положение. В этом случае закон управления рулевым приводом изменится и будет иметь вид , (v-vfj a) . (2 где N - оценка сигнала угловой скорости судна; К К, полученной в (1). Оценка сигнала угловой скорости судна формируется в модели угловой скорости судна, состоящей из усилителя 14 постоянного тока с КС-цепоч кой 23 в цепи его обратной связи. На первый вход модели угловой скорости судна (т-, е. на инвертирующий вход усилителя 14 постоянного тока): приходит сигнал с датчика угловой скорости судна. На второй вход модели угловой скорости судна (т.е. на неинвертирующий вход усилителя 14 постоянного тока) приходит сигнал с датчика угла перекладки руля. Сигнал невязки () приводит к ослаблению смещения сигнала оценки угловой скорости судна. Средне-эксплуатационное положение руля, а также нагрузка рулевого привода определяются с помощью тяжелых фильтров (т.е. фильтров W,p ---т с большими постоянными Т), которые отфильтровывают высокочастотные составляющие и ввде-. ляют инфранизкочастотные составляющие. Такие фильтры в авторулевом реализованы с помощью усилителя 16 и RC-цепочки 17, усилителя 21 и RCцепочки 22. Введение перестройки позволяет применить фильтр в сигнале оценки угловой скорости судна с требуемой величиной сглаживания даже для неустойчивых на кзфсе судов, так как при налич,ии внешнего возмущения использование фильтра не приводит к потере устойчивости системы. , Использование данного авторулевого для морских судов позволит не только повысить качество стабилизации судна на курсе, но и получить существенный экономический эффект. Экономический эффект определяется как сокращением энергетических расходов на преодоление лобового сопротивления судна путем уменьшения амплитуды рыскания судна на курсе, так и сокращением расхода рабочего тела рулевых приводов, и значительным увеличением срока их службы. . Это позволяет увеличить возможность спрямления пути судна шш увеличить среднюю скорость его движения. Как показали исследования, уменьшение амплитуды рыскания судна на курсе на 1,5-2° позволяет увеличить среднюю скорость движения на 1,5%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Авторулевой | 1987 |
|
SU1529181A1 |
| Авторулевой | 1983 |
|
SU1183944A2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| Авторулевой | 1975 |
|
SU540258A1 |
АВТОРУЛЕВОЙ, содержащий датчик и эадатчик курса, выходами подкточенные к соответствующим входам блока рассогласования, выход которого соединен с первым входом сумматора и с входом интегратюра, . датчик угловой скорости судна и датчик угла перекладки руля, связанный выходом с вторым входом сумматора, отлич ающийся тем, что, с целью повьшения точности авторулевого за счет улучшения его эксплуатационных характеристик, он содержит последовательно соединенные блок ввделения среднего значения, компаратор, блок выделения модуля, блок формирования оценки нагрузки рулевого привода и исполнительное реле, и также модель угловой скорости судна, причем выход интегратора и выход модели угловой скорости судна через перекидной контакт исполнительного реле подключены к третьему входу суммато(Л ра, выход датчика угловой скорости судна соединение первым входом модес ли угловой скорости судна и через размыкающий контакт исполнительного реле - с четвертым входом сумматора, выход датчика угла перекладки руля подключен к второму входу модели угловой скорости судна, к входу блосо ка шеделения среднего значения и к СП второму входу компаратора. ОС
| Шпейер Г.Э | |||
| Управление подвижными надводными объектами автоматическое | |||
| Энциклопедия Автоматизация производства и промышленная ав- | |||
| тематика | |||
| - М., 1965, т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| 0 |
|
SU161162A1 | |
| Поиякин Л.Г., Тарасин А.Ф., Мордовченко Д.Н | |||
| Техническая эксплуатация авторулевых | |||
| - М.: Транспорт, 1980, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
