Изобретение относится к геофизике, а более конкретно к технике физического моделирования электродинамических процессов на
электролитических моделях геоэлектрических разрезов.
Цель изобретения - повышение точности и производительности измерений.
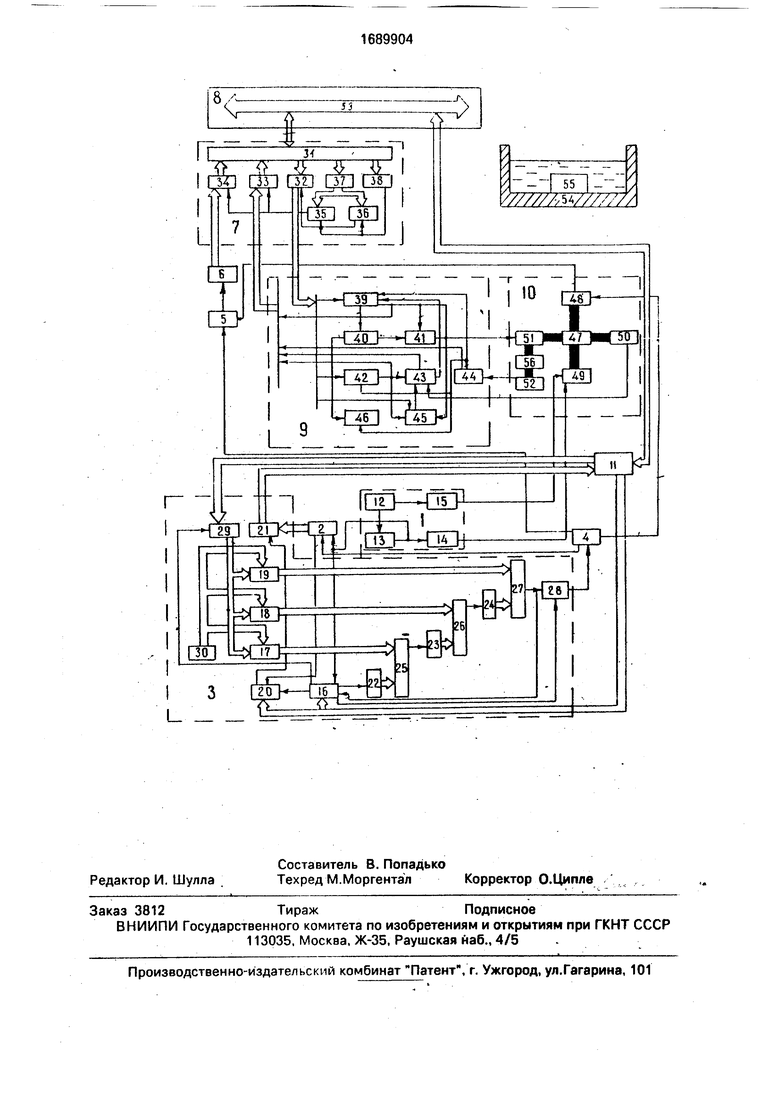
На чертеже представлена блок-схема устройства.
Устройство содержит задающий генератор 1, измеритель 2 временных интервалов, блок 3 выбора задержек, генератор 4 стробирующих импульсов, синхронный детектор 5, регистратор 6, дополнительный интерфейс 7, блок 8 управления, контроллер 9, блок 10 координатной системы, интерфейс 11 параллельного обмена,
Задающий генератор 1 содержит формирователь 12 импульсов, формирователь 13 тактовых импульсов, схему 14 задержки тактовых импульсов, усилитель 15 мощности. Блок выбора 3 задержек содержит схему 1 б управления блоком выбора задержек, схему 17 индикации мкс х 1, схему 18 индикации мкс х 0,1, схему 19 индикации мкс х 0,01, схему 20 управления Запись- считывание, выходной регистр 21, линии задержек мкс х 1 22, мкс х 0,1 23, мкс х 0,01 24, мультиплексоры мкс х 1 25, мкс х 0,1 26 и мкс х 0,01 27, формирователь 28 синхроимпульсов, входной регистр 29 кода задержки, схему 30 автономного выбора задержек.
Дополнительный интерфейс 7 содержит блок 31 канальных приемопередатчиков, регистр 32 команд, регистр 33 состояния, регистр 34 данных, дешифратор 35 ввода, дешифратор 36 вывода, регистр 37 адреса, дешифратор 38 адреса. Контроллер 9 содержит схему 39 управления движением каретки, схему 40 коррекции местоположения каретки, блок 41 токовых ключей, схему 42 блокировки останова каретки, схему 43 сброса движения каретки, схему 44 определения Начало-конец профиля, схему 45 задержки сброса, блок 46 счета и индикации пикетов.
Блок 10 координатной системы состоит из каретки 47, приемного зонда 48, генераторного зонда 49, детектора 50 положения каретки, привода 51 каретки, датчики 52 Начало-конец профиля. Блок 8 управления выполнен на базе ЭВМ, содержит канал 53 блока управления, Устройство содержит также электролитическую ванну 54, модель 55, подобную геометрически и электрически исследуемому объекту, платформу 56 с размещенными на ней узлами блока 10 координатной системы.
Устройство работает следующим образом.
Напряжение, вызванное становлением поля, подается на приемный зонд 48, где происходит стробирование сигнала синхроимпульсом с периодом Тн 0,1 мкс, приходящим с генератора 4 стробирующих импульсов. Отсчет времени задержки стробирующего импульса ведется от переднего фронта то-
- кового импульса измерителем 2 временных интервалов. Для определения момента времени, с которого начинается процесс становления поля, - начального времени при
нулевом коде задержки, установленном блоком 8 управления, с помощью генератора 4 стробирующих импульсов путем плавной подстройки задержки строб-импульса определяется момент появления сигнала to. По0 следовательно увеличивая задержку стробирующего импульса относительно to, получают кривую становления поля над горизонтально-слоистой моделью.
Затем осуществляется автоматический
5 выбор начального времени т.Нач становления поля путем коррекции времени to из сравнения экспериментальной кривой становления с кривой, рассчитанной для данной горизонтально-слоистой модели. Коррек0 ция времени tHa4 необходима, поскольку передний или задний фронт токового импульса имеет конечную длительность, а также поскольку tnan зависит от конструкции генераторного и приемного диполей, длины коаксиальных ли5 ний связи, аппаратурных задержек импульсов синхронизации,
Время т.Стан от момента начала становления поля до момента появления строб -им- пульса определяется по формуле
0TcT3H tcTpo6 tHa4,
где t-строб - величина, отсчитываемая с точностью (-0,005 мкс.
После выбора тнач работа устройства может быть осуществлена в одном из трех авто5 матических (или автономных) режимах, совмещенный, профилирование, зондирование.
При профилировании блоком 8 управления устанавливается первое время задерж0 ки ti, и при данном фиксированном времени задержки осуществляются измерения по профилю с остановками на каждом пикете, после чего устанавливается следующее время задержки t2...ti, и цикл повторяется.
5 При зондировании блоком Зуправления зонды устанавливаются на заданный пикет и снимается кривая становления поля на всех заданных блоком управления временах задержки ti...ti. При совмещенном режи0 ме, последовательно останавливаясь на каждом пикете, снимается кривая становления поля на всех временах ti...ti.
В процессе работы устройства задаю5 щий генератор 1 вырабатывает две серии импульсов (25 и 12,5 Гц), синхронных с частотой питающей сети 50 Гц. Сигналы частотой 12,5 Гц с формирователя 12 импульсов через усилитель 15 мощности поступают на вход коммутации генераторного зонда 49, а на вход синхронизации зонда - сигналы с
частотой 25 Гц, длительностью 14 мкс с задержкой 2 мкс с выхода схемы 14.
Сигналы частотой 25 Гц, длительностью 14 мкс с формирователя 13 тактовых импульсов поступают на вход запуска измерителя 2 временных интервалов и вход схемы 14 задержки тактовых импульсов. На входной регистр 29 поступает код задержки в двоично-десятичном виде с устройства 8 управления через интерфейс 11 параллельного обмена и записывается в этом регистре. С выхода входного регистра 29 код задержки через схемы 17-19 индикации поступает на адресные входы мультиплексоров 24, 26 и 27. Тактовый импульс частотой 25 Гц, длительностью 14 мкс, равный по длительности токовому импульсу, поступающему с задающего генератора 1 на вход управления схемы 16 управления, последовательно задерживается линиями 22-24 задержки в иапазонах 0-9; (К),9; 0-0,09 мкс соответственно.
На выходе формирователя 28 синхроимпульсов формируется импульс, передний фронт которого задержан относительно переднего или заднего фронта токового импульса на величину
1+№хО,1+№хО,01 где NI - задержка, определяемая мультиплексором 25;
N2 - задержка, определяемая мультиплексором 26;
N3 - задержка, определяемая мультиплексором 27.
По сигналу Вывод устройства 8 управления код задержки записывается в 12-разрядном входном регистре 29 кода задержки. Аналогично происходит задержка перепада напряжения с шагом 0,1 и 0,01 мкс. Сфор-, мированный импульс синхронизации заерживается относительно заднего фронта тактового импульса.
С выхода формирователя 28 синхроимпульсов задержанный импульс поступает на вход внешнего запуска генератора 4 стро- бирующих импульсов, с выходов которого строб-импульсы синхронизации поступают на вход сброса счета измерителя 2 временных интервалов, приемный зонд 48 и вход синхронизации синхронного детектора 5.
С приходом на измеритель 2 временных интервалов строб-импульса с генератора 4 стробирующих импульсов измеритель 2 заканчивает отсчет интервала времени. С выода измерителя 2 значение интервала времени в цифровом виде поступает под управлением схемы 20 на выходной регистр 21, где запоминается в соответствии с программой управления через интерфейс 11 передается в блок 8 управления. В режиме работы по заднему фронту тактового импульса на
схему 14 задержки с формирователя 13 приходит тактовый импульс, с формирователя 12 импульсов через усилитель 15 мощности на вход коммутации генераторного зонда 49 поступают импульсы, а на вход синхронизации генераторного зонда 49 - тактовые импульсы, задержанные на 2 мкс.
По переднему фронту тактового импульса измеритель временных интервалов начинает
счет. Блок 3 выбора задержек, задерживает задний фронт тактового импульса на заданную величину задержки t3. По переднему фронту задержанного импульса запускается генератор 4 стробирующих импульсов,
имеющий плавно регулируемую задержку строба в диапазоне At. По переднему фронту строба прекращается счет интервала времени в измерителе 2.
Строб-импульс сдвинут относительно
заднего фронта тактового импульса на величину t t3+ti. Изменением положения строба в /-.изпазоне At осуществляется компенсация задержки 1 мкс токового импульса и начального положения строба ti, тем самым
строб выводится на задний фронт токового импульса.
С выхода синхронного детектора 5, на сигнальный вход которого поступают сигналы с приемного зонда 48, постоянное напряжение, пропорциональное амплитуде принимаемого сигнала, поступает на регистратор 6, с выхода которого, сигнал в цифровом виде через дополнительный интерфейс 7 поступает в блок 8 управления.
С выхода блока 8 управления через дополнительный интерфейс 7 на командный вход контроллера 9 поступают команды управления движением каретки 47. С выхода состояний контроллера через дополнительный интерфейс 7 и блок 8 управления поступает информация о состоянии блока 10 координатной системы.
Формула изобретения
1. Устройство для моделирования нестационарных электромагнитных полей, содержащее модель, подобную геометрически и электрически исследуемому объекту, электролитическую ванну, задающий генератор, первый и второй выходы которого подключены к входу коммутации и входу синхронизации генераторного зонда, приемный зонд, выход которого соединен с измерительным входом синхронного детектора, выход которого соединен с входом регист. ратора, отличающееся тем, что, с целью повышения точности и производительности измерений, содержит блок выбора задержек, генератор стробирующих импульсов, измеритель временных интервалов, блок координатной системы, контроллер, блок управления, интерфейс параллельного обмена и дополнительный интерфейс, при этом первый выход блока управления соединен с канальным входом дополнительного интерфейса, выход которого подключен к командному входу контроллера, установочный вход которого соединен с установочным выходом блока координатной системы, а вход ограничения контроллера соединен с выходом ога- ничения блока координатной системы, выход состояний контроллера подключен к первому информационному входу дополнительного интерфейса, а токовый выход контроллера подключен к входу управления движением блока координатной системы, выход регистратора подключен к второму информационному входу дополнительного интерфейса, вход синхронизации синхронного детектора соединен с первым выходом генератора стробирующих импульсов, втором выход которого подключен к входу npneMf ого зонда, выход формирования тактовых импульсов задающего генератора соединен с управляющим входом блока выбора задержек и с входом запуска измерителя временных интервалов, выход кода интервала времени которого соединен с первым информационным входом блока выбора задержек, выход Конец преобразования измерителя временных интервалов соединен с входом Запись-считывание блока выбора задержек, второй информационный вход блока выбора задержек соединен с первым выходом интерфейса параллельного обмена, второй выход которого соединен с канальным входом блока выбора задержек, информационный выход которого подключен к первому входу интерфейса параллельного обмена, второй вход которого подключен к второму входу блока управления, выход синхронизации блока выбора задержек соединен с входом внешнего запуска генератора стробирующих импульсов, третий выход которого подсоединен к входу сброса счета измерителя временных интервалов.
2.Устройство поп. 1,отличающее- с я тем, что задающий генератор состоит из формирователя импульсов, формирователя тактовых импульсов, схемы задержки тактовых импульсов и усилителя мощности, при этом первый выход формирователя импульсов соединен с входом усилителя мощности, а второй выход - с входом формирователя тактовых импульсов, выход которого соединен с входом схемы задержки тактового импульса и является выходом формирования тактовых импульсов задающего генератора.
3.Устройство по пп. 1 и 2, отличающее с я тем, что контроллер состоит из
схемы управления движением каретки, схемы коррекции местоположения каретки, блока токовых ключей, схемы блокировки останова каретки, схемы сброса движения
каретки, схемы определения Начало-конец профиля, схемы задержки сброса, блока счета и индикации пикетов, при этом выход состояния схемы управления движением каретки соединен с входами запуска
0 блока токовых ключей и схемы задержки сброса, выход которой подключен к входу сброса схемы сброса движения каретки, выход сброса которой соединен с первым входом сброса схемы управления движением
5 каретки, второй вход сброса которой подключен к выходу управления схемы определения Начало-конец профиля, к счетному входу блока счета и индикации пикетов и к входу сброса схемы блокировки останова
0 каретки, выход состояния которой соединен с управляющими входами схемы сброса движения каретки и схемы задержки сброса, управляющий вход блока счета и индикации пикетов соединен с первым выходом
5 схемы коррекции местоположения каретки, второй выход которой соединен с входом коррекции блока токовых ключей, а вход соединен с управляющим выходом схемы управления движения каретки, при этом ко0 мандные входы схемы управления движением каретки, схемы блокировки останова каретки, схемы задержки сброса являются командным входом контроллера, а выходы состояния схемы сброса движения каретки,
5 схемы определения Начало-конец профиля, схемы управления движением каретки, схемы блокировок останова каретки являются выходом состояния контроллера, выход блока токовых ключей является токовым
0 выходом контроллера, вход схемы определения Начало-конец профиля является входом ограничения контроллера, вход схемы сброса движения каретки является установочным входом контроллера.
5 4. Устройство по пп. 1-3, отличающееся тем, что дополнительный интерфейс содержит блок канальных приемо-передатчи- ков, регистр команд, регистр состояния, регистр данных, дешифратор ввода, дешифратор
0 вывода, регистр адреса, дешифратор адреса, при этом первый выход блока канальных приемопередатчиков подключен к входу дешифратора адреса, выход которого соединен с входами управления дешифратора
5 ввода и дешифратора вывода, информационные входы которых подключены к выходу регистра адреса, вход которого подключен к второму выходу блока, канальных приемопередатчиков, третий выход которого подключен к информационному входу регистра
команд, вход синхронизации которого соединен с выходом дешифратора вывода, выход дешифратора ввода соединен с входами синхронизации регистра состояний и регистра данных, выходы которых подключены соответственно с первым и вторым входами блока канальных приемопередатчиков, третий вход канальных приемопередатчиков является канальным входом дополнительного интерфейса, выход регистра команд является выходом дополнительного интерфейса, информационные входы регистра со- стояния и регистра данных являются соответственно первым и вторым информационными входами дополнительного интерфейса.
5. Устройство по пп. 1-4, отличающееся тем, что блок выбора задержек содержит схему управления блоком выбора задержек, схему индикации мкс х 1, схему индикации мкс х 0,1 схему индикации мкс хО,01и, схему управления Запись-считывание, выходной регистр линии задержек мкс х 1, мкс х 0,1 мкс х 0,01, мультиплексоры мксх 1, мксхО.1 и мксхО,01, формирователь синхроимпульсов, входной регистр кода задержки, схему автономного выбора задержек, при этом выход входного регистра кода задержки подключен к первым входам схем индикации мкс х 1, мкс х 0,1 и мкс х 0,01, к вторым входам которых подключен выход схемы автономного выбора задержек, а выходы схем индикации подключены соответственно к адресным входам мультиплексоров мкс х 1, мкс х 0,1 и мкс х 0,01, информационные входы которых подсоединены соответственно к выходам линий задержек мкс х 1, мкс х. 0,1 и мкс х 0,01, при этом первый выход схемы управления блоком выбора задержек соединен с входом линии задержки мкс х Т, а выходы мультиплексоров мкс х Г, мкс х 0,1 - соответственно с входами линий задержки мксх 0,1, мксх0,01, выход мультиплексора мкс х 0,01 подключен к первому входу схемы управления и к входу
синхронизации формирователя синхроимпульсов, к входу сброса которого подключен второй выход схемы управления, третий выход схемы управления соединен с вторым вхо
дом схемы управления Запись-считывание, выход которой подключен к входу синхронизации выходного регистра, а вход синхронизации входного регистра кода задержки подсоединен к четвертому выходу схемы управления блоком выбора задержек, вход схемы управления является управляющим входом блока, выход формирователя синхроимпульсов является выходом синхронизации блока.
6. Устройство по пп, 1-5, о т л и ч а ю- щ е е с я тем, что блок координатной системы состоит из каретки, приемного зонда, генераторного зонда, детектора положения ; аретки, привода каретки, платформы, дзтчика Начало-конец профиля, при этом на каретке блока координатной системы закреплены генераторный и приемный зонды, а также детектор положения каретки, которая механически соединена с приводом, жестко закрепленном на платформе блока координатной системы вместе с датчиком Начало-конец профиля, информационный вход выходного регистра является первым информационным входом блока,
информационный вход входного регистра кода задержки является вторым информационным входом блока выбора задержек, канальные входы схемы управления и схемы управления Запись-считывание являются
купальным входом блока, выход выходного регистра является информационным выходом блока выбора задержек, первый вход схемы управления Запись-считывание является входом Запись-считывание блока,
второй выход датчика Начало-конец профиля является выходом ограничения блока координатной системы, вход привода каретки явлется входом управления движением блока координатной системы, выход детектора положения каретки является установочным выходом блока координатной системы.
9 I

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ С КАНАЛАМИ СВЯЗИ | 1990 |
|
RU2020565C1 |
| Устройство для функционального контроля интегральных схем | 1988 |
|
SU1737465A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Многоканальное устройство для регистрации информации | 1984 |
|
SU1236452A1 |
| Устройство управления невзрывными источниками сейсмических сигналов | 1983 |
|
SU1132272A1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Устройство для анализа импульсных последовательностей | 1988 |
|
SU1629973A1 |
| Устройство для сопряжения цифровой вычислительной машины с каналом связи | 1991 |
|
SU1837301A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЭВМ С КАНАЛОМ СВЯЗИ | 1992 |
|
RU2043652C1 |
| Устройство телеконтроля состояния стрелок и сигналов | 1986 |
|
SU1348252A1 |
Изобретение относится к геофизике, а более конкретно к технике физического моде- лирования электродинамических процессов на электролитических моделях геоэлектрических разрезов. Цель изобретения - повышение точности и производительности измерений. Указанная цель достигается тем, что устройство для моделирования нестационарных электромагнитных полей содержит модель, подобную электрически и геометрически исследуемому объекту, электролитическую ванну, задающий генератор, первый и второй выходы которого подключены к входу коммутации и входу синхронизации генераторного зонда, приемный зонд, выход которого соединен с измерительным входом синхронного детекторэ, выход которого соединен с входом регистратора, блок управления в виде ЭВМ, интерфейс параллельного обмена, дополнительный интерфейс, блок выбора задержек, генератор стробирую- ицих импульсов, измеритель временных интервалов, блок координатной системы, контроллер. Задающий генератор состоит из формирователя импульсов, формирователя тактовых импульсов, схемы задержки тактовых импульсов, усилителя мощности Контроллер содержит схему управления движением каретки, схему коррекции местоположения каретки, блок токовых ключей, схему блокировки останова каретки, схему сброса движения каретки, схему определения Начало-конец пофиля, схему задержки сброса, блок счета и индикации пикетов. Дополнительный интерфейс включает блок канальных приемопередатчиков, регистр команд, регистр состояний, регистр данных, дешифратор ввода, дешифратор вывода, регистр адреса, дешифратор адреса. Блок координатной системы состоит из каретки, приемного зонда, генераторного зонда, детектора положения каретки, привода каретки, платформы, датчика Начало-конец профиля. Изобретение позволяет повысить точность и производительность благодаря обеспечению автоматического выбора начального времени становления поля путем сравнения экспериментальной кривой становления с расчетной и использованию автономных режимов профилирования, зондирования, а также совмещенного режима. 5 з.п. ф-лы, 1 ил. О 00 Ю Ю О N
Wii:
-J
-J
28
У:
| Электроразведочное устройство для моделирования нестационарных электродинамических процессов | 1980 |
|
SU940108A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для моделирования нестационарных электромагнитных процессов | 1985 |
|
SU1408404A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
