Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов с изменяющейся нагрузкой.
Цель изобретения - повышение надежности за счет уменьшения и распределения потерь электроэнергии в электроприводе.
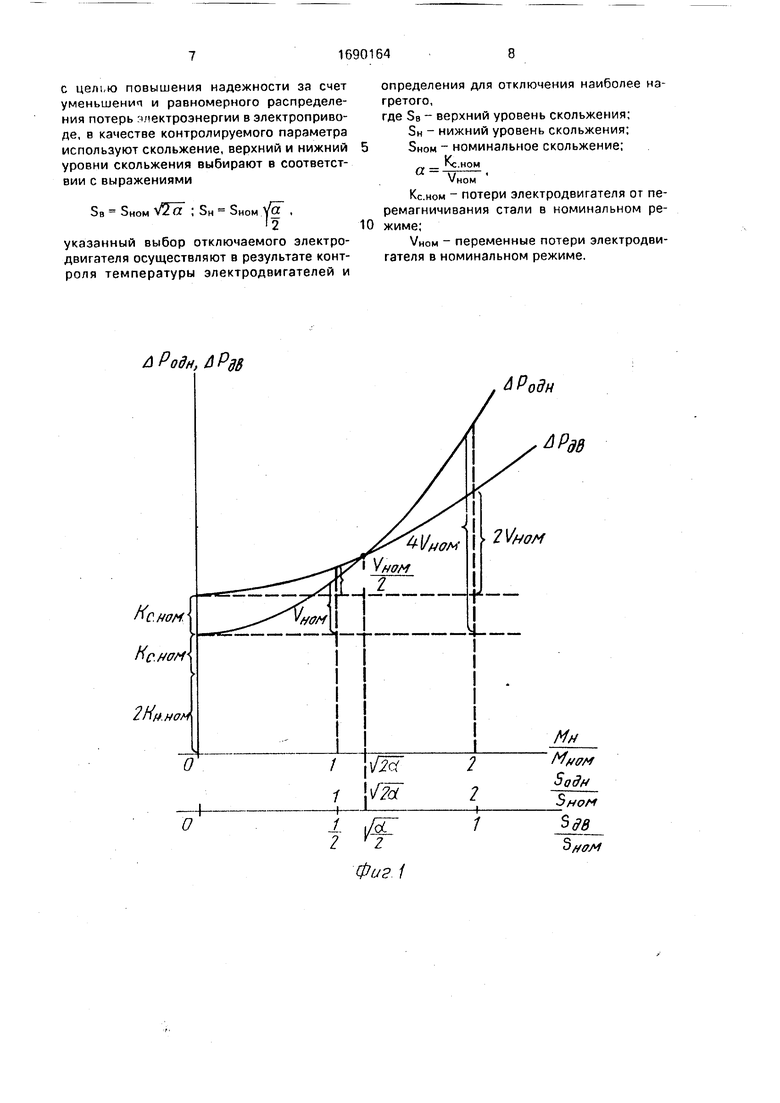
На фиг. 1 показаны зависимости мощности потерь А Родн в однодвигательном и ДРдв в двухдвигательном режимах работы электропривода от момента Мн нагрузки при U UHOM. На фиг. 2 представлена блок- схема устройства управления двухдвига- тельным асинхронным электроприводом для реализации способа управления двухдвигательным асинхронным электроприводом.
Для управления асинхронными электродвигателями 1 и 2 устройство содержит контакторы 3 и 4, исполнительные реле 5 и 6, датчик скольжения 7, пороговые элементы 8 и 9, блок 10 формирования управляющих воздействий, датчики температуры 11 и 12, блок 13 выбора наиболее нагретого электродвигателя. Блок 10 формирования управляющих воздействий содержит асинхронный RS-триггер 14, логические элементы 2И-НЕ 15 и 16, а также элемент НЕ 17. Блок 13 выбора наиболее нагретого электродвигателя содержит вычитающий элеО О О
CS
мент 18 и пороговый элемент 19 с нулевым порогом срабатывания.
Потери Л Р в асинхронном электро- двигагеле могут быть представлены с достаточно высокой точностью (единицы процентов) в следующем виде
ДР К + V Км.ном + Кс.ном- ( гД- )2 +
ином
+V
ном
(
и
)Ч
)
г.
UHOM Оном где К, V - постоянные и переменные потери;
Км.ном, Кс.ном - механические потери и потери от перемагничивания стали в номинальном режиме;
VHOM - переменные потери в номинальном режиме;
U, UMOM действующее текущее и номинальное напряжение сети;
S, SHOM - текущее и номинальное скольжения.
Потери ДРдв электропривода в двух- двигательном режиме складываются из потерь двух работающих электродвигателей, а потери Д Родн в однодвигательном режиме - из потерь одного работающего электродвигателя и механических потерь отключенного от сети другого электродвигателя, т.е.
Д Рдв 2(К + Удв)-2 - Км.ном + Кс.ном U ,2 , w , U
(ин7м )
)2,(-)
К + Уодн + Км.ном.+ Кс.ном U 2 / Зодн -Л ЛЪ
ном . мом-Стт Г.-Я:(1)
ДРОДН
( U 2 , w I ц Л ( одн yiГ0
V тт) + VHOM. -п) . ( ) ,(t)
UHOMUHOMоном
где УдВ, Уодн. - переменные потери одного электродвигателя в двухдвигательном и однодвигательном режимах работы электропривода;
Км - механические потери одного электродвигателя;
5дв, Зодн скольжения электродвигателей в двухдвигательном и однодвигательном режимах.
Переход с двух работающих электродвигателей на один целесообразен с точки зрения уменьшения суммарных потерь электроэнергии в электродвигателях, когда
Д Родн ДР
ДВ.
Для одной и той же нагрузки электропривода скольжения в разных режимах связаны в силу линейности рабочей части механической характеристики электродвигателей соотношением
2$дя Зодн.(3)
С учетом этого легко полумается условие перехода с двух работающих электродвигателей на один, выраженное по отношению к скольжению электропривода S 5Дв в двухдвигательном режиме:
U
2Км.ном + Кс ном ( т-;)
UHOM
ном + Кс.ном (
U
ном
r + W
к,
с ном.
где аном
Переходе одного работающего электродвигателя на два целесообразен, когда
Д Р
ДВ
ДР
одн.
Аналогичным образом с учетом (1) - (3) может быть получено условие перехода с одного работающего электродвигателя на два, выраженное по отношению к скольжению электропривода S Зодн в однодвигательном режиме:
Зодн &
Таким образом, в условиях изменяющейся нагрузки для уменьшения суммарных потерь электроэнергии в электродвигателях переход из двухдвигательного режима в од- нодвигательный следует производить при
30
S SH SHOM.W 2
И)
5
0
5
0
5
т.е. когда измеряемый параметр - скольжение электропривода достигнет значения, меньшего нижнего уровня, переход из одно- двигательного режима в двухдвигательный следует производить при
S SB SHOM - Та ,(5)
т.е. при превышении измеряемым параметром - скольжением электропривода верхнего уровня. Осуществление переходов при любых других 5н и SB, отличных от (4) и (5), приводит к увеличению суммарных потерь электроэнергии в электродвигателях.
При осуществлении перехода из двухдвигательного режима в однодвигательный и обратно по суммарному статорному току электродвигателей или, что более точно, по активной составляющей этого тока, как это делается в способе-прототипе, не удается добиться минимума суммарных потерь электроэнергии в электродвигателях. Даже если для заданного напряжения сети U const выбрать уровни тока, по которым изменяют режим работы электропривода, соответствующими уровням скольжения (4) и (5), то при отклонениях питающего напряжения, когда U Ј const, условия (4) и (5) нарушаются, и появляются дополнительные потери электроэнергии, которых нет при изменении режима работы электропривода по скольжению, как это предлагается, Кроме того, поочередное отключение электродвигателей при снижении нагрузки электропривода, как это делается в способе-прототипе, не устраняет неодинаковой загрузки электродвигателей (которая в общем случае возникает при параллельной их работе) и приводит к неодинаковому их разогреву и тепловому износу изоляции, а также к неодинаковому износу механической части электродвигателей. Осуществляя отключение наиболее нагретого электродвигателя, т.е. того, на который в следствие неодинаковости механических характеристик приходится большая нагрузка, удается искусственно выровнять загрузку обоих электродвигателей, обеспечить тем самым одинаковый износ их изоляции и механической части и за счет этого повысить надежность электропривода. Таким образом, предлагаемый способ управления двухдви- гательным асинхронным электроприводом позволяет повысить надежность электропривода за счет уменьшения и равномерного распределения потерь электроэнергии в электродвигателях.
Зависимости мощности потерь АРдвв двухдвигательном и ДРодн в однодвига- тельном режимах от момента Мн нагрузки электропривода, показанные на фиг. 1, построены в соответствии с (4) и (5) для U UHOM. На фиг. 1 показаны соответствующие нагрузке значения скольжения в двухдвигательном и однодвигательном режимах. Момент Мн нагрузки и скольжения 5дв и 50дн выражены по отношению к параметрам номинального режима одного злектродвигате- ля - вращающему моменту МНом и скольжению 5Ном.
В устройстве управления (фиг, 2), реализующем способ, датчик скольжения 7 измеряет скольжение асинхронных электродвигателей 1 и 2, работающих на общую нагрузку. Пороговые элементы 8 и 9 осуществляют сравнение текущего скольжения S с нижним 5н и верхним SB уровнями и формируют соответственно сигналы отключения и подключения электродвигателя к сети. Контроль температуры электродвигателей 1 и 2 производится посредством датчиков температуры 11 и 12, выбор наиболее нагретого электродвигателя осуществляется блоком 13. Блок 10 формирования управляющих воздействий преобразует сигналы, соответствующие необходимости отключения и подключения электродвигателя к сети, в также выбора наиболее нагретого электродвигателя в сигналы упрлпления электродвигателями 1 и 2.
После запуска электроприподз скольжения S имеет наибольшее значение, и на
5 выходе порогового элемента 8 существует логический О, а на выходе порогового элемента 9 - 1, которая устанавливает триггер 14 в состояние О. Поэтому элементы 2И-НЕ 15 и 16 имеют на выходах 1 неза0 висимо от сигналов на их вторых входах и электродвигатели 1 и 2 посредством исполнительных реле 5 и б, а также контактов 3 и
4оказываются подключенными к питающей сети. Электропривод работает в двухдвига5 тельном режиме, и этот режим сохраняется при достаточно больших S, соответствующих большим нагрузкам. С уменьшением нагрузки уменьшается и соответствующее ему значение сигнала на выходе датчика
0 скольжения 7. При S Sa пороговый элемент 9 переходит в О, триггер 14 сохраняет состояние О, соответствующее работе с двумя электродвигателями. Если оказывается
, то на выходе порогового элемента 8 5 появляется 1, триггер 14 устанавливается
в 1 и, поскольку на вторые входы элементов 2И-НЕ 15 и 16 поступают инверсные сигналы с блока 13, то на выходе одного из этих элементов 1 сменится на О и про0 изойдет отключение одного из работающих электродвигателей. Если : моменту перехода триггера 14 в 1 более высокую температуру имеет электродвигатель 1, то ка выходе порогового элемента 19, имеющего нулевой
5 порог срабатывания, существует 1 и О появится на выходе элемента 15, приводя к отключению от сети электродвигателя 1. При более высокой температуре у электродвигателя 2 на выходе блока 13 будет О и
0 произойдет отключение от сети этого электродвигателя. В дальнейшем электропривод работает в однодвигательном режиме до тех пор, пока нагрузка не возрастет до величины, при которой S SB. Тогда на выходе
5 порогового элемента 9 появляется 1, триггер 14 устанавливается в О, и снова работают оба электродвигателя 1 и 2. Формула изобретения Способ управления двухдвигательным
0 асинхронным электроприводом, при котором после подключения двух электродвигателей к сети контролируют параметр работы электропривода, сравнивая его с нижним и верхнем заданными уровнями, и при дости5 жении указанным параметром значения, меньшего нижнего уровня, производят выбор отключаемого электродвигателя, последующее его подключение осуществляют при превышении указанным параметром верхнего уровня, отличающийся тем, что,
с целью повышения надежности за счет уменьшении и равномерного распределения потерь члектроэнергии в электроприводе, в качестве контролируемого параметра используют скольжение, верхний и нижний уровни скольжения выбирают в соответствии с выражениями
SB SHOM V77F ; SH S
ном
«
2
указанный выбор отключаемого электродвигателя осуществляют в результате контроля температуры электродвигателей и
0
определения для отключения наиболее нагретого, где SB - верхний уровень скольжения;
SH - нижний уровень скольжения;
SHOM - номинальное скольжение;
Кс.ном 7
VHOM
Кс.ном потери электродвигателя от пе- ремагничивания стали в номинальном режиме;
VHOM - переменные потери электродвигателя в номинальном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ импульсного управления асинхронным электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1987 |
|
SU1539949A1 |
| Двухдвигательный электропривод постоянного тока и способ управления им | 1990 |
|
SU1802394A1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2035839C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2014723C1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Двухдвигательный регулируемый электропривод | 1979 |
|
SU879725A1 |
| Устройство для управления двухдвигательнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU830624A1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Способ определения долевого участия потребителей в ухудшении неуравновешенности напряжений | 1990 |
|
SU1749852A1 |
| Двухдвигательный электропривод | 1991 |
|
SU1833961A1 |
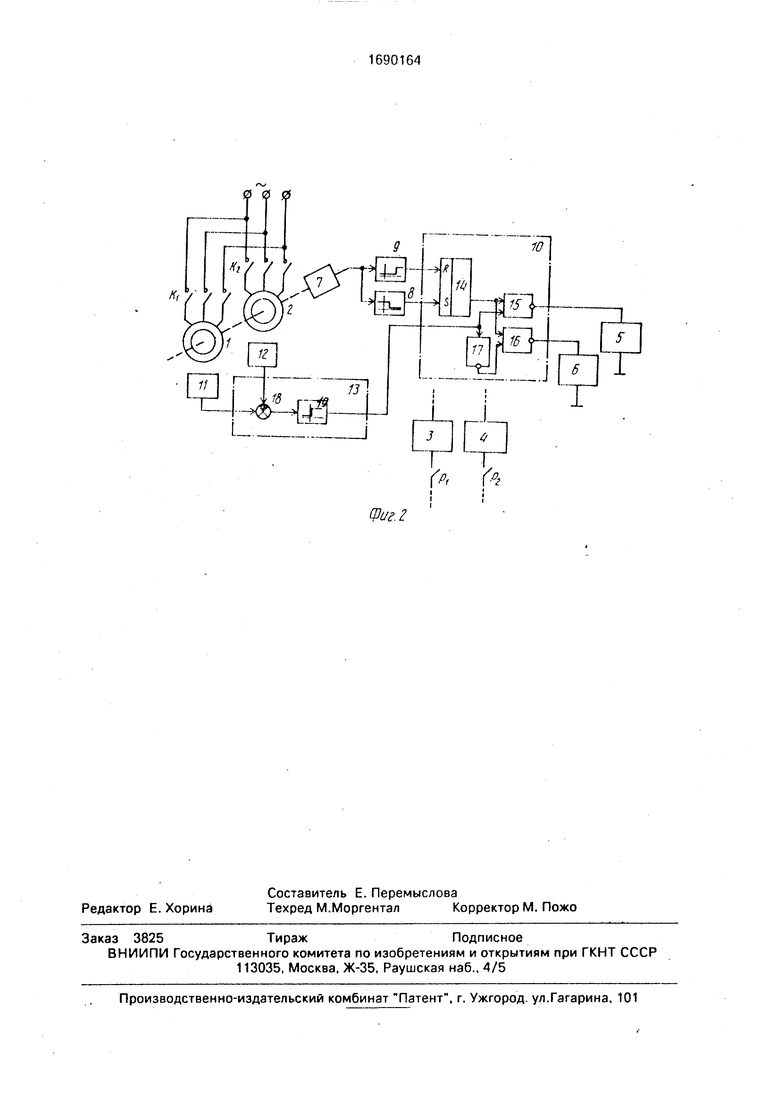
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов с изменяющейся нагрузкой. Целью изобретения является повышение надежности за счет уменьшения и распределения потерь электроэнергии в электроприводе. В устройстве, реализующем способ управления двухдвигательным асинхронным электроприводом, датчик скольжения 7 измеряет скольжение асинхронных электродвигателей 1 и 2, работающих на общую нагрузку. Пороговые элементы 8 и 9 осуществляют сравнение текущего скольжения S с нижним SH и верхним SB уровнями и формируют соответственно сигналы отключения и подключения электродвигателя к сети. Контроль температуры электродвигателей 1 и 2 производится посредством датчиков температуры 11 и 12, выбор наиболее нагретого электродвигателя осуществляется бло- ком -13. Блок 10 формирования управляющих воздействий преобразует сигналы, соответствующие необходимости отключения и подключения электродвигателя к сети, а также выбора наиболее нагретого электродвигателя, в сигналы управления электродвигателями 1 и 2. 2 ил. (Л С
ДРодн,АРдВ
2Ну ном О
/
/ №%
j-i-
±
2
/-OL
к г
АРодн
АР08
Ми
;
/-OL
к г
Фиг 1
S//0S4
000
v °
т-ФНйI
-PI
т V
(ь (ъ
| Горный журнал, 1983 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Многодвигательный электропривод | 1986 |
|
SU1381681A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
