(54) УСТРОЙСТВО для УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ ЭЛЕТРОПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1980 |
|
SU892630A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для синхронного управления приводами | 1979 |
|
SU868814A1 |
| Задающее устройство системы управления электроприводом | 1986 |
|
SU1381674A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Следящая система | 1983 |
|
SU1142811A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Бесконтактное переключающее устройство грубого и точного каналов | 1986 |
|
SU1383290A1 |
1
изобретение относится к электротехнике и может быть использовано для управления электродвигателями или гидравлическими устройствами с электрической синхронизацией.
Известно устройство управления электромеханическими и гидравлическими нажимными устройствами, содержащее канал управления совместным перемещением и канал синхронизации двух двигателей 1.
Недостатком этого устройства является то, что оно обеспечивает отработку сигнала по каналу синхронизации с запаздыванием в тех случаях когда по каналу совместного перемещения превышает сумму сигнала по каналу синхронизации с уровнем допустимого управления двигателем. Эт объясняется тем, что большой сигнал по каналу совместного перемещения нсыщает входные цепи приводов, а сигнал по каналу синхронизации только тогда способен вывести из насыщения опережающий двигатель, если сигнал по каналу совместного перемещения меньше указанной суммы.
Однако, для объектов, как например нажимные механизмы прокат;ных станов,- необходимо, чтобы канал электрической .синхронизации работал с максимальным быстродействием независимо от величины сигнала по каналу совместного перемещения.
Ближайшим по технической сутцности к изобретению является устройство управления двухдвигательным электроприводом, содержащее регулятор совместного перемещения, выход которого
0 через первый ограничитель., соединен с первыми входами первого и второго сумматоров, второй и третий ограничители, входы которых соответственно подключены к выходам первого и вто5рого сумматоров, и регулятор синхронизации, выход которого соединен со BTppHN-j входом первого сумматора непосредственно, а со вторым входом второго сумматора - через инвертор.
0 В этом устройстве сигнал управления после регулятора совместного перемещения имеет дополнительное ограничение, определяемое допустимой мощностью управления двигателем, а
5 сигнал после регулятора синхронизации не ограничивается, поэтому исключается запаздывание при отработке сигнала синхронизации 2.
Недостатком данного устройства
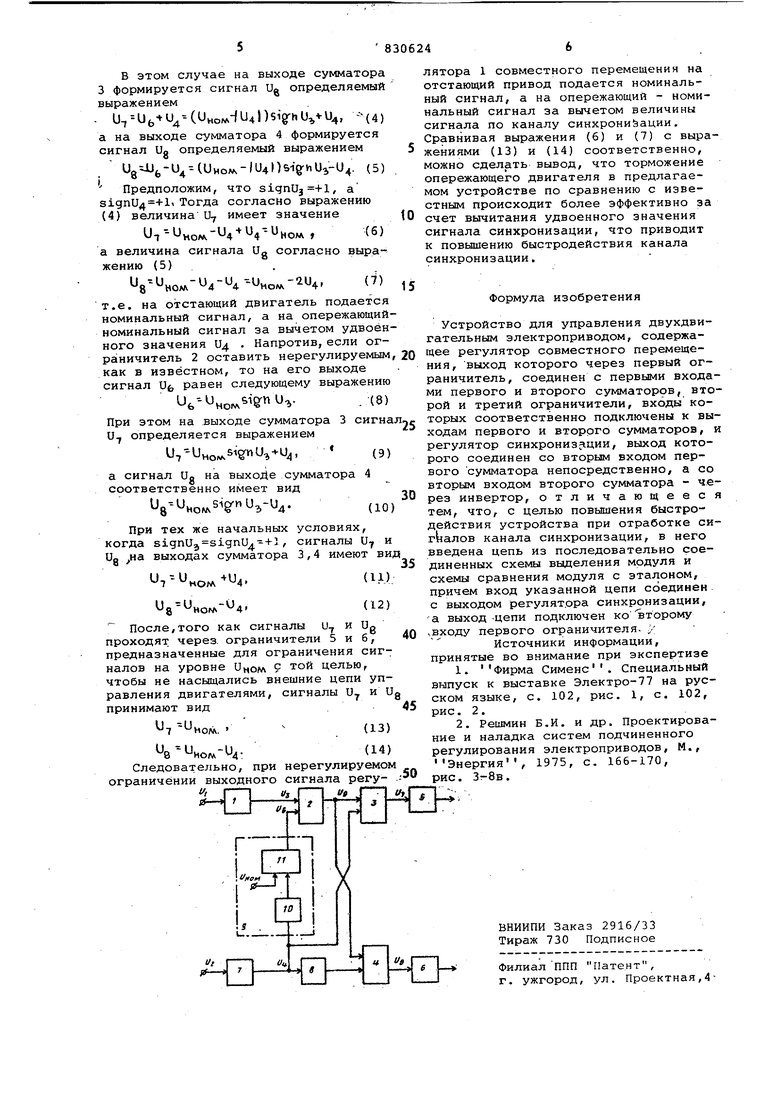
0 .является то, что когда сумма сигналов с выходов первого ограничителя и регулятора синхронизации превышает допустимый уровень управления двигателем, быстродействие контура синхронизации снижается. Объясняется эт тем, что быстродействие обеспечиваемой синхронизации зависит от абсолютной величины сигнала по каналу совместного перемещения: чем больше величина этого сигнала, тем меньше остается ресурс на увеличение мощности сигнала управления, подаваемого на отстающий двигатель . В пределе, когда величина сигнала по каналу совместного перемещения достигает ограничения, ресурс на дальнейшее увеличение выходной мощности отсутствует, и, следовательно, синхронизация может осуществляться только за счет уменьшения мощности сигнала управления, подаваемого на опережающий двигатель, что приводит к снижению скорости отработки сигнала по каналу синхронизации в два раза по сравнению с тем случаем, когда величина сигнала по каналу совместного v перемещения равна нулю. Цель изобретения - повышение быстродействия устройства при отработке сигналов канала синхронизации. Для достижения указанной цели в устройство управления двухдвигательным электроприводом дополнительно введена цепь из последовательно соединенных схемы выделения модуля и схемы сравнения модуля с эталоном, причем вход цепи соединен с выходом регулятора синхронизации, а выход цепи подключён ко второму входу перв го ограничителя. Введение схемы выде ления модуля, на вход которой поступает сигнал с выхода регулятора синхронизации и схемы сравнения модуля этого сигнала с аталоном, определяющим допустимую величинусигнала управления двигателем, позволяет формировать сигнал управления для перво го ограничителя. Таким образом, сигнал в канале совместного перемещени соответствующим образом зависит от величины сигнала в канале синхрониза ции, обеспечивая приоритет сигналов по каналу синхронизации при формиро вании сигнала управления для двигате лей. Приоритет сигнала по каналу син хронизации обеспечивает предельное быстродействие этого канала при любых значениях сигнала канала совместного перемещения. На чертеже представлена функциона ная схема предлагаембго устройства. Устройство управления приводом со держит регулятор 1 совместного перемещения, выход которого через первый ограничитель 2 соединен с первыми входами сумматоров 3 и 4, выходы которых соединены соответственно со вх дами второго ограничителя 5 и третьего ограничителя б. Устройство содержит также регулятор 7 синхронизации, инвертор 8 и цепь 9, состоящую из последовательно соединенных схемы 10 выделения модуля и схемы 11 сравнения. Выход регулятора 7 синхронизации соединен со вторым входом первого сум-матера 3 непосредственно, а со вто1 ьм входом сумматора 4 - через инвертор 8, Вход цепи 9 соединен с выходом регулятора 7 синхронизации, а выход цеои 9 подключен ко второму входу первого ограничителя 2. Устройство работает следующим образом. На входы регу71ятора 1 совместного перемещения и регулятора 7 синхронизации, являющиеся входами устройства, поступают соответственно от внешних . источников сигнал U, rio совместному перемещению и сигнал и синхронизации. Сигналы и и U2 представляют собой соответствующие величины рассогласования по каналу совместного перемещения и по каналу синхронизации. С выхода регулятора 1 сигнал Uj , сформированный согласно выбранному закону регулирования, поступает на первый вход ограничителя 2. На второй вход ограничителя 2 подают сигнал U с выхода цепи 9. Выходной сигнал и ограничителя 2 поступает на первые входы сумматоров 3 и 4. Выходные сигналы и и Ug сумматоров 3 и 4 через соответствующие ограничители 5 и б подают на входы внешних цепей управления приводами. Выходной сигнал 04 регулятора 7 синхронизации поступает на второй вход сумматора 3 непосредственно и Через инвертор 8 - на второй вход сумматора 4. Сигнал и с выхода регулятора 7 поступает также на вход цепи 9, состоящий из схемы 10 выделения модуля, на выходе которой формируется сигнал, равный , и схемы 11 сравнения модуля fu/jj с эталоном UHON. На выходе схемы 11 сравнения формируется сигнал, определяемый выражением .-f U, | . ц. Величина UHOI соответствует номинальному уровню ограничения, формируемого ограничителем 2. С выхода схемы 11 сравнения сигнал Ug- поступает на второй вход ограничителя 2, определяя этим caMbHvi уровень формируемого ограничения. В результате этого на выходе ограничителя 2 сигнал и мржет принимать значения, определяемые как -(UHoM-/U4/ Uj,(UHOM-/U4/). (2) Если величина сигнала Uj на выходе регулятора 1 совместного перемещения превышает величину формируемого ограничения. Uj- , то сигнал U принимает граничные значения неравенства (2) т.е. равен следующему О, (UHOM-U4l)s-i6HU, .
В этом случае на выходе сумматора 3 формируется сигнал Ug определяемый выражением
- lJT-(JbtU4--(UHoN4-iU4l)si8rhU,,U4, --(4) а на выходе сумматора 4 формируется сигнал Ug определяемый выражением
U3aj(,-U4--CUMoN4-|U4l)5i hU3-U4. (5)
Предположим, что signU3 +l, а signU4 +l Тогда согласно выражению (4) величинаUy имеет значение
UT--UHo -U4- U4--UHOM, (6) а величина сигнала Ug согласно выражению (5) -и,-и,--Uv 8 НОдл 4 4 НО№ Т.е. на отстающий двигатель подается номинальный сигнал, а на опережающий номинальный сигнал за вычетом удвоен ного значения U . Напротив, если ограничитель 2 оставить нерегулируемым как в известном, то на его выходе сигнал U{, равен следующему выражению Ufe-JHorA S v . (8) При этом на выходе сумматора 3 сигна U-J определяется выражением JT JbONvS i J U, « (9) а сигнал Ug на выхоДе сумматора 4 соответственно имеет вид 8- Ьо л58 3- 4 При тех же начальных условиях, когда signU5 signU4-+2, сигналы и и Ug на выходах сумматора 3,4 имеют ви . U8 После,Того как сигналы и и Ug проходят через, ограничители 5 и 6, предназначенные для ограничения сигналов на уровне UHOW 9 целью, чтобы не насыщались внешние цепи управления двигателями, сигналы U и U принимают вид й-и.,лл-и,. Следовательно, при нерегулируемом ограничении выходного сигнала регулятора 1 совместного перемещения на отстающий привод подается номинальный сигнал, а на опережающий - номинальный сигнал за вычетом величины сигнала по каналу синхронизации. Сравнивая выражения (6) и (7) с выражениями (13) и (14) соответственно, можно сделать вывод, что торможение опережающего двигателя в предлагаемом устройстве по сравнению с известным происходит более эффективно за
0 счет вычитания удвоенного значения сигнала синхронизации, что приводит к повышению быстродействия канала синхронизации. Формула изобретения Устройство для управления двухдвигательным электроприводом, содержащее регулятор совместного перемещения, выход которого через первый ограничитель, соединен с первыми входами первого и второго сумматоррв, второй и третий ограничители, входы которых соответственно подключены к выходам первого и второго сумматоров, и регулятор синхрониз;1ции, выход которого соединен со вторым входом первого сумматора непосредственно, а со вторым входом второго сумматора - через инвертор, отличающееся тем, что, с целью повышения быстродействия устройства при отработке канала синхронизации, в него введена цепь из последовательно соединенных схемы выделения модуля и схемы сравнения модуля с эталоном, причем вход указанной цепи соединен с выходом регулятора синхронизации, а выходЦепи подключен коЪторому ,входу первого ограничителя- /; Источники информации, принятые во внимание при экспертизе 1.Фирма Сименс. Специальный выпуск к выставке Электро-77 на русском языке, с. 102, рис. 1, с. 102, рис. 2. 2.Решмин Б.И. и др. Проектирование и наладка систем подчиненного регулирования электроприводов, М., Энергия, 1975, с. 166-170, рис. Зг-8в.
